一种适用于低信噪比条件的高精度频率估计方法
2015-10-13陈永森
徐 磊,陈永森
(1.中国船舶重工集团公司第723研究所,扬州225001;2.中国重工海博威(江苏)科技发展有限公司,扬州225001)
0 引 言
雷达在对目标进行探测时,目标速度是一项重要的参数,一种确定速度有效的方法是动目标检测(MTD)技术,即对一定数量的信号脉冲回波数据在慢时间上做快速傅里叶变换(FFT),然后确定目标的多普勒频率,解算目标速度,其测频精度依赖于脉冲数量。基于FFT谱分析的MTD技术运算速度快,而且对噪声不敏感,但因为栅栏效应和加窗截断,当真实频率和FFT量化通道的频率值不重合时,会产生频谱泄漏,动目标多普勒频率值落在两相邻量化谱线之间,致使检测结果无法满足测频精度要求[1]。
为了提高频率估值精度,国内外学者提出了多种基于FFT频率谱的插值算法。目前常用的传统插值算法有:单线相位法[2]、KAY 法[3]、Rife法(双线幅度法)[4]、Quinn法(结合幅度相位法)[5]等。其中,Rife法和Quinn法相对简单而且计算量小,在实际工程中应用较广。
本文首先分析了动目标检测技术的原理和不足之处,然后对FFT算法、Rife算法、Quinn算法的性能进行了分析[6],指出尽管Quinn算法插值时综合了幅度和相位信息,但在信噪比低的条件下依然无法克服存在插值方向性错误的难题。文献[7]~[8]给出一种较为完善的估计方法,但在信噪比低且真实频率值充分接近量化谱线位置时,依旧存在插值方向性错误的问题,而且仅仅用固定值频移还存在较大误差。针对此情况,本文给出一种全通道估计精度都较高的综合频率估计方法,并将其应用到大时宽带宽发射信号对目标速度的检测中。
1 雷达动目标检测技术
动目标检测技术是一种雷达对运动目标测速的有效手段。MTD采用带通滤波处理,通过带通滤波器组对雷达信号的回波进行处理,再对各个滤波器的输出进行检测进而发现运动目标[9]。
目前,MTD所用的滤波器组多利用FFT算法实现,N点FFT形成的N个带通滤波器均匀分布在零到雷达脉冲重频区间内,运动目标因速度不同而使雷达回波信号的多普勒频率有差异,从而多普勒频率将分布在频率轴上的不同位置,从0#~(N-1)#通道输出。N个滤波器的时域输出为:

滤波器的频率响应为:

式中:fr为雷达的脉冲重频,fr=1/Tr;n为滤波器编号,第n号滤波器的峰值位于f/fr=n/N,1±n/N,2±n/N,…处。
滤波器组频域响应示意图如图1所示。
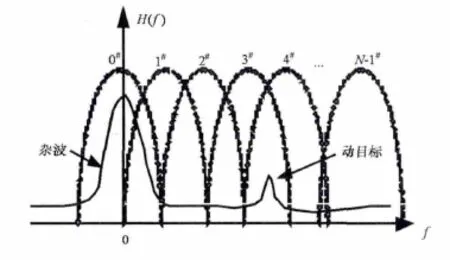
图1 滤波器组频域响应示意图
MTD处理是对雷达回波信号的数据矩阵作纵向FFT处理,其二维矩阵数据处理示意图如图2所示。在MTD处理中可根据频谱图中峰值的坐标来确定运动目标的多普勒频率,解算出运动目标的速度。其测速精度严重受到脉冲数量的制约,随着脉冲数量的增加精度提高,但是脉冲数量增加到一定程度会引发距离徙动,如图3所示。
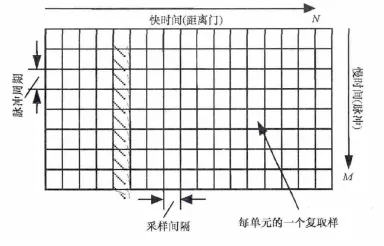
图2 二维矩阵数据处理示意图

图3 运动目标距离徙动示意图
2 信号模型
混有均匀功率谱高斯白噪声的单点频信号一个采样周期内的实数域表达式为:

式中:A为点频信号的幅度;f0为点频信号的频率;φ0为点频信号的初始相位;Fs为采样频率;N为采样点数;v(n)为均值为零、方差为2σ2的均匀频谱高斯白噪声。
x(n)的N点快速傅里叶变换记为X(k),因为实数序列的快速傅里叶变换具有对称性,所以在估计频率时只需关注频谱的前N/2点,在一个采样周期内:

