基于ADAMS的汽车侧翻稳定性仿真分析
2015-12-07金智林赵曰贺
张 雷,金智林,赵曰贺,赵 锋
(南京航空航天大学车辆工程系,南京 210016)
汽车侧翻是一种致命的交通事故。美国国家公路交通安全管理局(NHTSA)的交通事故年度报告越来越多地关注各种类型车辆的侧翻伤亡率及造成的财产损失。统计数据表明:2012年美国有561.5万车次交通事故,汽车侧翻事故占2.0%,但汽车侧翻伤亡人数占交通事故伤亡人数的20.3%[1]。在我国,据公安部统计,2013年发生的特大交通事故共16起,造成的伤亡人数高达219人,其中由于汽车侧翻引起的交通事故5起,造成的人员伤亡人数为77人。统计显示,由于汽车侧翻引起的人员伤亡比例高达35%。因此,汽车侧翻及防翻控制的研究逐渐受到人们的重视[2-4]。
汽车侧翻主要分为绊倒型侧翻和非绊倒型侧翻两大类[5]。绊倒型侧翻是指汽车行驶时由于路面障碍物或者路面不平度以及侧向风等引起的侧翻,此时汽车的水平侧向力不再与各车垂向轮载荷以及路面附着系数相关,仅仅与车速、障碍物尺寸以及风速相关。非绊倒型侧翻则是汽车在高速紧急的转向过程中由较大的侧向加速度引起的侧翻。目前国内外对非绊倒型汽车侧翻的研究较多:金智林等[6]研究了汽车侧翻预警算法,基于侧翻预警设计了防侧翻控制策略;褚端峰等[7]运用滑模控制方法设计了半主动悬架的汽车防侧翻控制器;Larish等[8]结合驾驶员转向输入提出了一种有预测能力的侧翻评价指标,应用CarSim软件及实验进行了分析和验证;Yoon等[9]进行了防侧翻的汽车集成底盘控制研究,设计了一种人车闭环系统的底盘集成控制算法,用虚拟测试实验进行了验证。ADAMS作为一款多体动力学仿真软件,在汽车相关的仿真中能够有效地降低人车实验的危险性和成本,同时能仿真驾驶员差异性等因素的影响。李志刚等[10]运用ADAMS研究了微型客车急转弯的侧翻倾向,揭示了客车结构参数、行驶参数、外部工况对侧翻倾向性的影响;时晓杰等[11]基于ADAMS对汽车侧翻风险影响因素进行了正交试验,得到了影响因素的主次关系。虽然国内外对车辆本身结构与侧翻之间的关系有很多相关研究,但是对于驾驶员的操作与车辆侧翻之间关系的研究相对较少。
本文运用ADAMS仿真软件对驾驶员能够控制的车辆侧翻因素进行了仿真分析,定性地得出相关因素与汽车侧翻性能之间的变化规律,对汽车驾驶员的操作有着指导性意义,可为切实降低侧翻事故的发生率提供科学依据。
1 汽车侧翻模型及评价指标
1.1 多体动力学模型
为更加精确分析汽车侧翻过程的动态性能,基于Adams/Car模块化方法建立整车多体动力学模型。根据某SUV的特性状况,建立前悬架、后悬架、转向系统、制动系统及车身等子模块的模型,然后将整车重心位置及惯性矩等难以直接获取的参数设置为可修正参数。多体动力学模型如图1所示。设置前后悬架为双横臂式,其余参数设置如表1所示。
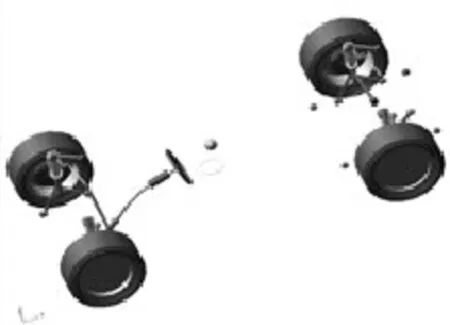
图1 多体动力学模型

表1 某SUV车参数
1.2 侧翻评价指标
为理论分析汽车侧翻的评价指标,将汽车简化为侧倾平面模型,如图2所示。

图2 侧倾平面模型
汽车在转向时会产生侧向加速度

式中:v为侧向速度;u为纵向行驶速度;R为转向半径。
考虑到汽车左右两侧动力学特性的对称性,假设汽车向左转弯,则左侧车轮载荷减小,右侧车轮载荷增加,对右侧车轮与地面的接触点取矩,则力矩方程为

其中:m为整车质量;tw为轮距宽度;hCG为汽车重心高度;FL为左侧车轮的垂向载荷。
当力矩平衡时,总力矩为0,则

可以看出:当侧向加速度足够大时,左侧车轮垂向载荷变为0,即左侧车轮离地。侧向加速度由纵向速度和转弯半径直接决定,因此控制好方向盘转角和行驶速度能有效防止侧翻。
根据上述分析,引入汽车侧翻研究中常用的侧翻评价指标,即横向载荷转移率 LTR(lateral load transfer ratio)来评定汽车的侧翻。

