激光投线仪光线自动调节设备与算法
2015-11-12陈寒松吴天成周建忠徐苏强
陈寒松,吴天成,周建忠,盛 杰,徐苏强
(江苏大学机械工程学院,江苏镇江212013)
激光投线仪光线自动调节设备与算法
陈寒松,吴天成,周建忠,盛杰,徐苏强
(江苏大学机械工程学院,江苏镇江212013)
激光投线仪是工程中用于标定基准线的精密测量仪器,目前其光线校准工作较为费时且精度受控性较差.为了能较快较准地调校光线,使之满足各项精度要求,在对现有激光投线仪调校原理与结构深入研究的基础上,对激光投线仪的机芯结构进行了改进,构建了一套以工控机为控制核心的光线调校系统,该系统使用伺服电机控制光线调节螺栓的旋进与旋出,调整激光线的位置,并采用线阵CCD实现光线位置的快速检测,使其快速调校到设定值.利用PID控制算法与模糊控制算法,结合Matlab仿真软件对光线水平度调节进行仿真对比,仿真结果表明:PID控制算法程序设计简单,调节时间短,但存在比较大的超调,对控制对象参数变化比较敏感,鲁棒性差;模糊控制算法无超调,调节过程平缓,对控制对象参数变化不敏感,鲁棒性好,较适用于光线调节系统.
激光投线仪;光线调校;线阵CCD;PID控制;模糊控制
doi∶10.3969/j.issn.1671-7775.2015.06.009
激光投线仪是一种新型的激光类小型测绘测量仪器,广泛应用于机械加工、家具制造、建筑装潢等相关领域,市场前景广阔.激光投线仪可以在墙面等被射物体表面投射出可见的水平直线和铅垂直线,起到标定基准线的作用.激光投线仪在出厂前需经过严格的光线校准,对激光光线的直线度、垂直度和天顶的位置度等指标进行检测与调整.传统的激光直线调节方式需要在足够远的距离处放置对应的校准标靶,将激光直线投射到各个标靶上,通过闭路监视系统将画面汇集到显示器后,由人眼判断光线的各项精度是否满足要求,若存在偏差,则手动调整光线调节螺栓,使光线达到各项精度要求[1],此方法主要依赖于工作人员的经验,且容易因工作时间过长而导致调节精度不准.因此,研究人员开始尝试采用线阵CCD(charge-couPled device)的光线检测技术[2],实现校准自动化.路杰等[1]、刘海波等[3]设计一套基于线阵CCD光线检测装置,使光线检测的精度大大提高,且受人为因素的影响大大减小,刘盼盼等[4]采用平行光管角度测量与机器视觉测量结合的方法,设计了一台激光投线仪多维校准系统.上述装置均采用人工调节与视觉检测相结合的方式,自动化程度不高.
基于上述问题,文中对激光投线仪的机芯结构进行改进,使其适用于光线自动化调节,设计和搭建一套基于工控机的光线自动调校设备,并对其核心控制算法进行仿真与试验验证,实现光线调节的自动化.
1 激光投线仪光线调节设备结构
1.1机芯结构
文中激光投线仪选用光源为635 nm激光二极管,可以投射出可见的红色水平直线和铅垂直线.机芯结构如图1,2所示.

