分布式电驱动车车速及路面附着系数融合估计*
2016-04-21高博麟谢书港龚进峰
高博麟,陈 慧,谢书港,龚进峰
(1.天津大学机械工程学院,天津 300072; 2.中国汽车技术研究中心,天津 300300; 3.同济大学汽车学院,上海 201804)
2016035
分布式电驱动车车速及路面附着系数融合估计*
高博麟1,2,3,陈 慧3,谢书港2,龚进峰2
(1.天津大学机械工程学院,天津 300072; 2.中国汽车技术研究中心,天津 300300; 3.同济大学汽车学院,上海 201804)
基于纵向车速融合估计器,结合分布式驱动电动汽车的优势,采用多种估计方法,建立了路面峰值附着系数融合估计器,并进行了实车试验验证。结果表明,建立的基于双卡尔曼滤波技术的车速及路面峰值附着系数融合估计系统,扩大了路面峰值附着系数估计的适用工况范围,保证了纵向车速估计的精度。
分布式驱动电动汽车;双卡尔曼滤波;车速估计;路面峰值附着系数;融合估计
前言
高性能分布式驱动电动汽车的车辆稳定性控制已经成为汽车动力学控制领域的热点问题,其中车速和路面峰值附着系数的准确获取是关键技术之一。
分布式驱动电动汽车的电机集成在轮边或轮毂内,相对传统汽车具有以下特点[1]:①电机转矩大小可以观测,为准确估计车速提供了可能;②四轮纵向力的实时估计准确,有利于提高路面峰值附着系数估计的精度和扩大适用工况范围。
根据估计模型不同,车速的估计方法可以分为运动学估计方法和动力学估计方法[2]。运动学估计方法包括轮速法和直接积分法。轮速法又可以分为最大(小)轮速法、斜率法和综合法等[3]。文献[4]和文献[5]中采用轮速法和直接积分法相互融合的方法,对纵向车速进行估计。动力学估计方法的核心在于对轮胎纵向驱动力和制动力的估计,因此又可分为两类:①基于半经验轮胎模型[6]的纵向力估计,依赖于对路面峰值附着系数的准确获取;②基于车轮动力学模型的纵向力估计[7],不依赖于路面附着条件[8],但须要准确获取车轮驱制动转矩。
结合运动学估计方法和动力学方法的优缺点,文献[9]中设计了车速的融合估计方法,但在车轮制动抱死工况中,如果无法事先获取路面附着条件,仍然无法准确估计车速。为了弥补文献[9]中在上述工况中的不足,本文中基于双卡尔曼滤波技术建立了路面峰值附着系数融合估计器,构建了车速及路面峰值附着系数融合估计系统,并通过实车试验,验证了构建的融合估计系统的有效性。
1 估计系统搭建
1.1 整体架构
首先,针对分布式电驱动车的结构特点,基于联邦卡尔曼滤波技术,构建了多方法融合的纵向车速融合估计器[9],其中包括基于平均轮速法的子滤波器Vx-LF1、基于简化魔术轮胎公式的子滤波器Vx-LF2和基于车轮动力学模型的子滤波器Vx-LF3。
