AMT自动离合器控制技术的发展与展望*
2015-11-22王志勇乔居斌杨宏伟
□ 王志勇 □ 乔居斌 □ 杨宏伟
滨州学院 机电工程系 山东滨州 256600
AMT自动离合器控制技术的发展与展望*
□ 王志勇 □ 乔居斌 □ 杨宏伟
滨州学院 机电工程系 山东滨州 256600
电控机械式自动变速器(AMT)与液力式自动变速器(AT)相比,具有传动效率高、制造成本低、动力性好等优点,尤其是AMT能够满足大型拖拉机、城市公交车和重型车辆对动力传递的要求,同时降低驾驶员的劳动强度。离合器自动控制技术已经成为机械式变速器实现自动控制的关键技术,以自动变速器的主要技术发展趋势为研究背景,对AMT自动离合器的结构、执行机构、关键技术、控制技术等进行了综述,分析了AMT自动离合器的现状和发展方向。
电控机械式自动变速器 拖拉机 自动离合器 控制技术
作为传动系的一部分,离合器起着传递或者中断动力的作用。对于装有传统机械式变速器(MT)的汽车,驾驶员在汽车起步或者换挡时需踩下和视情况松开离合器踏板,从而完成起步或换挡过程。为了降低驾驶员的劳动强度,自动离合器应运而生。
自动离合器是在传统机械式离合器基础上加装电子控制系统实现的,利用电控技术实现了离合器的自动控制,自动离合器控制系统主要由传感器、电子控制单元和执行机构组成。在传统固定轴式齿轮变速器的基础上,将离合器、发动机转速控制机构及选换挡机构用电子控制单元进行控制,通过对离合器、换挡机构和发动机油门开度的协调控制实现自动变速。图1所示为自动变速器的工作原理图,通过发动机、自动离合器与传统机械式变速器的协调配合,可实现半自动化的换挡操作,驾驶员可直接操纵挡杆换挡,离合器自动完成分离和接合,无须踩踏离合器和考虑换挡过程中加速踏板与离合器的配合等问题。
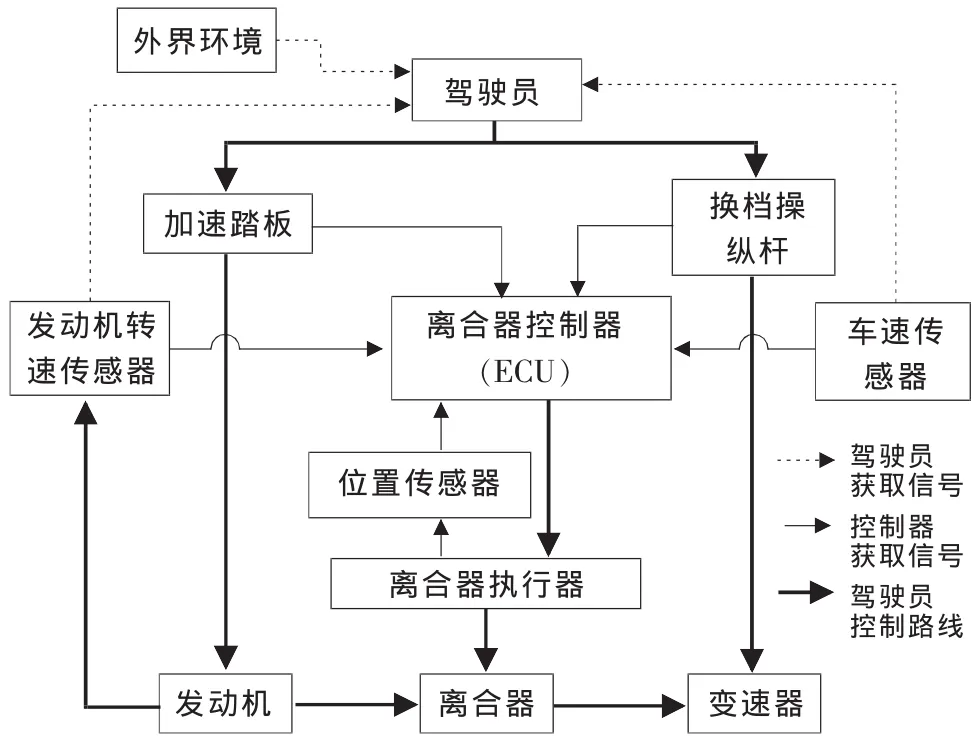
▲图1 自动离合器工作原理图
相对于其它自动变速器,AMT具有成本低、制造工艺简单、传动效率高等优点,既保留了传统机械式变速器传动效率高、燃油经济性好等优点,又具有液力自动变速器(AT)操控简便、换挡舒适等优点,可显著降低驾驶员的劳动强度,确保行车安全。尤其是能够更好地满足重型车辆和大型拖拉机对动力传递的要求,因此AMT具有很大的发展潜力。
1 AMT自动离合器的发展现状
最早的自动离合器出现在20世纪30年代,它利用与加速踏板联动的控制阀和进气管的负压实现对真空伺服式离合器的操纵。40年代,离心式自动离合器出现,当发动机达到一定转速,在离心力的作用下离合器接合,汽车自动起步。50到60年代,出现了电磁粉式自动离合器,它的效果比离心式好,但接合仍然不够平稳,性能改善也受到限制[1]。
80年代后,随着电子控制技术的不断发展,自动离合器的控制性能不断提高。微处理器的处理速度和灵活性不断提高,因此制造出了性能优良的电控伺服系统,逐步实现了离合器的精确控制。美国的Ford、Eaton,日本的Isuzu、Nissan,欧洲的Scania、Volvo、Fiat、Ranault、ZF等均开展了此方面的研究[2~4]。
