六自由度并联机器人轨迹生成及实验研究
2015-10-12马国庆刘丽于正林曹国华
马国庆,刘丽,于正林,曹国华
(长春理工大学 机电工程学院,长春 130022)
六自由度并联机器人轨迹生成及实验研究
马国庆,刘丽,于正林,曹国华
(长春理工大学机电工程学院,长春130022)
为实现并联机器人运动轨迹的快速生成,提出了一种基于JPEG图像格式的运动轨迹快速生成方法,该方法可以快速地将图纸上路径轨转化为并联机器人预期路径。首先对JPEG图像格式文件的轨迹生成进行研究,然后用Matlab进行特征点提取及曲线拟合,通过仿真验证此方法的可行性。最后以H850六自由度并联机器人为研究对象,进行轨迹生成实验研究,验证基于JPEG图像格式的轨迹快速生成方法所生成轨迹的精确度。
并联机器人;轨迹生成;实验研究
并联机器人具有位姿精度高、累积误差小、动力性能好、刚度大、结构稳定、承载能力强等一系列优点,但并联机器人独特的结构也决定了其运动轨迹求解复杂,目前还没有一种统一的高速求解方法能够快速地完成轨迹生成[1]。对于简单规则轨迹,大多采用解析式来表达并联机器人末端执行器的运动轨迹,对于复杂轨迹,解析式的求解过程特别复杂,甚至存在无法用解析式来描述运动轨迹的现象,轨迹规划与优化更是无从谈起。即使复杂轨迹可以用解析式来表达,但生成轨迹的速度往往较慢,难以满足快速轨迹生成的要求[2]。针对以上问题,提出了一种基于JPEG图像格式的运动轨迹快速生成方法,该方法可以快速地将图纸上的路径转化为并联机器人的预期路径,有效地解决路径生成复杂且速度慢的问题,为并联机器人的轨迹规划以及运动控制奠定坚实的基础。
1 并联机器人结构简介
六自由度并联机器人由动平台、静平台实现上下平台的分层,达到整体的和谐性和美观性,二者靠六个支腿进行连接,可以通过控制支腿的伸缩运动达到对动平台姿态的有效控制[3,4]。
2 JPEG图像格式文件的轨迹生成方法
JPEG是比较常见的一种图像格式,被联合图片专家组命名为ISO10918-1[5,6]。JPEG文件比较先进的技术就是它的压缩技术,既能获得很高的压缩比又能形象生动的展现图像,又可以用很少的磁盘空间获得高质量的图像。而且JPEG很灵敏,可以对图像的质量进行调节,也可以对不同的压缩比进行压缩[7,8]。针对于此提出的基于JPEG图像格式轨迹快速生成方法,可以快速地将图纸上的轨迹路径转化为并联机器人的预期轨迹,采用简化SIFT算法对特征点进行提取,相关文献已经证明该方法的提取效果不受图像伸缩、旋转、光照的影响,能够在复杂背景下正确提取出描述物体本质的信息[9]。
特征点提取步骤如下:(a)利用高斯卷积构建简化后的高斯金字塔;(b)计算高斯残差金字塔;(c)在高斯残差金字塔中选择局部邻域内取得极值并大于阈值的像素点为特征点;(d)确定特征点的位置、尺度和方向[10]。对于曲线拟合方式,利用Matlab内置函数Polyfit可计算提取后特征点数据的n次最小二乘拟合多项式,使用Polyval函数来求取拟合次数,采用分段曲线拟合的方式来提高拟合精度。以下分别对规则曲线和不规则曲线的轨迹进行特征提取,验证该算法对两种曲线的拟合精度。
2.1规则曲线轨迹生成仿真
以规则曲线中星形线和椭圆为例,对载有星形线和椭圆的JPEG图像轨迹进行特征提取曲线拟合,验证基于JPEG图像的轨迹生成算法提取曲线的精度。
2.1.1星形线轨迹生成仿真

图1 拟合后星形线
图1(a)为一个以JPEG格式存储的星形线轨迹,利用Matlab图像处理工具箱将其读入到工作空间,并以数组形式进行保存。经过编程调试,获得图1(b)所示的特征点分布情况。特征点提取后,结合星形线的特征点的分布情况利用高阶曲线拟合功能,得到该星形线的的特征点拟合曲线如图1(c)所示,最终得到的星形线的拟合曲线如图1(d)所示,星形线的解析式如式(1)所示。

2.1.2椭圆轨迹生成仿真
与星形线类似,图2(a)为以JPEG格式存储的椭圆轨迹,图2(b)是获取的椭圆特征点分布。特征点提取后,结合椭圆曲线特征点分布情况利用高阶曲线拟合功能,得到该椭圆曲线的特征点拟合曲线如图2(c),最终得到的椭圆曲线的拟合曲线如图2 (d)所示,椭圆曲线的解析式如式(2)所示。

