汽车纵向主动避撞DRV安全距离模型建模研究
2015-12-07袁朝春李道宇刘逸群张龙飞
袁朝春,李道宇,吴 飞,刘逸群,张龙飞
(江苏大学汽车与交通工程学院,江苏镇江 212013)
随着汽车保有量的快速增长,道路交通安全问题已经成为各国政府和社会广泛关注的重要问题。美国国家高速公路安全委员会(NHTSA)的调研表明[1]:在道路交通致死事故中,因驾驶员过失造成的约占90%,而因车辆故障造成的仅占约3%。尽管采用了越来越多的被动安全技术(如安全气囊、安全带、行人保护和吸能车体等)减轻了事故的伤害程度,但引发交通事故的原因未得到根本解决。通过对本车(主动避撞车)纵向运动状态的控制发现,使本车与前方目标保持合适的距离或自动维持本车的某种运动状态可实现汽车的纵向主动避撞。
汽车纵向避撞系统通过降低车速和保持足够的车间距离来实现行车安全目标。而智能电动转向系统是通过转向操作,把自车和交通参与者的横向距离维持在一个合理的范围内。
由于道路容量与车速成正比而与车间距离成反比,过低的车速和过大的车间距离会导致道路交通效率的降低。因此,应用于汽车避撞系统的安全距离模型必须兼顾行车安全和道路交通效率两方面的要求。针对不同的工况和系统功能要求,这两方面应有所侧重。
国内外的学者们提出了多种驾驶安全距离模型,利用安全距离的实时计算结果与实际车间距之间的关系进行行车安全状态的判断。这些模型主要有基于制动过程运动学分析的安全距离模型[2]、基于车间时距的安全距离模型[3-4]、驾驶员预瞄安全距离模型[5]。现有安全距离模型主要是以制动系统和发动机为控制对象,当应用于汽车主动避撞研究时存在准确性较低、不能适应复杂多变交通环境的需要、某些关键参数在现有技术条件下不易获得、实用性较低及对驾驶员主观感受因素考虑不够等方面的问题。
影响车辆安全距离的因素主要有:①车辆制动系统性能;② 道路交通信息状况;③ 驾驶员反应能力。现有的安全距离模型还不能同时反映这3个方面因素。
笔者通过综合考虑驾驶员因素、交通路况因素和车辆制动性能因素等,建立了DRV安全距离模型,通过Prescan仿真平台对DRV安全距离模型的有效性进行了验证。
1 现有安全距离模型分析
现有安全距离模型比较有代表性的有如下2个模型[5-7]:
1)Hideo Araki安全距离模型

其中:dw为安全车距;v1,a1代表自车当前的速度和加速度;v2,a2代表前方交通参与者的速度和加速度。此模型考虑了前后车的运动关系,并且根据前后车当前的运动状态分为2种情况:当自车速度相对比较小时,最终制动结束的条件为两车速度相等;当自车相对速度比较大时,制动结束条件为两车的速度均为0。
可以看出:该模型没有考虑驾驶员和道路状况因素对安全距离的影响。
2)马自达公司安全距离模型

其中:dw为安全车距;v1,a1代表自车当前的速度和加速度;v2,a2代表前方交通参与者的速度和加速度;td为驾驶员反应时间;tbrk为制动系统响应时间;d0为两车安全车距。
该模型的基本思想是:当前方交通参与者(或障碍物)以稳定的制动减速度减速时,后车传感器发现并开始向系统传达这种信息;当前后距离低于制动距离时系统给制动器发出指令,自车开始减速,最后两者相对速度为零,此时两车相距d0。模型中系统延迟时间和自车减速时间2个参数是通过大量实验测定的,本模型中前后两车的加速度分别取了不同值。
可以看出:该模型没有考虑道路状况对车辆安全距离的影响。
2 DRV安全距离模型
综合考虑驾驶员因素(driver factor)、交通路况因素(road factor)和车辆制动性能因素(vehicle factor),建立DRV安全距离模型。
2.1 轮胎-路面附着系数辨识
根据 Luis Alvarez 等的研究成果[8-9],轮胎-路面附着系数和车速及轮胎滑移率有关,其辨识函数如式(3)所示。

式中:μ为轮胎-路面附着系数;λ为轮胎滑移率;v为车辆行驶速度;pi(i=1,2,…,5)为常数(同一车型参数固定)。表1为某车型pi常数取值。表2为常见路面轮胎附着系数。

