基于模糊ARTMAP神经网络农用汽车助力转向系统控制
2015-11-28王玲
王玲
陕西职业技术学院,陕西西安710100
基于模糊ARTMAP神经网络农用汽车助力转向系统控制
王玲
陕西职业技术学院,陕西西安710100
针对农用汽车电动助力转向系统非线性较强、稳定性较差等问题,基于模糊ARTMAP神经网络,建立农用汽车电动助力转向系统控制模型,对电动助力转向系统中的驱动力矩和助力力矩进行控制,利用matlab仿真软件进行分析。分析结果表明,随着驱动力矩的增加,助力力矩逐渐增加,但是增加的趋势先增加后减小;驱动和助力力矩的目标值与仿真值在仿真初期存在一定的差异,随着时间的增加,两者差异逐渐减小直至为零;设计的基于模糊ARTMAP神经网络的控制系统,控制精度较高,稳定性较好,可以满足要求。
模糊ARTMAP神经网络;农用汽车;助力转向系统;控制
随着能源的日益紧缺和大气环境的不断恶化,以零污染排放且不依赖石油能源等双重优点的纯电动汽车成为了国内外学者的研究热点,电动助力转向(EPS)作为电动汽车一个重要系统之一较传统液压助力转向具有更好的助力特性和燃油经济性,因而有逐渐替代液压助力转向的趋势。汽车电动助力转向可以根据行驶工况改变转向传动比,从而提高汽车的操纵稳定性。随着党和国家领导人对农业问题的重视及社会的不断发展,农业机械化是个必然的趋势,基于此,对农业机械的研究也逐渐成为一个重要的趋势[1,2]。
国内外众多学者对电动汽车及其各系统进行了相关的研究。其中,于蕾艳等[3]对汽车线控转向系统动力学进行分析,并基于神经网络非线性模型对线控转向系统控制算法进行了研究;王军年等[4]基于AMESim软件建立了四轮独立驱动电动汽车动力学仿真模型,对模型进行联合仿真并进行试验验证;郝亮等[5]在介绍EPS结构和工作原理的基础上,对EPS的核心组成部分(ECU)的控制方法与优化进行研究;裴学杰等[6]在分析了电动助力转向系统各组成部分数学模型的基础上,构建了基于Simulink与carsim的动助力转向系统仿真模,对电动助力转向系统助力特性进行了研究;R.Chabaan[7]对电动力转向系统的增益调度和最优控制进行了分析。
虽然国内外众多学者对汽车及其各系统进行了相关的研究,但对于EPS控制的研究相对较少,再加之EPS控制系统非常复杂。因此,针对农用汽车电动助力转向系统非线性较强、稳定性较差等问题,本文基于模糊ARTMAP神经网络,建立农用汽车电动助力转向系统控制模型,对电动助力转向系统中的驱动力矩和助力力矩进行控制,为后续农用汽车电动助力转向系统的控制研究和稳定性的提高提供一定的参考。
1 农用汽车电动助力转向系统组成及非线性模型
农用汽车电动助力转向系统(EPAS)是一个反馈控制系统,其通过电荷放大器将驾驶员方向盘的转向力矩输入给车辆,从而提高驾驶员的舒适性和操作稳定性。EPAS由方向盘、转向柱、减速机构、助力电动机和齿轮齿条转向器等主要机构组成如图1所示。
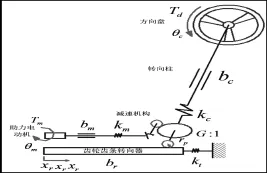
图1 电动助力转向系统结构及模型Fig.1 Structure and model of electric power steering system
根据图1所示模型,建立3自由度的EPAS非线性模型为:

式中:Td、Tm分别为驾驶员驱动力矩和助力电机力矩;kc为转向柱刚度;bc为转向柱阻尼;km为电机和减速器系统扭转刚度;Jm为电机转动惯量;Jc为转向柱转动惯量;bm为电机和减速器系统阻尼;m为齿轮齿条转向器质量;br为齿条阻尼;G为减速比;rp为齿轮半径;kt为车轮弹簧刚度;θc为转向柱转角;为转向柱角速度;xr为齿条位移;为齿条线速度;θm为助力电机转角;为助力电机角速度;fc、fr、fm为非线性摩擦模型。
2 模糊ARTMAP神经网络模型
模糊ARTMAP(Fuzzy Adaptive Resonance Theory Map)根据模糊子集计算和ART神经网络类别选择方法中的形式相似性,同时结合了ART和模糊逻辑的优点。模糊ARTMAP神经网络系统由两个模糊ART[8]模型构成,即ARTa和ARTb,它们由一个内部ART模型连接,也叫映射域,其逻辑结构图如图2所示。
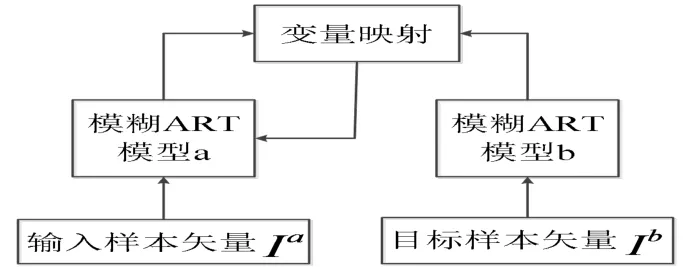
图2 模糊ARTMAP神经网络逻辑结构Fig.2 Fuzzy ARTMAP neural network logic
2.1 输入矢量预处理
模糊ARTa模型接受电动助力转向系统的输入信号并进行分类,若待分类为N维样本,分类后有M个类别。设输入ARTa的样本矢量为:。对a进行互补编码归一化,可以得到:。对每个输入,恒有:。
目标样本ARTb的输入矢量为:,且。对b作互补编码归一化得到目标样本ARTb的输入B。矢量a、b一般成对输入。
2.2 初始化网格
对ARTa用表示F1a的输出矢量,表示F2a的输出矢量,表示第J类在ARTa中的权重矢量。同理可得,对ARTb用表示F1b的输出矢量,表示F2b的输出矢量,表示第K类在ARTb中的权重矢量。对映射。对映射域abF,一般用表示abF的输出矢量,用表示的第J个节点到Fab的权重矢量。
模糊ARTMAP神经网络的初始化包括设置选择参数α>0、学习速率参数、警戒门限参数、匹配跟踪参数ε(的值很小),设置权重矢量初始值为:

2.3 搜索获胜节点和判断谐振状态
对于每个输入矢量I(由A和B组成),其在F2层节点j的输出值,可以通过相关的函数计算得到,其计算函数为:

选择在F2层竞争获胜节点的函数为:

选择的类别被标识为J,如果有多个Tj同时为最大值,则选择索引最小的类别。如果

同时成立的时,说明此时的节点J竞争获胜并发生匹配谐振,则可以得到;当式(5)不成立时,则该节点复位,即abbx=y,再在剩下的其他节点中继续收索获胜节点,进而对其谐振状态进行判断;当式(5)成立,而式(6)不成立时,则匹配跟踪开始,aρ在的基础上增加匹配跟踪参数ε,同时在新的警戒参数下,继续在F2a中搜索获胜节点,如果经过反复循环依然没有找到这样的获胜节点,则关闭F2a对输入描述的记忆,在输入端馈入下一个输入模式。
2.4 学习更新权值矢量