式中:T为信号的采样周期;V(k)为高斯白噪声v(n)的快速傅里叶变换;在频谱图中峰值为X(k0),即最大的谱线值为X(k0)。
3 频率估计
3.1 传统频率估计算法
(1)Rife算法[6]
针对FFT估值精度差的问题,文献[4]提出了利用频谱图中2根相邻谱线的幅度进行点频信号频率估计的计算公式:

式中:X(k0)为最大谱线值,当X(k0+1)≤X(k0-1)时,r=-1;当X(k0+1)≥X(k0-1)时,r=1。
Rife算法在无噪声条件下估计性能良好,但现实中这种零噪声环境不存在,适度信噪比条件下,当真实频率fc位于2根离散谱线的中心区域时,Rife算法估计精度较高,其估值误差远小于直接FFT算法。在低信噪比条件下,当fc位于离散谱线附近时,因噪声影响插值估计时容易产生方向性错误,使估计误差更加恶化,其误差大于直接FFT算法。
(2)Quinn算法[5]

在零噪声的理想条件下,X(k0-1)和X(k0+1)是反相的,在较低信噪比条件下比Rife算法对插值方向的判断精准,但是在较低信噪比且待估频率fc充分接近量化谱线位置时Quinn算法也难以克服插值方向性错误的难题。
3.2 综合频率估计方法


图4 综合频率估计流程图

4 计算机仿真分析
4.1 仿真参数设计
对FFT算法、Rife算法、Quinn算法和本文所提算法分别进行计算机仿真。仿真参数设置:雷达发射信号拟采用线性调频信号(脉压后看作点频信号),信号频率400MHz,时宽20μs,带宽5MHz,采样频率10MHz,脉冲重频5kHz,脉冲数目64,初相为0~2π之间的随机值。对4种算法分别做100次Monte Caro仿真实验。
4.2 算法仿真分析
仿真说明:脉冲数目取64,则MTD处理后脉冲重频被等间隔量化为64份。分别在信噪比为0dB、-10dB、-20dB时进行仿真实验,仿真图横轴为动目标回波的实际多普勒频率,以0.01倍量化值步进0.5个量化通道,无量纲;纵轴为频率估计值相对真实值的均方根误差,代表测频精度,其单位为Hz。信噪比为0dB、-10dB、-20dB时半个通道的测频精度仿真图如图5~图7所示。

图5 SNR为0dB频率估计精度曲线

图6 SNR为-10dB频率估计精度曲线
从仿真图5~图7可知,本文所提的频率估计方法在半个通道内的测频精度明显优于传统方法,而且随着信噪比的降低并没有严重恶化,精度依旧平稳。

图7 SNR为-20dB频率估计精度曲线
5 结束语
本文所提的综合频率估计方法在整个频段测频精度较高,而且有较强的噪声容忍性。通过计算机仿真得到了验证。可以满足雷达对动目标速度检测的高精度要求,希望可以对工程实现带来帮助。
[1]黄玉春,黄载禄,黄本雄,等.基于FFT滑动平均极大似然法的正弦信号频率估计[J].电子与信息学报,2008,30(4):831-835.
[2]丁康,朱小勇.适用于加各种窗的一种离散频谱相位差校正法[J].电子学报,2001,29(7):32-36.
[3]Steven Kay.A fast and accurate single frequency estimator[J].IEEE Transactions on Acoustics Speech and Signal Proeessing,1989,37(12):56-62.
[4]Rife D C,Vincent G A.Use of the discrete Fourier transform in the measurement of frequencies and levels of tones[J].Bell System Technical Journal,1970,4(9):197-228.
[5]Quinn B G.Estimating frequency by interpolation using Fourier coefficients[J].IEEE Transactions on Signal Processing,1994,42(5):1264-1268.
[6]齐国清.几种基于FFT的频率估计算法精度分析[J].振动程学报,2006,19(1):86-92.
[7]谢胜,陈航,于平.基于FFT并二次修正的Rife频率估计算法[J].探测与控制学报,2010,32(4):48-53.
[8]马阳阳,李京华,张燕荣.基于FFT幅度和相位插值的频率估计改进算法[J].计算机与数字工程,2012,40(8):39-41.
[9]吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008.