表1所示为国外自动离合器及AMT主要研发情况,其中,德国ZF公司开发的Astronic自动变速器,以及意大利Mganeti Marelli公司用于法拉利赛车上的SelespeedSystem系统都应用了自动离合器。
我国对AMT的研究工作起步较晚,经过三十多年的努力,在自动离合器的关键技术上已经取得了一定的突破,但在技术研究和实际应用方面和国外还有很大差距。表2所示为国内自动离合器研发情况,其中,吉林大学在理论研究方面取得了很多成果,并针对不同车型进行了装车试验。北京理工大学主要针对重型车辆进行了研究[5]。哈尔滨宏泰伟业科技有限公司针对轿车研发的ACS(Automatic Clutch System)已经实现产业化。
目前,国内许多单位在进行自动离合器的相关研究,大多数主要针对轿车等轻型汽车,对客货车等大型车辆离合器自动控制的研究相对较少。
在离合器自动控制策略方面,Fischer、Braun、Sugimura、Karihara[6]等通过检测节气门开度、离合器从动盘和发动机的转速差以及离合器位置反馈进行闭环控制;葛安林[7]提出了模糊评判思想,建立了最优模型;Tanaka等[8]运用模糊控制技术取得了较好的效果;申水文等[9]将模糊控制、PID控制、专家Fuzzy控制以及分级智能控制进行了发展;雷雨龙[10]在20世纪90年代研究了发动机恒转速起步控制的方法,有效地降低了汽车起步过程中离合器的磨损,但没有考虑车辆的平顺性。
近年来,国内外对AMT自动离合器的研究更加深入,其中:姜凤翔[11]对离合器起步控制和磨损补偿进行了研究;戴丰[12]基于驾驶员意图对AMT离合器的控制方法进行了相关研究;刘海鸥等分别对自动离合器执行机构进行了控制研究分析;王印束[13]基于动力传动系统一体化技术对离合器控制进行了研究。
在当今对车辆燃油经济性和排放要求越来越高的情况下,电控机械式自动变速器已成为世界各国汽车企业开发的热点,并相继推出各自的研究成果和产品。
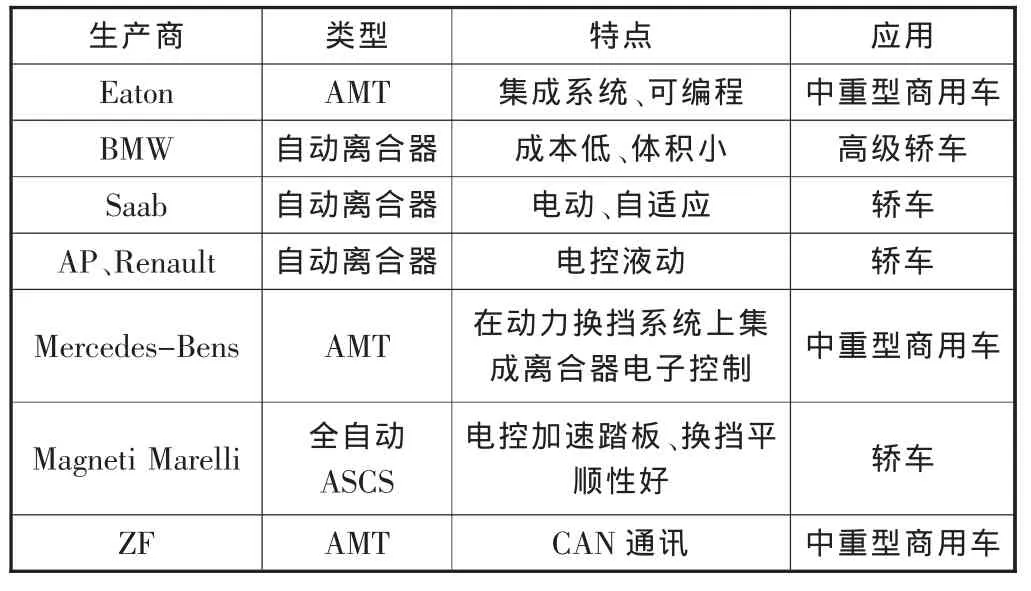
表1 国外自动离合器及AMT主要情况

表2 国内自动离合器研发情况
2 自动离合器研究的关键技术
自动离合器的控制是比较复杂的综合控制问题,车辆的行驶环境变化多端,人的操纵意图适时而变,如何根据环境的变化和驾驶员的意图,适时地与传动系统进行配合,提高换挡品质,如何提高离合器的接合性能和实现最佳接合规律,是离合器控制仍然面临的主要困难,其关键技术包括以下几个方面。
2.1 驾驶员意图的辨识[14]
由于AMT中取消了离合器踏板,驾驶员的驾驶意图只能通过操纵加速踏板和制动踏板来表达,因此识别驾驶员真正的操纵意图具有一定困难。通过加速踏板等输入信息来识别驾驶意图,是实现离合器自动控制的关键。
2.2 工况的识别
汽车行驶过程中的气候、负载及道路条件是不断变化的,因此对离合器的控制不能一成不变。滑摩功是离合器主、从动盘在接合过程中通过摩擦片滑动摩擦所做的功,离合器接合过程中冲击度和滑摩功的控制是相互矛盾的。对多变工况进行识别,是保证离合器自动控制系统良好适应性的前提。