由于单一估计方法都有各自的优点和不足,基于平均轮速法的Vx-LF1在长时间尺度下计算结果的可靠性是动力学方法所不具备的;而在剧烈的驱制动工况下,基于简化魔术公式的Vx-LF2具有很好的优势,但缺点是对路面附着条件和轮胎横纵向滑移率的依赖性较高;在车轮制动抱死的情况下,Vx-LF3的估计结果不再适用。因此,在车轮不抱死的情况下,能够尽可能多地利用基于车轮动力学的Vx-LF3估计纵向车速,可以最大程度地发挥动力学方法的优势,而这也恰恰是分布式驱动电动汽车的优势所在。
因此,在主滤波器中设计了纵向车速子滤波器信息分配规则,使各个子滤波器的适用工况能够互补,从而构建了纵向车速融合估计器,其原理结构如图1所示。
在事先设置正确的路面峰值附着系数信息的条件下,对纵向车速融合估计器进行了仿真结果和实车试验验证。结果显示:相对于单一的纵向车速估计方法,构建的纵向车速融合估计器扩大了纵向车速估计的适用工况范围,且在对接路面的紧急制动工况中,纵向车速的最大估计误差不超过0.5m/s。
由于子滤波器Vx-LF2在估计过程中需要事先获取准确的路面峰值附着系数,否则在制动抱死工况下,纵向车速融合估计器仍然无法准确估计纵向车速,难以满足实际主动安全系统的工作需求。因此,在纵向车速融合估计器的基础上,采用多方法融合的思路,建立路面峰值附着系数融合估计器,构建车速及路面参数融合估计系统,其架构如图2所示。

1.2 基于Vx-LF2的子滤波器μ-LF1

根据双卡尔曼滤波原理,结合Vx-LF2,μ-LF1的状态空间方程为
(1)
该子滤波器的状态向量为
(2)
观测器的输出方程为
(3)
基于式(1)~式(3),建立卡尔曼子滤波器μ-LF1。卡尔曼滤波器的构建过程参见文献[11]。
1.3 基于Vx-LF3的子滤波器μ-LF2
Vx-LF3是基于车轮动力学模型的子滤波器。轮胎纵向附着特性处于强非线性阶段时,轮胎的利用附着系数与峰值附着系数近似相等,因此,通过引入Vx-LF3的纵向力估计结果,基于利用附着系数的定义构建估计模型:
(4)
基于式(4),建立该子滤波器的状态空间方程:
(5)
输入变量为
状态变量为
(6)
子滤波器的输出方程为
(7)
基于式(4)~式(7),建立卡尔曼子滤波器μ-LF2,构建过程参见文献[11]。
1.4 路面峰值附着系数融合主滤波器
主滤波器主要完成两项工作:
(1)判断当前车辆行驶工况,根据子滤波器权重分配规则,分配各子滤波器和主滤波器的权重系数;
(2)根据权重分配系数,对子滤波器的各局部估计结果进行加权融合,得到全局融合的估计结果。
如表1所示,在路面峰值附着系数融合估计器中,子滤波器有各自适用的工况;主滤波器μ-MF则不断存储上一工作循环的路面峰值附着系数的融合估计结果。

表1 附着系数估计子滤波器适用工况对比
注:×表示不适用,O表示适用。