图1 光线调节机构图

图2 机芯结构图
激光二极管封装在激光头中,激光头安装在调节片内,并通过调节螺栓与机芯连接,调节片中间的凹槽与机芯上的半圆凸起部分连接.2个位置调节螺栓的进退带动调节片上下摆动,调整光线的位置;调节片左右两端的角度调节螺栓与激光头的凹槽内壁接触,一个旋进,一个旋出带动激光头转动,从而调节光线的角度.
1.2光线调节设备设计
激光投线仪机芯安装在工位转台上,螺栓调节部分采用伺服电机与扳手相连接,通过电机的正反转来调节螺栓的旋进与旋出,分别驱动安装激光头的调节片绕支点旋转以及激光头在调节片上旋转,以达到调剂激光光线角度和位置的目的.伺服电机安装在上位机构上,在装卸机芯和转换调节工位时,扳手与调节螺栓分离,在调节光线时,上位机构带动电机移动,使扳手与调节螺栓接触.每根光线的调节需要4个伺服电机,左右两侧的电机用于调节光线的水平度,调节片正前方的2个电机用于调节光线的位置.
光线检测过程中,水平光线采用位于同一水平线上的2块线阵CCD进行检测,机芯正前方的CCD检测光线的位置,机芯左边的CCD与正前方的CCD检测光线的水平度(与2个CCD上基准位置的差值即为水平度);垂直光线采用位于同一垂直线上的2块线阵CCD进行检测,摆放位置与检测水平光线的方式相同,放于同一垂直线上[1].这里以检测水平光线为例进行说明,CCD(正)放于光源正前方,用于检测光线的上下位置,CCD(左)用于检测光线的水平度,CCD(左)与CCD(正)之间的间隔为2.5 m,2个CCD离光源距离为5 m,2个CCD上的基准值记为H左基准,H正基准,实际光线在2个CCD上的反馈值为H左,H正,光线检测示意图如图3所示.图4为激光投线仪光线调节设备搭建图.

图3 光线检测示意图

图4 激光投线仪光线调节设备搭建图
2 电气控制系统
2.1硬件系统
激光投线仪光线自动调校系统采用工控机为控制核心,以运动控制卡、模拟量卡、数字量卡、线阵CCD和相应的端子板组成信号输入、输出模块.其电气控制系统框图如图5所示.
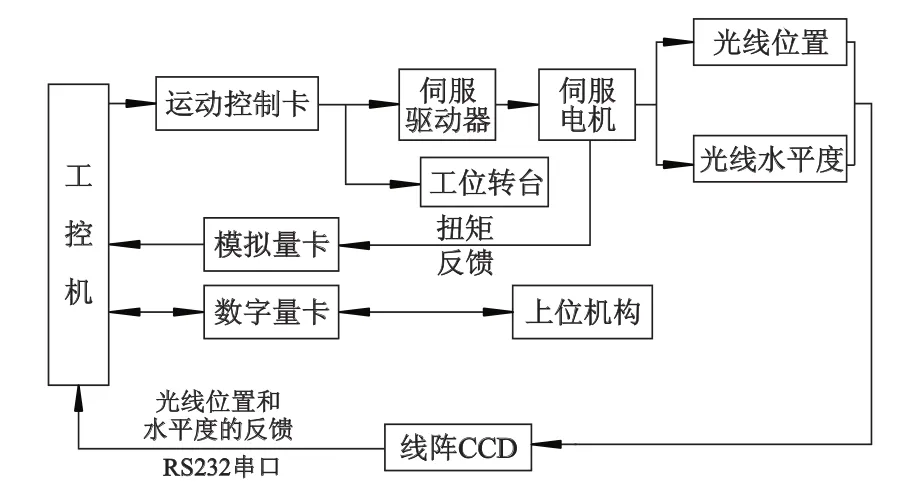
图5 硬件系统组成
运动控制部分以研华PCI-1240四轴运动控制卡对伺服电机进行控制,伺服电机选用松下A5系列伺服电机,采用位置控制模式的方式接线.以研华PCI-1220两轴运动控制卡对工位转台进行控制,工位转台采用步进电机,通过涡轮蜗杆传动来实现工位的转换,当激光投线仪机芯上一工位的激光头光线调节完毕后,工位转台旋转90°进行下一工位的激光头光线的调节.
对各轴扭矩的采集使用研华PCI-1710模拟量卡,由于光线调校中不仅对光线的各项精度有要求,对各调节螺栓最终的扭矩也有要求,需大于规定值,所以本系统必须对各调节螺栓的扭矩进行反馈.由于电机与扳手直接通过联轴器连接,所以电机的扭矩值接近各调节螺栓的扭矩值,PCI-1710模拟量卡能够把各轴扭矩实时的反馈到工控机上.对上位机构的控制采用研华PCI-1760数字量卡,该数字量卡有S位数字量输出功能,可控制上位机构的上下位,使调节扳手与光线调节螺栓接触或分离.
线阵CCD采用TOSHIBA公司的TCD1501D型,该器件是一种高灵敏度、底暗电流、6 000像元的二相线阵CCD,像元之间的间距为7μm.
2.2控制软件
为了使控制界面直观、友好,选用Visual C++作为系统控制软件的开发工具[5].软件中包含6个模块,分别是电机扭矩反馈模块、光线位置和角度反馈模块、光线轨迹可视化模块、电机控制模块、光线自动调节模块及上位机构控制模块.开机后,工控机先自行监测,然后初始化显示主界面,初始化工作主要包括∶各种变量、运动控制卡、模拟量卡和数字量卡的初始化以及各电机轴当前状态的显示[6].
软件结构框图如图6所示.其中,光线位置和水平度反馈模块、电机扭矩反馈模块和光线自动调节模块为软件的核心模块.