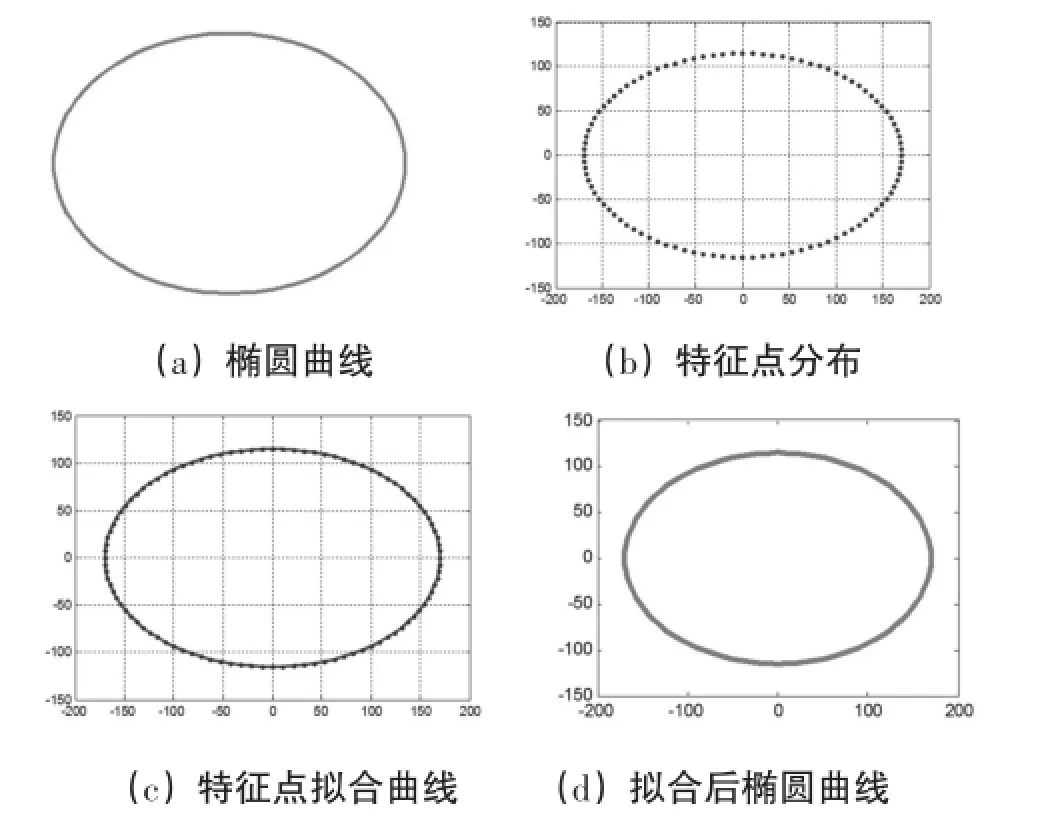
图2 拟合椭圆曲线
从上述拟合过程可以看出,对于规则轨迹曲线(星形线和椭圆),通过基于JPEG图像格式的特征提取拟合的方式得到的曲线完全满足精度要求。
2.2不规则曲线轨迹生成仿真
图3(a)所示是以JPEG格式存储的不规则曲线轨迹,利用Matlab的图像处理工具箱将其读入到工作空间,对其编程与调试,图3(b)为获得的曲线的特征点分布。结合不规则曲线特征点的分布情况利用高阶曲线拟合功能,得到该不规则曲线特征点的四次拟合曲线如图3(c)所示,五次拟合曲线如图3(d)所示,四次和五次拟合曲线的解析式如(3)所示。


图3 拟合后不规则曲线
将图3(c)和3(d)进行比较,不难得到,五次多项式拟合的残差分布较小,比较集中,清晰明了,且误差完全满足拟合精度要求。因此后续轨迹生成仿真及实验中的轨迹拟合都采用五次多项式拟合方式。
根据图1到图3的拟合过程可以看出,利用基于JPEG图像格式曲线轨迹生成方法提取的特征点及拟合的精度完全符合轨迹精度要求。
3 Matlab仿真实验
为验证基于JPEG图像格式的轨迹生成算法的精度,拟定如下的仿真实验过程:通过Matlab软件读入图4所示的载有期望轨迹的JPEG图像,提取其特征点分布如图5所示,将其数据保存到工作空间内,通过5次高阶曲线实现期望轨迹的拟合,将其作为末端执行器Z向的目标轨迹输入到SimMechanics模型中,通过比较期望位姿和实际位姿来确定运动精度,图6所示六自由度并联机器人运动序列。