表1 某车型pi常数取值

表2 常见路面轮胎附着系数
2.2 驾驶员制动反应时间建模
驾驶员驾驶能力、疲劳状态和环境因素是对车辆制动安全距离起主要影响的因素,形成对驾驶员反应时间进行评估的状态向量:X=(X1,X2,X3),其中 0≤Xi≤100,i=1,2,3
各向量对驾驶员反应时间影响的权重为wi,
采用综合加权法构造驾驶员反应时间影响评估函数:

其中Tnormal-d=1.25 s,为普通驾驶员在正常状态的制动反应时间。
2.3 最大制动减速度建模
车辆实际制动能力受车辆性能参数、轮胎-路面摩擦因数和实际驾驶环境等的影响。假设车辆制动系统可以发挥道路的最大制动效能,则最大制动减速度主要受轮胎-路面摩擦因数和实际驾驶环境的影响。图1为车辆受力分析情况。

图1 车辆受力分析
当车辆制动系统可以发挥最大制动效能时,

式中:μ为轮胎-路面附着系数;m为整车载荷;α为摩擦力和水平方向夹角。
经过计算可知在不同驾驶环境下,车辆制动最大制动减速度为:

式中ar-max为最大制动减速度。
2.4 DRV安全距离模型建模
在现有车辆制动安全距离模型的基础上[10-11]建立 DRV 模型。

其中:Dw,Dbr分别为追尾碰撞报警距离和自动制动距离;V'l,a'l,V'f,a'f分别为前车和后(己)车的速度和加速度;Tw为后(己)车制动时间,包括驾驶员反应动作时间和制动协调时间;Tbr为自动制动时的制动时间。
在式(1)、(2)中:V'l,a'l,V'f由车速传感器和激光雷达(或毫米波雷达)实际测量并进行滤波和计算获得;a'f,Tw,Tbr为非测量数据,a'f的取值一般和a'l相同,Tw和Tbr是根据实际观察和试验结果在一定范围内取值。一般情况下,通过该车辆制动安全距离模型可以计算出追尾碰撞预警距离和自动制动距离,但问题在于:① 受车辆性能参数、轮胎-路面摩擦因数和实际驾驶环境等的影响,通过测量获得的车辆制动减速度预测在该行驶环境下车辆的实际最大制动能力,计算所得追尾报警距离会过长或过短,造成道路利用率低或追尾预警效果不佳;②未考虑驾驶员因素对模型结果的影响,造成不同驾驶员在不同状态下对该模型实际效果评价不佳。
可以看出:目前所采用的车辆制动安全距离计算模型没有考虑驾驶员、车辆性能和驾驶环境的影响,模型的实用性和通用性受到明显制约。
建立DRV安全距离模型:
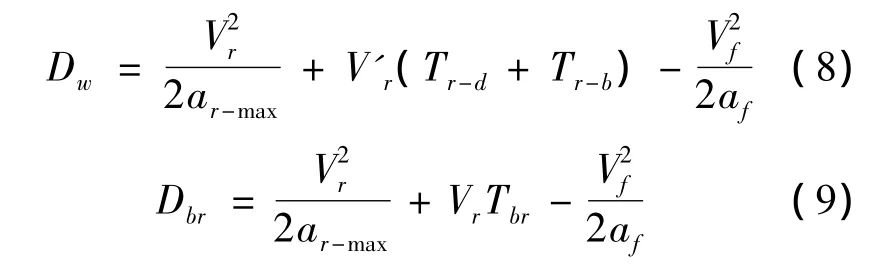
其中:Dw,Dbr分别为追尾碰撞报警距离和自动制动距离;Vr,ar-max分别为后(己)车速度和最大制动减速度;Vf,af分别为前车的速度和加速度;Tr-d为后(己)车驾驶员制动反应时间;Tr-d为后(己)车制动系统响应时间;Tbr为自动制动时的制动时间。
把式(3)、(4)分别代入式(5)、(6)得:

3 DRV安全距离模型效果验证
仿真基于Prescan软件进行。
假设自车驾驶员驾驶经验不足,且为疲劳驾驶状态,驾驶视线不是很好,自车行驶道路为下坡(坡度为30%),当前行驶速度为10 m/s,滑移率为20%,制动系统响应时间为0.2 s;前车因故障抛锚在道路中间。
自车驾驶员反应时间评状态向量为X=(75,50,50),其对应的权重分别为 w=(0.4,0.4,0.2)。
1)驾驶员反应时间影响评估函数[12]为为 1.4 s;
2)轮胎路面附着系数辨识为0.62;
3)自车最大制动减速度为3.06 m/s2。
在该工况下常用两类模型和DRV模型,其报警安全距离和自动制动安全距离如图2所示。
将假设条件输入Prescan并建立模拟场景,得到DRV安全距离模型的报警安全距离为31.33 m,自动制动安全距离为17.33 m(如图2所示);以及Hideo Araki模型的报警安全距离与自动制动安全距离(如图3所示)。马自达模型的报警安全距离如图4所示。

图2 DRV安全距离模型的报警安全距离与自动制动安全距离

图3 Hideo Araki模型的报警安全距离与自动制动安全距离

图4 马自达模型的报警安全距离
在该工况下,常用两类模型和DRV模型报警安全距离和自动制动安全距离的理论值如表3所示。

表3 3种安全距离对比结果
本文设计的DRV安全距离模型的仿真结果显示报警安全距离为31.33 m,理论值为31.34 m,自动制动安全距离为17.33 m,理论值为17.34 m,误差均在0.01 m左右。
综上所述:Hideo Araki模型由于没有考虑道路状况、驾驶员状态因素和车辆制动系统性能,所计算的报警安全距离严重偏小、自动制动安全距离偏小,最终会形成车辆追尾事故。马自达公司所采用的模型虽然没有考虑道路坡度给安全距离模型所带来的影响,但有一个5 m的安全距离,在车辆下坡制动时能够保证模型的有效性,但在上坡避撞状态下会造成距离上的保守。
4 结束语
在分析现有车辆安全距离模型的特点及不足的基础上,综合考虑驾驶员因素、交通路况因素和车辆制动性能因素,建立了DRV安全距离模型。在同等条件下,对现有模型和DRV模型进行安全距离对比分析,结果表明:所建立的DRV安全距离模型可以兼顾驾驶员驾驶特点、交通路况因素和车辆制动性能因素,报警安全距离和自动制动安全距离比现有的模型更加合理。
[1]NTTSA.Traffic Safety Facts 2010 Annual Report[P].DOTHS 810631,2011.
[2]李晓霞,李百川,侯德藻,等.车追尾碰撞预警系统开发研究[J].中国公路学报,2001,14(3):83-85.
[3]Kyongsu Yi,Minsu Woo,Sung Ha Kim,et al.An Experimental Investigation of a CW/CA System for Automobile Using Hardware in the Loop Simulation[C]//Proceedings of the American Control Conference .San Diego,California:[s.n.],1999.
[4]Seiler Peter,Song Bongsob,Hedrick J.Development of a Collision Avoidance System[J].SAE,1998,8:535.
[5]侯德藻,刘刚,高锋,等.新型汽车主动避撞安全距离模型[J].汽车工程,2005(2):186-190.
[6]边明远.考虑驾驶员个体特性的汽车安全行驶间距模型[J].中国机械工程学报,2010,21(12):1502-1506.
[7]董红召,陈炜烽,陈宁,等.车路集成环境下车辆防撞预警安全状态判别模型的研究[J].汽车工程,2011(9):1120-1123.
[8]Genya A,John R.Alarm Timing,T rust and Driver Expectation for Forward Collision Warning Systems[J].Applied Ergonomics,2006,37:577-586.
[9]Luis Alvarez,Jingang Yi,Boberto Horowitz,et al.Emergency braking control in automated highway systems with underestimation of friction coefficient[C]//Proceedings of the American Control Conference.Chicago:[s.n.],2000:574-579.
[10]Kenue S k.Selection of range and azimuth angle parameters for a forward looking collision warning radar sensor[C]//Intelligent Transportation Systems’97.Boston:IEEE,1997:494-499.
[11]党宏社,韩崇昭,段战胜.汽车防碰撞报警与制动距离的确定[J].长安大学学报:自然科学版,2002,22(6):89-91.
[12]李霖,朱西产,马志雄.驾驶员在真实交通危险工况中的制动反应时间[J].汽车工程,2014,36(10):1225-1229.