图6 软件结构框图
2.2.1光线位置和水平度反馈模块
激光投线仪光线自动调校系统中光线位置的采集使用线阵CCD,并通过RS232串行通讯传输到工控机上[1,7],软件界面的光线位置反馈模块中,显示的是水平光线实际位置值H左,H正,基准值H左基准,H正基准,实际位置与基准值的差值△H左,△H正;垂直光线实际位置值H上,H正,基准值H上基准,H正基准,实际位置与基准值的差值△H上,△H正.
2.2.2光线自动调节模块
在光线调节前,需进行基准的标定,选用各项精度满足要求的激光投线仪机芯为基准,在2个CCD上显示的值分别定义为H左基准,H正基准,在后续的光线自动调节中,投线仪光线在CCD上的反馈值分别为H左,H正,以此H左基准,H正基准为目标值进行调节,调节后△H正,△H左控制在±2 mm,则可视为达到精度要求,光线调节的流程图如图7所示.
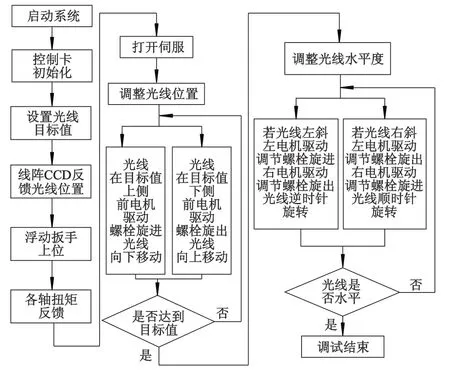
图7 光线自动调节流程图
3 光线水平度调节算法原理及设计
3.1算法的选择
光线调节的效率和精度主要是靠控制器与执行机构顺序动作的精准配合实现,所以对控制器算法的选择尤为重要.PID算法具有较强的现场调节的适应性能,程序编制简单,工程上便于实现,且参数调整方便,在光线的调节中有其独到的优势.模糊控制算法在智能控制领域理论研究比较成熟、实现相对容易,且不需要精确的数学模型,鲁棒性强.由于调节系统存在一定的机械误差和几何误差,且光线位置的变化具有非线性,其控制对象无法精确地建立数学模型,所以模糊控制算法在光线的调节中也有其一定的优势,下面针对这2种算法进行仿真对比.
3.2PID控制算法设计
普通的增量型PID控制算法[S]为