图4 期望位姿曲线
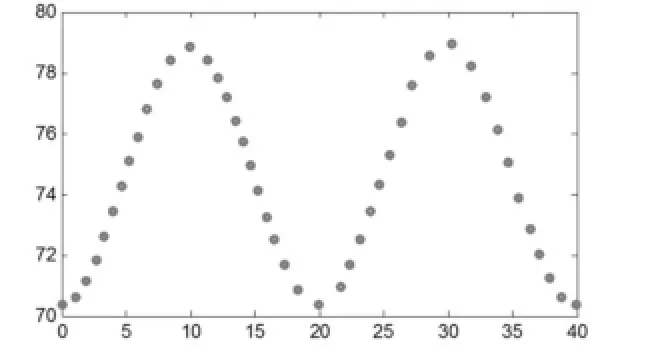
图5 期望位姿特征点分布

图6 六自由度并联机器人运动序列
在仿真的整个过程中,通过Simulink的虚拟示波器可以实时地显示出该并联机器人在运动的过程中各个支腿的期望运动轨迹、真实运动轨迹以及期望轨迹与真实轨迹之间的误差如图7所示。

图7 各支腿轨迹误差
通过图7可以看出,各个支腿的实际位移和期望位移在误差允许范围内,产生误差的原因主要来源于仿真过程中数据的截取误差,也就是误差为截断误差,因此所建立的模型完全可以达到运动精度要求。
4 并联机器人实物实验
实验系统由六自由度并联机器人、指令计算机、千兆以太网交换机、运动控制计算机、伺服控制器和激光跟踪仪组成。拟定如下实验过程:通过Matlab软件读入载有期望轨迹的JPEG格式图像,提取出特征点分布,将其作为目标位置输入到实验系统中,利用API Tracker3TM激光跟踪仪获得末端执行器的位置和姿态,通过比较期望位姿和实际位姿来确定运动精度。

图8 并联机器人轨迹生成实验系统结构图
4.1基于JPEG图像的轨迹生成
通过MATLAB软件读入图9所示的载有期望轨迹的JPEG格式图像文件,提取出特征点的分布,将其数据保存到workspace工作空间内,通过高阶曲线实现期望轨迹的拟合,将其作为目标位置输入到实现系统。

图9 目标轨迹
利用计算机控制方式实现对机器人运动控制,通过TCP/IP网络接口将机器人与运动控制计算机进行连接。最终搭建的基于JPEG图像格式的H850六自由度并联机器人轨迹生成实验系统如图10所示。
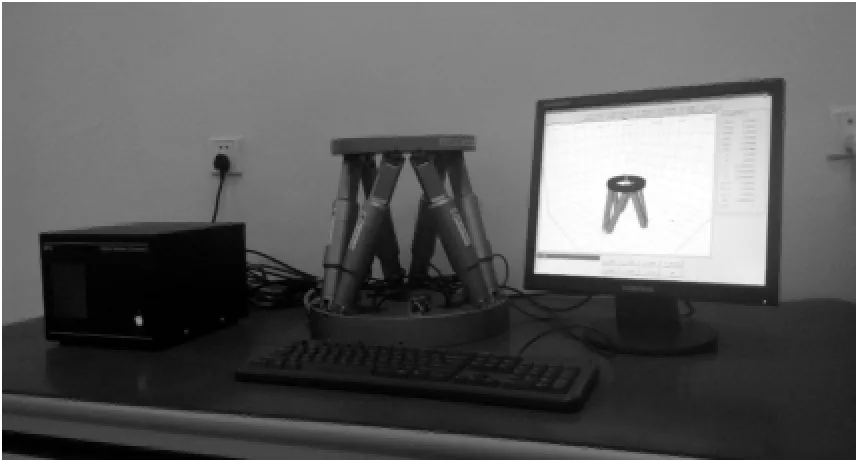
图10 六自由度并联机器人实验系统
因篇幅所限,在此只列出并联机器人在完成CUST中的字母C时所处的运动位姿序列,如图11所示。

图11 六自由度并联机器人运动序列

表1 读入JPEG图像上轨迹(X,Y) 离散点坐标

表2 激光跟踪仪测得运行轨迹(X,Y) 离散点坐标
4.2基于JPEG图像运动轨迹精度分析
利用Matlab读入JPEG图像上轨迹(X,Y)的离散点,如表1所示。使用API Tracker3TM激光跟踪仪测量六自由度并联机器人末端执行器在运动过程中的实际轨迹坐标(X,Y) ,如表2所示。根据表1中读入JPEG图像上轨迹(X,Y) 离散点的坐标以及表2中API Tracker3TM激光跟踪仪测得实际运行轨迹(X,Y) 离散点坐标之间的关系,可以得到期望位置和实际位置之间的误差关系,如图12所示。