3 仿真结果与分析
根据上文建立的控制模型,利用matlab仿真软件进行分析,仿真分析结果如下文所示。
图3为助力力矩与驱动力矩之间的关系曲线。由图3可以看出,随着驱动力矩的增加,助力逐渐增加,但是增加的趋势先增加后减小。
图4为不同速度下助力力矩与驱动力矩之间的关系曲线。由图4可以看出,在不同的速度下,随着驱动力矩的增加,助力逐渐增加,但是增加的趋势先增加后减小。当车速为v=60 mph时,增加趋势最小;车速为4 mph<v<30 mph时,其增加趋势大于车速v=60 mph;车速为v=4 mph时,其增加趋势大于车速4 mph<v<30 mph;当车速为v>60 mph时,增加趋势最大且变化也较大。
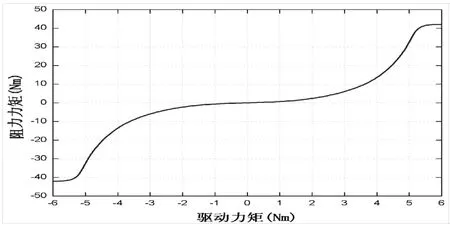
图3 助力与驱动力矩曲线Fig.3 Curve of power steering torque and drive torque
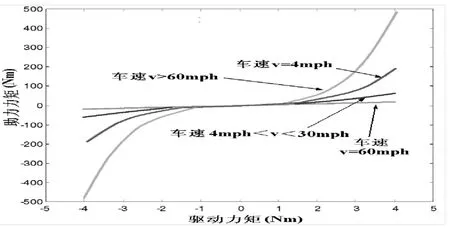
图4 不同速度下助力与驱动力矩曲线Fig.4 Curves of power steering torque and drive torque at different speeds
图5为驱动力矩仿真值。由图5可以看出,驱动力矩的目标值与仿真值在0到2 s存在一定的差异,随着时间的增加,两者差异逐渐减小直至为零,说明本文设计的基于模糊ARTMAP神经网络的控制系统,控制精度较高,稳定性较好,可以满足要求。
图6为助力力矩仿真值。由图6可以看出,助力力矩的目标值与仿真值在0到8 s存在一定的差异,随着时间的增加,两者差异逐渐减小直至为零,说明本文设计的基于模糊ARTMAP神经网络的控制系统,控制精度较高,稳定性较好,可以满足要求。
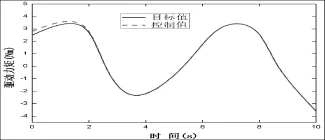
图5 驱动力矩仿真值Fig.5 Simulation values of driving torque
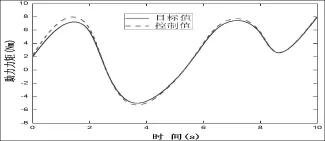
图6 助力力矩仿真值Fig.6 Simulation values of power steering torque
4 结论
本文基于模糊ARTMAP神经网络,建立农用汽车电动助力转向系统控制模型,对电动助力转向系统中的驱动力矩和助力力矩进行控制,利用matlab仿真软件进行分析,分析结果表明:
(1)随着驱动力矩的增加,助力逐渐增加,但是增加的趋势先增加后减小;
(2)驱动和助力力矩的目标值与仿真值在仿真初期存在一定的差异,随着时间的增加,两者差异逐渐减小直至为零;
(3)设计的基于模糊ARTMAP神经网络的控制系统,控制精度较高,稳定性较好,可以满足要求。
[1]蒋家荣.浅析影响农用汽车操纵稳定性的因素及评价方法[J].安徽农学通报,2011,10:209-210
[2]侯南,张文多.农用汽车动力电池故障诊断系统的探索与研究[J].农机化研究,2013,11:24
[3]于蕾艳,伊剑波,鲍长勇.基于神经网络非线性模型的线控转向系统控制[J].拖拉机与农用运输车,2014,41(2):37-40
[4]王军年,王庆年,宋传学,等.四轮驱动电动汽车差动助力转向系统联合仿真与试验[J].农业机械学报,2010,41(6):7-13,30
[5]郝亮,孙剑,郭涛,等.汽车EPS控制策略和控制方式[J].汽车工程师,2014,5:20-23
[6]裴学杰,杨世文,季茜.电动助力转向系统助力特性研究[J].汽车实用技术,2014,3:51-53
[7]Chabaan R.Optimal Control and Gain Scheduling of Electrical Power Steering Systems[C]//IEEE Vehicle Power and Propulsion Conference,Dearborn,MI,2009
[8]Gail A C,Stephen G,David B R.Fuzzy ART:Fast Stable Learning and Categorization of Analog Patterns by an Adaptive Resonance System[J].NeuralNetworks,1991(4):759-771
Control of Power Steering Systems ofAgricultural Vehicles Based on Fuzzy ARTMAPNeural Network
WANG Ling
Shanxi Vocational and Technical College,Xi'an 710100,China
For the problems of nonlinear,the poor stability of electric power steering system of agricultural vehicle,the control model of the electric power steering system of agricultural vehicle was established based on the fuzzy ARTMAP neural network to control the torque of driving torque and power steering torque,the analysis was used by matlab simulation software.The analysis results show that with the increase of the driving torque,power steering torque increase gradually,but the increase trend of first increases then decreases;the target value and simulation value of driving torque and power steering torque at the beginning has certain differences,with the increase of time,both difference decreases to zero;design of control system based on fuzzy ARTMAP neural network of high control precision,good stability can meet the requirements.
Fuzzy ARTMAP neural network;agricultural vehicles;power steering systems;control
U469.79
A
1000-2324(2015)03-0418-04
2013-04-12
2013-04-28
王玲(1977-),女,汉族,陕西省西安市人,电路与系统,硕士,讲师,研究方向:嵌入式技术应用.