式中∶KP,KI,KD分别为比例、积分、微分系数;e(k),e(k-1)和e(k-2)分别为第k,k-1,k-2次采样时的偏差值;u(k)为第k次采样时的控制器输出值;TI为积分时间常数;TD为微分时间常数;T为采样周期.
结合实际工程经验,本系统采用PI控制器进行试验.
3.3模糊控制算法设计
模糊控制器由数据模糊化处理模块、数据模糊推理模块以及数据逆模糊化处理模块3个部分组成.将模糊控制器的输入取为左边CCD反馈值H左和H正的变化率,输出取为电机的给定脉冲量,因此,模糊控制器选用双输入单输出的二维模糊控制器[9].
取H左的语言变量为E,论域为X={-4,-3,-2,-1,0,1,2,3,4},将模糊论域划分为E={NB,NS,ZO,PS,PB},分别表示当前误差为“光线向左倾斜,倾斜角度大”、“光线向左倾斜,倾斜角度偏大”、“正常位置”、“光线向右倾斜,倾斜角度偏大”、“光线向右倾斜,倾斜角度大”.
取H左的变化率的语言变量为EC,论域为Y={-4,-3,-2,-1,0,1,2,3,4},将模糊论域划分为EC={NB,NS,ZO,PS,PB},分别表示当前误差变化率为“光线逆时针快速旋转”、“光线逆时针较快旋转”、“不变”、“光线顺时针较快旋转”、“光线顺时针快速旋转”.
取电机的给定脉冲量为控制量u,其语言变量为U,论域为Z={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},将模糊论域划分为U={NB,NS,ZO,PS,PB},分别表示电机的脉冲数为“左电机脉冲数给正脉冲数,右电机脉冲数给负脉冲数,且给定量大”、“左电机脉冲数给正脉冲数,右电机脉冲数给负脉冲数,且给定量较大”、“角度正好,电机不转”、“左电机脉冲数给负脉冲数,右电机脉冲数给正脉冲数,且给定量较大”、“左电机脉冲数给负脉冲数,右电机脉冲数给正脉冲数,且给定量大”.
综合考虑VC++中编程的简明性和实际运行的工程应用性,决定采用三角分布的隶属度函数作为此模糊控制器的隶属度函数.考虑激光投线仪实际应用工况,对隶属度函数进行调整后,得到模糊控制的模糊化结果[10],如表1-3所示.

表1 模糊变量E,EC的隶属度赋值表

表2 模糊变量U的隶属度赋值

表3 模糊控制规则表
在光线调节过程中,先离线计算出模糊控制查询表,然后根据线阵CCD的反馈值,计算出H左值E和H左值的变化率EC,接着通过查询模糊控制查询表获得电机给定脉冲量U,再乘以比例因子,即可计算出具体的脉冲数[11].
4 算法仿真
结合调节系统中的几何位置关系和机械传动关系,忽略机械误差和几何误差,得到系统的数学模型∶

式中∶y是所给脉冲数;y0是电机转1圈所需的脉冲数,设定为10 000;l是调节螺栓的进给量;P为螺栓的螺距,为1 mm;H为CCD上光线的实际位置;λ为螺栓的进给损失系数,值为0.025;r为激光头凹槽半径,为5.2 mm;θ为光线转动的角度;R为CCD之间的间距,为2.5 m;ΔH为线阵CCD上光线所移动的距离.

图8 PID控制仿真模型

图9 模糊控制仿真模型
在PID控制系统中,对有超调量和无超调量时的比例与积分参数进行试凑[12],选取其中的3个参数,得到的曲线如图10所示.

图10 K P,K I参数的比较图
从图10中可以看出,有超调量时,参数KP=4,KI=0.4的超调量较小,且时间短,无超调时,调节时间较长,效率较低.故PI控制的比例、积分系数选用KP=4,KI=0.4较合适.其中横坐标是仿真时间t,纵坐标是H左值.
在模糊控制系统中,因模糊控制存在稳态误差,故在模糊控制仿真模型中加入一积分环节,构成模糊与积分混合控制器[13],其控制仿真模型如图11所示,图12为未加积分环节的模糊控制和加入积分环节的模糊控制仿真曲线,由图可知,加入积分环节后可以满足光线调节要求.

图11 加入积分环节的模糊控制仿真模型

图12 2种模糊控制阶跃响应曲线
由于在光线调节过程中误差、系统的时变性和非线性等因素的影响,系统的控制对象模型是不准确的,模型参数会变化,所以在控制对象模型参数变化引起的模型失配情况下再进行上面的仿真,如图13,14所示,其中模型增益、滞后时间常数和惯性时间常数均失配+20%[14],PID控制和模糊控制中的其他参数不变.