2.3 智能控制策略
离合器的控制受道路条件、车辆载荷、驾驶员意图等多方面的影响,离合器接合过快,会造成冲击度过大,乘坐舒适性就会变差,传动系统磨损加大[15]。如果离合器接合过慢,起步滑摩的时间就会变长,传动效率会降低,离合器会出现温度升高过快,容易导致离合器磨损过快甚至烧坏。因此,需要采用合适的智能控制策略来提高对环境的适应能力,提高控制品质。
2.4 综合控制技术
在传动系统中,离合器不是孤立存在的,必须与变速系统和发动机共同协调实现车辆的动力传递,为提高汽车的经济性、舒适性、安全性和寿命,必须对动力传递系统进行综合分析和协调控制。汽车动力传动系统一体化技术是根据驾驶员的意图和车辆的工况,根据适当的换挡规律、离合器接合规律,采用相应的执行机构对车辆的整个动力传动系进行联合控制,使传动系统更加平稳地工作。由于换挡前后变速齿轮的传动比是变化的,因此换挡过程中必然会产生一定的冲击。为了减小冲击,必须对发动机转速和转矩进行控制,对发动机、离合器和变速器进行综合控制,是提高汽车换挡品质、改善车辆平稳性和延长离合器寿命的关键。
2.5 执行机构
离合器执行机构是控制系统的直接控制目标,执行机构的响应性能直接影响到AMT的工作品质和工作可靠性[16]。在硬件开发方面,仍然需要研究执行机构的响应特性、位置反馈和补偿问题,设计出体积小、响应快、性能稳定、可靠性高的自动离合器执行机构。
总之,由于离合器接合过程的不确定因素较多,因此目前仍然没有建立起较完善的模型对其进行分析,对自动离合器的研究有待进一步深入。
3 自动离合器执行机构的分类
按照执行机构动力源的不同,自动离合器可分为电控-气动、电控-液动和电控-电动三种类型[1][17]。
3.1 电控-气动离合器[18]
电控-气动式离合器的执行机构以压缩空气作为动力源,离合器的分离与接合是通过气缸推动离合器分离拨叉从而推动分离轴承实现的。电控-气动离合器具有成本低、无污染的优点,但是控制精度低,响应速度较慢,在带有空气压缩泵的大型商用车上使用较多。
3.2 电控-液动离合器
电控-液动式离合器具有结构简单、响应速度快、吸收冲击的能力强及占用空间小等优点,但是在利用高速开关阀控制离合器的系统中,离合器的执行机构中液压油的黏度会随温度的改变发生变化,温度降低,油黏度变大,离合器的接合速度会变慢,导致汽车起步时换挡品质差,液压元件对加工精度的要求较高。
3.3 电控-电动离合器
随着电子技术的发展,电机控制技术的应用越来越广,图2所示为电控-电动自动离合器原理图,电控-电动离合器执行机构以直流伺服电动机为动力源,利用蜗轮蜗杆、丝杠螺母等将旋转运动转化为直线往复运动,实现离合器的控制。自动变速控制系统中要控制的节气门、离合器以及选换挡装置均可以使用电动机作为执行器。
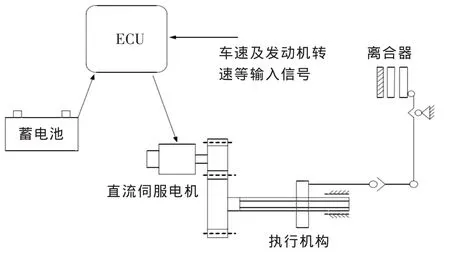
▲图2 电控-电动自动离合器
但是电机的反应速度较慢,国内外在采用电控-电动自动离合器时,普遍采用增加弹簧助力装置的方法,提高执行器的响应速度。