式中:FLF,FLR,FRF,FRR分别为左前轮、左后轮、右前轮、右后轮的垂向载荷,可在ADAMS/Car分析中直接输出。
当横向载荷转移率LTR的绝对值小于1时,汽车未侧翻;当LTR绝对值等于1时,认为汽车处于侧翻的临界状态;当LTR绝对值大于1时,认为汽车已经侧翻。
2 典型工况仿真分析
考虑到驾驶员实际操作中的复杂性,很难完全模拟各种情况下驾驶员操纵车辆行驶的路径。选取侧翻试验中的典型行驶工况——“鱼钩”行驶工况(fish-hook)和正弦转向工况(swept-sine steer)——进行汽车侧翻性能分析。其中“鱼钩”行驶工况是由美国NHTSA针对汽车的侧翻稳定性而提出的试验工况,主要用于检验车辆在极限转弯工况下的侧翻稳定性。正弦转向工况可用来研究和评价转向频率对汽车侧翻性能的影响。实验汽车主要参数如表1所示。
2.1 Fish-hook工况
汽车在标准侧翻实验的fish-hook工况运行,设置仿真初始车速为30 m/s,方向盘转角为180°,转向速率为50(°)/s。观察各个车轮的垂向载荷随时间的变化曲线及横向载荷转移率曲线。改变仿真的初始车速,当横向载荷转移率绝对值最大值正好等于1时,记录此时车速为侧翻临界车速。
图3和图4为方向盘转角为180°,转向速率为50(°)/s,初始车速为36.9 m/s时的仿真结果。可以看出:当汽车运行到5 s左右时,右前轮和右后轮垂直载荷为正好为0,横向载荷转移率为1,表明汽车右侧车轮离地,达到临界侧翻危险状态。

图3 fish-hook工况车轮垂直载荷

图4 汽车在fish-hook工况的横向载荷转移率
改变方向盘转角,保持方向盘转向速率为50(°)/s时,获得方向盘转角在50°~300°范围内的汽车侧翻临界速度,从而得到侧翻临界速度与方向盘转角关系,如图5所示。

图5 侧翻临界速度与方向盘转角关系
同理,改变方向盘转角速率,保持方向盘转角幅值为180°,得到汽车侧翻临界速度与方向盘转速关系,如图6所示。

图6 侧翻临界速度与方向盘转速的关系
从图5和图6可以看出:在转向速率一定的情况下,方向盘转角越大,侧翻临界速度越小,且方向盘在小转角范围内变化时临界速度变化明显,而当方向盘转角一定时,侧翻临界速度随着转向速率的增大而减小。因此,方向盘转角越大,驾驶员操纵方向盘的速度越快,则汽车越容易发生侧翻。
2.2 Swept-sine工况
为研究方向盘转向频率对汽车侧翻性能的影响,选择swept-sine的方向盘转角输入,分别得出各个车轮的垂向载荷随时间的变化曲线及横向载荷转移率随时间的变化关系,如图7、8所示。可以看出:当汽车运行到7.7 s左右时,左前轮和左后轮垂直载荷为正好为0,表明汽车左侧车轮离地,且横向载荷转移率为-1,汽车达到临界侧翻危险状态,此时的汽车侧翻临界车速为36.1 m/s。

图7 swept-sine工况车轮垂直载荷

图8 汽车在swept-sine工况的横向载荷转移率
分别改变方向盘的转向频率和转角幅值,获得不同方向盘转角幅值,得到汽车发生侧翻的临界速度与转向频率之间的关系曲线,如图9所示。

图9 侧翻临界速度与转向频率关系
从图9可以看出:当转角幅值一定时,汽车侧翻临界车速随转向频率的增加而增大;当方向盘转向频率一定时,侧翻临界速度随着方向转角幅值的增大而减小。即汽车发生侧翻危险时,需要驾驶员有灵敏的反应速度和驾驶经验,快速地以小幅值调节方向盘,可降低汽车侧翻危险。
3 结论
1)单方向操作时,驾驶员操纵方向盘的速度越快,方向盘转角越大,则汽车侧翻临界速度越小,即汽车越容易发生侧翻。
2)汽车发生侧翻危险时,需要驾驶员有灵敏的反应速度和驾驶经验,快速、反复地以小幅值调节方向盘,可降低汽车侧翻危险。
[1]National Highway Traffic Safety Administration,Traffic safety facts 2012:a compilation of motor vehicle crash data from the fatality analysis reporting system and the general estimates system [R].Washington:Department of Transportation,2014:77-85.
[2]金智林,马翠贞,张甲乐,等.采用电控液压制动系统的SUV防侧翻鲁棒控制[J].重庆理工大学学报:自然科学版,2014(1):1-6.
[3]来飞.客车侧倾及侧翻安全性综合评价方法[J].客车技术与研究,2014(3):5-7,12.
[4]陈毅华,徐健康,毛建国,等.基于TTR的汽车侧翻预警研究[J].重庆理工大学学报:自然科学版,2014(7):11-14,54.
[5]徐中明,于海兴,伍小龙,等.车辆侧翻指标与侧翻风险因素分析[J].重庆大学学报,2013,36(3):25-31.
[6]金智林,张鸿生,马翠贞.基于动态稳定性的汽车侧翻预警[J].机械工程学报,2012,48(14):128-133.
[7]褚端峰,李刚炎.半主动悬架汽车防侧翻控制研究[J].汽车工程,2012,34(5):399-402.
[8]Larish C,Piyabongkarn D,Tsourapas V,et al.A new predictive lateral load transfer ratio for rollover prevention systems[J].IEEE Transactions on Vehicular Technology,2013,62(7):2982-2936.
[9]Yoon J,Cho W,Kang J,et al.Design and evaluation of a unified chassis control system for rollover prevention and vehicle stability improvement on a virtual test track[J].Control Engineering Practice,2010,18(6):585-597.
[10]李志刚,沈明,邹猛,等.基于多体动力学的微型客车急转弯侧翻倾向性仿真[J].清华大学学报:自然科学版,2010,50(8):1286-1289.
[11]时晓杰,何杰.基于ADAMS/CAR的车辆侧翻风险因素研究[J].公路交通科技,2014,31(10):130-133.