图13 标称模型与模型失配时的PID控制阶跃响应曲线

图14 标称模型与模型失配时的模糊控制阶跃响应曲线
在标称模型时,由图10,12可以看出,PID控制算法的上升时间短,调节时间较短,在35 s可以达到目标位置,但超调量比较大,若改变积分、微分参数,把响应曲线调节到无超调情况下,则调节时间较长,大概在50 s可以达到目标位置;模糊控制算法无超调,调节过程较平稳,但上升时间和调节时间都较长,大概在3S s左右可以达到目标位置.两控制算法的调节时间相差不大,但模糊控制在抑制超调方面有优势.
在模型失配时,由图13,14可以看出,控制对象模型参数变化时,PID控制产生较大的超调,调节时间也变长,受模型参数变化影响很大,而模糊控制能够有效抑制超调,上升时间和调节时间也无明显变化,对模型参数变化引起的模型失配不敏感,具有较强的鲁棒性.
根据光线调节的实际需求,调节过程需要较为平缓,受工况变化的影响要小,且需较小的超调.综上所述,模糊控制能够基本满足系统的性能指标.
5 试验验证
文中的光线调节系统每次线阵CCD输出信号采集的时间间隔为0.5 s,并将每次调节后得到的位置误差输入至上位机中,采用模糊控制算法进行调节,在软件界面上对CCD的反馈值进行采集,如图15所示.