图12 机器人期望位置和实际位置误差
由图12可知,API Tracker3TM激光跟踪仪测量得到的H850机器人末端执行器的实际轨迹和期望轨迹的基本吻合,完全符合机器人的运动精度要求,验证了所提出的基于JPEG图像格式的轨迹快速生成算法的可行性。但是实际轨迹与期望轨迹之间仍然存在一定的误差,产生误差的原因有以下几个方面:
(1)PI-H850并联机器人的固有误差造成了动平台末端执行器的输出误差
a)机器人各个支腿丝杠等零件的加工误差、装配误差、安装误差等;
b)球铰等运动副间的间隙;
(2)与检测设备相关的误差
a)API激光跟踪仪靶球的安装误差;
b)API激光跟踪仪检测精度决定的误差;
(3)使用方法产生的误差
a)计算过程中忽略支腿和球铰的细小间隙产生的误差;
b)基于JPEG图像格式轨迹拾取后拟合误差。
由于以上原因,在实际实验中不可避免会产生误差,在误差允许范围内,本文提出的基于JPEG图像格式的轨迹快速生成方法可以快速准确生产运动轨迹。
5 结论
为实现运动轨迹的快速生成,提出了一种基于JPEG图像格式的运动轨迹快速生成方法,该方法可以快速地将图纸上的路径转化为并联机器人的预期路径,该方法的可行性通过规则曲线和不规则曲线两种算例得到了验证,利用Matlab/SimMechanics工具箱完成H850机器人的机构建模,通过仿真验证基于JPEG图像的轨迹生成方法的可行性。
以H850六自由度并联机器人平台为研究对象,利用运动控制器提供的运动控制函数,以JPEG格式的图像为期望轨迹载体,进行轨迹生成实验研究。利用API激光跟踪仪检测H850机器人末端执行器的真实轨迹,将测得的真实轨迹与理论轨迹进行对比,分析产生误差的原因,验证基于JPEG图像格式的轨迹快速生成方法所生成轨迹精确度。
[1] 赵慧,韩俊伟,张尚盈,等.六自由度并联机器人运动学分析和计算[J].机床与液压,2009(3):70-72.
[2] 曲展龙.六自由度并联机构的仿真与结构优化[D].哈尔滨:哈尔滨工业大学,2013.
[3] Huang X,Liao Q,Wei S.Forward kinematics for a symmetrical Stewart platform using algebraic elimination[J].Mchanism and Machine Theory,2010,45 (2):327-334.
[4] 李立新,潘春萍,卢颖,等.六轴并联机器人控制软件的设计与实现[J].长春理工大学学报:自然科学版,2004,27(1):51-53.
[5] 张敏情,张炎,李德龙,等.基于新型校准表示的JPEG通用隐写分析算法[J].西安电子科技大学学报:自然科学版,2015,5(42):154-160.
[6] 李卓,陈健,蒋晓宁,等.基于多域特征的JPEG图像盲检测算法[J].浙江大学学报:工学版,2011,45(9):1528-1538.
[7] 朱婷婷,王丽娜,胡东辉,等.基于不确定性推理的JPEG图像通用隐藏信息检测技术[J].电子学报,2013 (2):233-238.
[8]Huang F J,Huang J W.Calibration based universal JPEG steganalysis[J].Science in China(Series F:Information Sciences).2009:52(2):260-268.
[9] 高健,黄心汉,彭刚,等.基于彩色的SIFT特征点提取与匹配[J].计算机工程与应用,2007,34(10):12-15.
[10] 高健,黄心汉,彭刚,等.一种简化的SIFT图像特征点提取算法[J].计算机应用研究,2008,7(25):2213-2222.
Trajectory Generation and Experiment Research of 6-DOF Parallel Robot
MA Guoqing,LIU Li,YU Zhenglin,CAO Guohua
(School of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022)
To achieve trajectory generation of the parallel robot,a trajectory rapid generation method based on JPEG image format was proposed,this method can quickly extract drawing feature points of the path into the expected path of parallel robot.Firstly used MATLAB for feature extraction and curve fitting,whose correctness and efficiency was verified by using simulation the feasibility of the path generation method based on JPEG image.Which saw the H850-6 DOF parallel robot as the object of study,path generation experiments based on JPEG image,precision was verified.
parallel robot;path generation;simulink
TP242
A
1672-9870(2015)05-0053-05
2015-07-10
吉林省科技发展计划项目(20140204058SF);吉林省光电检测装备工程实验室基金
马国庆(1988-),男,助教,博士研究生,E-mail:magq@cust.edu.cn
于正林(1971-),男,教授,博士生导师,E-mail:contribute-yu@126.com