近年来,在离合器的自动控制系统中,人们开始采用易于控制、精度更高的电机,使系统的结构更加简单,控制精度进一步提高,并且具有较好的适应环境能力。近年来,电控-电动自动离合器的研究应用越来越广泛。
4 控制技术
在离合器控制系统中,控制目标一般是接合量和接合速度,由于离合器控制系统和执行机构工作环境变化大,以及系统本身存在的非线性化、变参数、时滞干扰等问题,因此如何实现满意的控制仍然是自动离合器控制技术开发的主要课题。
随着自动控制技术的发展,离合器的自动控制技术也在不断发展,其控制技术由古典控制理论的应用发展到现代控制理论,现在正向智能控制方向发展[19]。
4.1 动态闭环控制
为了提高动力性及自动换挡的品质,在自动换挡过程中采用发动机反馈控制和中央同步控制等控制方式,控制离合器主、从动片的转矩差和转速差,从而减少换挡过程的冲击和离合器的滑摩,提高换挡品质。
4.2 模糊控制
模糊控制的优点是不需要建立被控对象的精确数学模型,只需获得人工经验知识及操作数据便可对系统进行控制。模糊控制系统的鲁棒性强,适用于非线性、时变及大时滞系统[20]。由于自动离合器和变速系统存在时变、非线性、时滞等特性,很难建立精确的数学模型。采用模糊控制可以将熟练驾驶员的经验形成控制语言规则,通过模糊推理,即可获得精确的控制信号。通过模糊控制将优秀驾驶员的起步、换挡经验运用到AMT车辆,可以提高换挡平顺性,减少不必要的换挡,从而延长离合器的使用寿命。
4.3 自适应控制
当外界条件出现急剧变化,车辆受到的外界干扰较大时,一般的反馈控制系统往往会出现不能正常工作的情况。而自适应控制可以利用改变系统参数或控制作用的方法使被控系统仍然按某一性能指标继续以最佳状态运行。采用电控液压操纵的AMT系统中的液压油受温度影响较大,换档过程也会因此受到影响,采用自适应控制可以提高电控液压系统对温度的适应能力,提高换挡品质。
4.4 神经网络控制
神经网络是从仿生学的角度出发,通过模拟人类大脑神经系统的工作方式,使机器具有类似人脑的感知、学习和推理能力的控制策略。神经网络具有较强的自适应能力,具有自主学习和适应严重不确定性系统的动态特性;同时系统具有较强的鲁棒性和容错能力[21,22]。采用神经网络控制策略后,TCU可以通过学习优秀驾驶员的换档经验,以及专家知识形成的良好换挡规律,使自动离合器的控制与优秀驾驶员的操纵过程相似。
5 发展
由于拖拉机及重型车辆本身动力学特性十分复杂,离合器工作过程中负载条件、道路条件、气候条件和磨损情况是多变的,而且离合器接合过程存在相互矛盾的评价指标,既要平稳又要减少磨损,所有这些都使离合器的控制问题复杂化,目前自动离合器仍然存在换挡冲击、响应滞后和控制不良等缺陷。
在自动离合器控制系统中,离合器的接合时机、接合品质、复杂工况行驶时的自适应性等性能有待进一步提高,通过对人-车-环境、动力系统一体化控制、控制策略、执行机构的响应特性等问题进行综合研究,提高了系统的响应速度和准确性,设计出接合品质好、自适应能力强、便于维修的控制机构,仍然是今后自动离合器的发展方向。
[1]胡川.汽车AMT自动离合器控制算法研究及快速控制原型系统开发[D].武汉:华中科技大学,2007.