此外,如果液压制动转矩不可获取,在有液压制动系统参与的制动工况中,μ-LF2就无法准确估计路面峰值附着系数。因此,为了充分利用μ-LF1和μ-LF2的特点,扩大融合估计器的工作范围,建立了如图3所示的子滤波器权重分配规则。
2 实车试验验证
分布式驱动电动汽车试验平台如图4所示,其具体参数规格见表2。
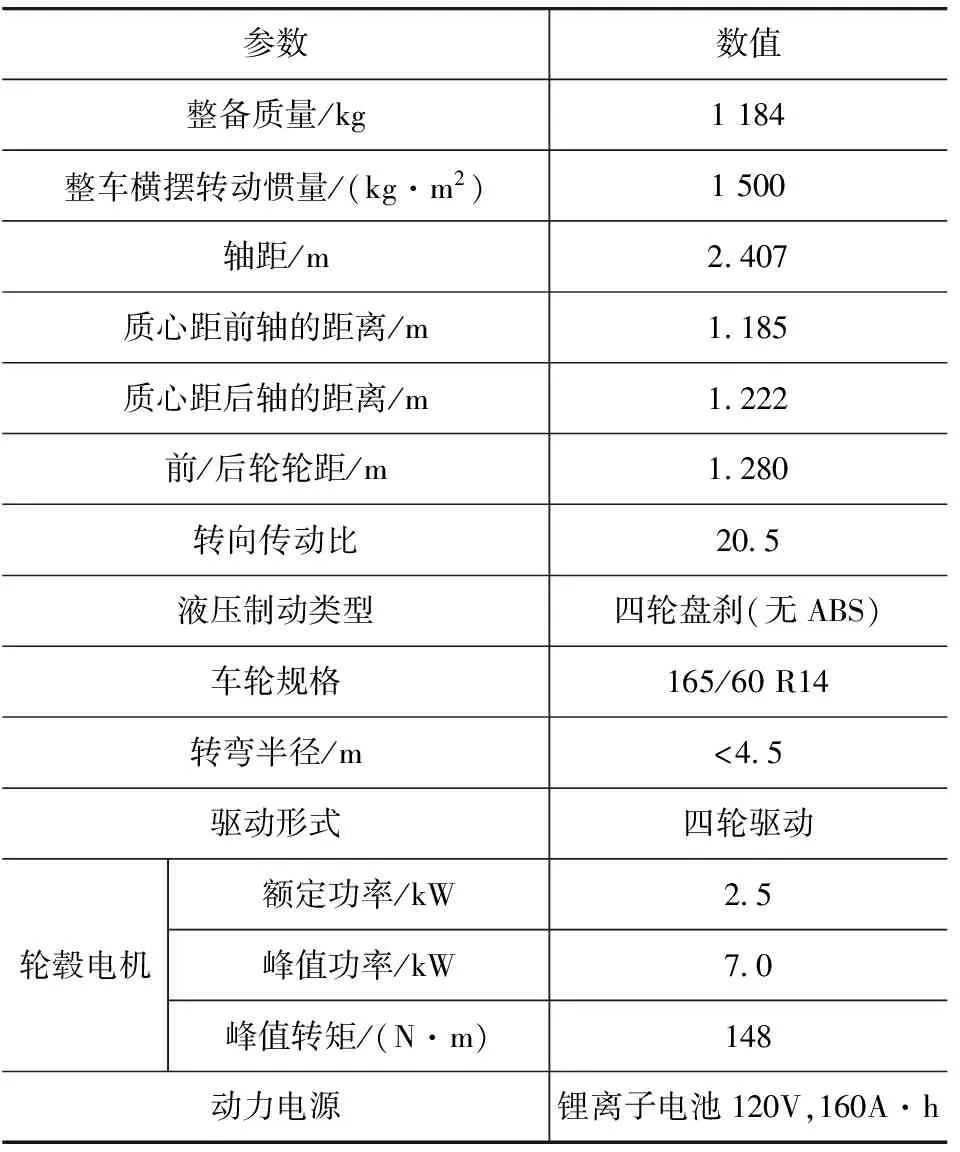
参数数值整备质量/kg1184整车横摆转动惯量/(kg·m2)1500轴距/m2 407质心距前轴的距离/m1 185质心距后轴的距离/m1 222前/后轮轮距/m1 280转向传动比20 5液压制动类型四轮盘刹(无ABS)车轮规格165/60R14转弯半径/m<4 5驱动形式四轮驱动轮毂电机额定功率/kW2 5峰值功率/kW7 0峰值转矩/(N·m)148动力电源锂离子电池120V,160A·h
设计如图5所示的紧急加速-制动试验工况,在图中灰色区域,铺洒沙砾,降低该区域的路面峰值附着系数(μ≤0.6),以确保车辆在该区域内制动可以将车轮抱死。试验过程中,车速及路面峰值附着系数融合估计系统未事先获取路面峰值附着系数,最终车速和路面峰值附着系数的估计结果如图6和图7所示。
由图可见:第9.5s之前,车辆在高附着系数路面上,主滤波器始终将权重分配给μ-MF,因此,其输出结果保持初始值μ=1,此时纵向车速的融合估计的绝对误差小于0.27m/s;从第9.5s开始,车辆进入沙砾路面,车轮发生制动抱死,μ-LF1得到了全部的权重分配系数,其估计结果迅速收敛到μ=0.5附近,使纵向车速的融合估计误差小于0.23m/s;第11s之后,车辆重新回到高附着系数路面,车轮不再制动抱死,主滤波器再次将权重系数重新分配给μ-MF,尽管此时μ的估计结果未能再收敛到0.8,但由于车辆已经停止,因此,对车速估计不产生影响。
在事先未知路面峰值附着系数的情况下,纵向车速的最大绝对估计误差仍然未超过0.5m/s,估计准确度相比于文献[9]中的估计结果没有下降,路面峰值附着系数估计结果与试验路面附着条件吻合,证明了建立的车速及路面峰值附着系数融合估计的有效性。
3 结论
(1)基于纵向车速融合估计器,融合多种估计方法,充分结合了分布式驱动电动汽车的特点,采用双卡尔曼滤波技术,建立了路面峰值附着系数融合估计器,设计了子滤波器的权重分配规则,构建起车速及路面峰值附着系数融合估计系统。
(2)在对接路面附着条件的道路上,进行紧急加速-制动试验,结果表明,建立的车速及路面峰值附着系数融合估计系统,扩大了路面峰值附着系数估计的适用工况范围,保证了纵向车速的估计精度。
[1] 陈慧,高博麟,徐帆.车辆质心侧偏角估计综述[J]. 机械工程学报, 2013,49 (24).