图15 模糊控制的试验数据采集
H左的起始位置为3.0mm,基准位置为25.0mm.由图15可知,起始时刻光线处在偏离基准位置的状态,通过模糊控制器的闭环控制,经过16 s左右,使光线调节到误差范围内,实现了光线自动调节.
6 结 论
1)对现有激光投线仪机芯结构进行了改进,使其装配与调节更便捷,并适用于光线自动化调节.
2)在光线调节系统的机械结构和软硬件构成方面深入研究的基础上,搭建了一套适用于激光投线仪光线自动调节的装置和系统.控制部分以工控机为上位机,通过运动控制卡,控制伺服电机的转动来拧紧或拧松光线调节螺栓,可以方便快捷的调节光线的位置和水平度;检测部分采用线阵CCD检测光线,以串口通信方式把信号传输到上位机中,实时显示光线的位置和水平度,形成闭环控制回路.此系统的控制和检测方法弥补了人工调节的不足,快速准确的完成光线的调节工作,操作简单,在激光投线仪生产企业具有工业推广价值.
3)对光线调节的核心算法进行了研究,分别提出了PID控制算法和模糊控制算法,并用Matlab/ Simulink进行仿真.仿真结果表明∶PID控制调节时间较短,但存在比较大的超调,且对控制对象模型参数变化较敏感,鲁棒性差;模糊控制能够有效抑制超调,调节过程平缓但调节时间较长,而模糊控制无需精确数学模型,对被控对象参数变化不敏感,鲁棒性好,比较适用于此光线调节系统.试验结果也表明所设计的激光投线仪光线自动调节系统能够满足设计要求,实现了自动化调节.
(
)
[1]路 杰,杨博雄.基于多线阵CCD的激光投线仪数字化监测[J].计量技术,2012(12)∶50-53. Lu Jie,Yang Boxiong.Digitalmonitoring of laser beam line based on multi line array CCD[J].Measurement Technique,2012(12)∶50-53.(in Chinese)
[2]Li Fubao,Li Zhongke,LiQin.Research on linear array CCD laser vertical disPlacementmeasurement[J].Applied Mechanics and Materials,2012,121∶4095-4099.
[3]刘海波,贾敏强,杨博雄,等.基于CCD对激光投线仪进行校准的方法和装置的研究[C]//2006年全国测绘仪器综合学术年会论文集,2006∶121-123.
[4]刘盼盼,许流博,乐 意,等.激光投线仪的多维校准系统[J].光学精密工程,2014,22(6)∶14S6-1493. Liu PanPan,Xu Liubo,Le Yi,et al.Multi-dimensional calibration system for laser demarcation instrument[J]. Optics and Precision Engineering,2014,22(6)∶14S6-1493.(in Chinese)
[5]周晓云.程序设计基础—可视化及VC++实现[M].北京∶高等教育出版社,2004∶1-2.
[6]耿红涛,舒志兵.基于VC的多轴运动控制卡软件开发技术研究[J].机床与液压,2007,35(11)∶130-133. Geng Hongtao,Shu Zhibing.Investigation of the software exPloitation technic for a control system based on a multi-axismotion control card in VC[J].Machine Tool &Hydraulics,2007,35(11)∶130-133.(in Chinese)
[7]孙垂良,王保平,张 雄,等.基于FPGA的线阵CCD数据采集系统的设计[J].电子器件,200S,31(5)∶1447-1450. Sun Chuiliang,Wang BaoPing,Zhang Xiong,etal.Design of linear CCD data collecting system based on FPGA[J].Chinese Journal of Electron Deuices,200S,31(5)∶1447-1450.(in Chinese)
[S]余海生.微型计算机控制技术[M].北京∶清华大学出版社,1999∶S1-91.
[9]刘实现,朱 华,王 勇,等.基于模糊PID控制的乳化液液位控制系统设计[J].工矿自动化,2009(4)∶17-19. Liu Shixian,Zhu Hua,Wang Yong,et al.Design of control system of emulsion liquid level based on fuzzy-PID control[J].Industry and Mine Automation,2009(4)∶17-19.(in Chinese)
[10]曹志国,廉小新.基于Matlab的两种模糊控制系统的仿真方法[J].计算机仿真,2004,21(3)∶41-44. Cao Zhiguo,Lian Xiaoxin.Two kinds of fuzzy control system simulation methods based on matlab[J].Computer Simulation,2004,21(3)∶41-44.(in Chinese)
[11]诸 静.模糊控制原理及应用[M].北京∶机械工业出版社,2001∶225-236.
[12]谢仕宏.MATLAB R200S控制系统动态仿真[M].北京∶化学工业出版社,2009∶151-154.
[13]朱良红,王勇初.模糊与积分混合控制器[J].华侨大学学报∶自然科学版,2003,24(3)∶2S5-2S9. Zhu Lianghong,Wang Yongchu.Fuzzy and integral mixed controller[J].Journal of Huaqiao Uniuersity∶Natural Science,2003,24(3)∶2S5-2S9.(in Chinese)
[14]李冬生.水泥回转窑煅烧系统温度模糊控制算法研究[D].秦皇岛∶燕山大学电气工程学院,2010.
(责任编辑 祝贞学)
EquiPment and algorithm of automatical light adjustment for laser demarcation device
Chen Hansong,Wu Tiancheng,Zhou Jianzhong,Sheng Jie,Xu Suqiang
(School of Mechanical Engineering,Jiangsu University,Zhenjiang,Jiangsu 212013,China)
∶As a Precision measuring instrument widely used in several workPlaces to calibrate reference lines,the light calibration of current laser demarcation device is time-consuming with Poor Precision.In order to calibrate the lightquickly and meet the accuracy requirements,the structure of laser demarcation device was imProved to design an automatical light adjusting system with industrial comPuter as control core according to the lucubrating numerous light calibrating theories,methods and system.The linear CCD was used to realize raPid detection of lights,and several servomotorswere used to screw adjusting screws in and out to calibrate the laser lights quickly and Precisely.PID algorithm and fuzzy control algorithm combined with Matlab simulation software were used to conduct simulation comParison of light calibration.The simulation results show that the design of PID control is simPle with short setting time,while it is more sensitive to Parameters change of object with over shooting and bad robustness.The adjusting Process of fuzzy control is smooth with small overshooting,and it is not sensitive to Parameters change of objectwith good robustness.Fuzzy control algorithm is suitable to light calibration.
∶laser demarcation device;light adjustment;linear CCD;PID control;fuzzy control
TH164
A
1671-7775(2015)06-0666-07
陈寒松,吴天成,周建忠,等.激光投线仪光线自动调节设备与算法[J].江苏大学学报∶自然科学版,2015,36(6)∶666-672.
2015-01-21
江苏省科技支撑计划项目(BE2013097);江苏高校优势学科建设工程项目
陈寒松(197S—),男,广西桂林人,博士研究生(chenhs0701@sina.com),主要从事激光制造技术及其应用的研究.
周建忠(1964—),男,江苏无锡人,教授,博士生导师(通信作者,zhoujz@ujs.edu.cn),主要从事先进制造技术的研究.