[2]赵志强.湿式双离合器自动变速器建模及仿真分析[D].长沙:湖南大学,2009.
[3]任玉平.基于模糊控制的AMT选换档系统开发[D].长春:吉林大学,2003.
[4]陶林.自动离合器电动执行机构控制研究[D].重庆:重庆大学,2010.
[5]席军强,丁华荣,陈慧岩.ASCS与AMT的历史现状及其在中国的发展趋势[J].汽车工程,2002,24(2):89-93.
[6]H Westendorf,EKS-the Electronic Clutch System[Z]. Interior Report of Fichtel&Sachs AG,1992:37-40.
[7]葛安林,吴锦秋,郭万富.离合器最佳接合规律的研讨[J].汽车工程,1998,9(2):54-65.
[8]H Tanaka,H Wada.Fuzzy Control of Clutch Engagement for Automated Manual Transmission [J].Vehicle System Dynamics,1995,24(3):365-376.
[9]申水文,张建武.车辆机械式离合器的模糊控制技术[J].控制理论与应用,1998(12):981-984.
[10]雷雨龙.提高电控机械式自动变速器性能的研究[D].长春:吉林工业大学,1998.
[11]姜凤翔.电控机械式自动变速器起步控制与磨损补偿[D].重庆:重庆大学,2004.
[12]戴丰.基于驾驶员起步意图的AMT控制方法研究[D].上海:上海交通大学,2012.
[13]王印束.基于动力传动系统一体化的双离合器自动变速器控制技术研究[D].长春:吉林大学,2012.
[14]张学锋.基于目标油门开度预测的AMT汽车起步控制[D].重庆:重庆大学,2012.
[15]Braun,Automotive Mechanical Transmission Start Control System[P].USA Patent:5097724,1992-03-24.
[16]周云山,钟勇.汽车电子控制技术[M].北京:机械工业出版社,2004.
[17]孙冬野,秦大同.基于环境变化的离合器起步补偿控制[J].农业机械学报,2005(3):8-11.
[18]高立程.离合器自动控制技术及其在EPS系统中的应用[D].大连:大连理工大学,2012.
[19]于亚杰.基于仿真技术的液压自动离合器控制策略研究[D].长春:吉林大学,2006.
[20]申水文,葛安林.模糊换挡技术与综合换挡规律[J].农业工程学报,1997(7):145-149.
[21]秦贵和,葛安林,魏达,等.电控自动变速器档位决策神经网络方法[J].兵工学报,1997,18(1):80-83.
[22]李永军.电控机械式自动变速器起步过程的智能控制[D].长春:吉林工业大学,1997.
[23]刘战芳.自动离合器的发展现状与前景[J].城市车辆,2007(3):54-56
(编辑 日 月)
华中数控在机器人部件领域取得突破
华中数控在高端制造领域已经有了一定突破,在机器人的关键部件如控制系统、驱动装置、伺服电机等已具有自主研发核心竞争能力,六轴多关节机器人目前已经广泛应用于焊接、拼装、喷涂、搬运等领域。
该公司基于华中8型高档数控系统的基础上推出针对3C行业的高速钻攻中心数控系统,在用户现场已成功完成对零件的加工,实现了国产数控系统在3C领域的重大突破。2015年该公司将继续开拓3C领域业务。
华中数控一直在关注机器人的发展动态,目前该公司在机器人业务的战略布局上已有一定的考虑,并已设立两家机器人子公司,即深圳华数机器人有限公司和重庆华数机器人有限公司。
该公司也在持续关注德国的工业4.0、美国的CPS和中国政府推动的中国制造2025,公司在数控技术应用领域和向智能装备发展上作了积极应对,包括研制华中8型、切入机器人等。同时,该公司目前还与华中科技大学联手开发新一代智能化数控系统关键模块,未来也会逐步运用到产品中,以提升公司核心竞争力。
(智 财)
TH132.41
A
1000-4998(2015)04-0082-04
*滨州学院青年人才创新工程(编号:BZXYQNLG201205)
2014年10月