[2] 余卓平,高晓杰.车辆行驶过程中的状态估计问题综述[J]. 机械工程学报, 2009, 45(5).
[3] 吴伟先. 国产ESP开发技术研究—基于压力函数的控制逻辑分析[D].广州:华南理工大学交通学院,2003.
[4] Fredrik Gustafsson, Stefan Ahlqvist, Urban Forssell,et al. Sensor Fusion for Accurate Computation of Yaw Rate and Absolute Velocity[C]. SAE Paper 2001-01-1064.
[5] DAISS A,KIENCKE U. Estimation of Vehicle Speed Fuzzy-estimation in Comparison with Kalman-filtering[C].Control Applications, 1995, Proceedings of the 4th IEEE Conference.
[6] JOHN T Tielking, NAVEEN K Mital.A Comparative Evaluation of Five Traction Tire Models[R]. Interim Document 6,Jan.1974,Highway Safety Research Institute, University of Michigan.
[7] ANTON T Van Zanten, Rainer Erhardt. Control Aspects of the Bosch-VDC[C]. Proc. of AVEC 1996, Aachen, Germany, 1996:573-608.
[8] Kiyoshi Fujii, Hiroshi Fujimoto. Traction Control Based on Slip Ratio Estimation Without Detecting Vehicle Speed for Electric Vehicle[C]. Proc. Power Conversion Conference (PCC2007) , Nagoya.
[9] GAO Bolin, CHEN Hui, CHEN Wei, et al. Longitudinal Velocity Estimation of Electric Vehicle with 4 In-Wheel Motors Based on the Fusion of Kinematics and Dynamics Methods[C]. Proceedings of the International Conference on Advanced Vehicle Technologies and Integration, Changchun, China, July, 2012.
[10] WENZEL T A, BURNHAM K J, BLUNDELL M V, et al. Dual Extended Kalman Filter for Vehicle State and Parameter Estimation[J]. Vehicle System Dynamics, 2006,44(2):153-171.
[11] Greg Welch, Gary Bishop. An Introduction to the Kalman Filter[R].University of North Carolina, Department of Computer Science,TR 95-041.
Velocity and Road Friction Coefficient Fusion Estimation of Distributed Electric Drive Vehicle
Gao Bolin1,2,3, Chen Hui3, Xie Shugang2& Gong Jinfeng2
1.SchoolofMechanicalEngineering,TianjinUniversity,Tianjin300072; 2.ChinaAutomotiveTechnology&ResearchCenter,Tianjin300300; 3.SchoolofAutomotiveStudies,TongjiUniversity,Shanghai201804
Based on the vehicle longitudinal speed fusion estimator, combined with the advantage of distributed drive electric vehicle, and by adopting various estimation methods, a fusion estimator for road peak friction coefficient is established and a real vehicle verification test is conducted. The results show that the dual Kalman filtering technique-based fusion estimation system for vehicle speed and road peak friction coefficient established extends the applicable condition range of road peak friction coefficient and ensures the accuracy of vehicle longitudinal speed estimation.
distributed drive electric vehicle; dual Kalman filtering; vehicle speed estimation; road peak friction coefficient; fusion estimation
*国家973计划项目(2011CB711200)资助。
原稿收到日期为2014年8月12日,修改稿收到日期为2014年9月25日。
