非道路车辆全向电动底盘四轮差速转向模型
2015-10-12朱振华吕琼莹王一凡丁洪韬
朱振华,吕琼莹,王一凡,丁洪韬
(1.长春理工大学 机电工程学院,长春 130022;2.中国科学院长春光学精密机械与物理研究所,长春 130022;3.爱荷华大学,爱荷华州 52240)
非道路车辆全向电动底盘四轮差速转向模型
朱振华1,吕琼莹1,王一凡2,丁洪韬3
(1.长春理工大学机电工程学院,长春130022;2.中国科学院长春光学精密机械与物理研究所,长春130022;3.爱荷华大学,爱荷华州52240)
提出的全向电动底盘可以实现四轮独立驱动和独立转向。在Akermann-Jeantand两轮转向模型的基础上,对全向电动底盘四轮差速转向数学模型进行了研究。建立了四轮差速转向过程中四个车轮之间的角度关系和速度关系,解决了全向电动底盘四轮差速控制过程中的关键问题。利用所建立的四轮差速转向数学模型可实现全向电动底盘的四轮差速转向控制。由四轮差速转向模型可以看出,四轮差速转向逆相控制模式可使转弯半径减小一半,这对于提高全向电动底盘的灵活性和操控性具有非常重要的意义。
全向电动底盘;四轮差速转向;数学模型;转向控制
非道路车辆也称非道路行走式机械,如装载机、挖掘机、叉车等。这些传统的非道路车辆一般采用柴油发动机,其尾气排放对环境造成了严重污染。为此开发了一种可用于非道路车辆的全向电动底盘,其总体结构如图1所示。
该全向电动底盘的四个车轮由四台电动机分别驱动,可以实现四轮独立驱动和独立转向,完全实现了零污染、零排放。以该全向电动底盘为基础,可以开发出多种形式的非道路行走机械。相对于传统汽车底盘,全向电动底盘在结构上具有很大的不同,完全取消了机械传动和机械转向装置,车辆行驶过程中的差速问题不能用传统的机械差速器来完成,所以研发电子差速器成为研究的重点,而研发电子差速器的关键是建立四轮差速转向数学模型。

图1 全向电动底盘总体结构
1 全向电动底盘四轮差速转向模型的构建
1.1Akermann-Jeantand车辆转向模型
全向电动底盘设计速度为30km/h,对于低速行驶的车辆,四轮差速转向模型的基础是由Ackermann和Jeantand提出的两轮差速转向分析模型。该分析模型的假设条件为:(1)车体是刚性的;(2)车轮为纯滚动运动,不考虑轮胎的滑移和滑转运行状态;(3)轮胎的侧向变形和侧向力成正比,不考虑轮胎材质与结构上的非线性和由于离心力使轮胎垂直载荷发生变化对轮胎产生的影响[1]。
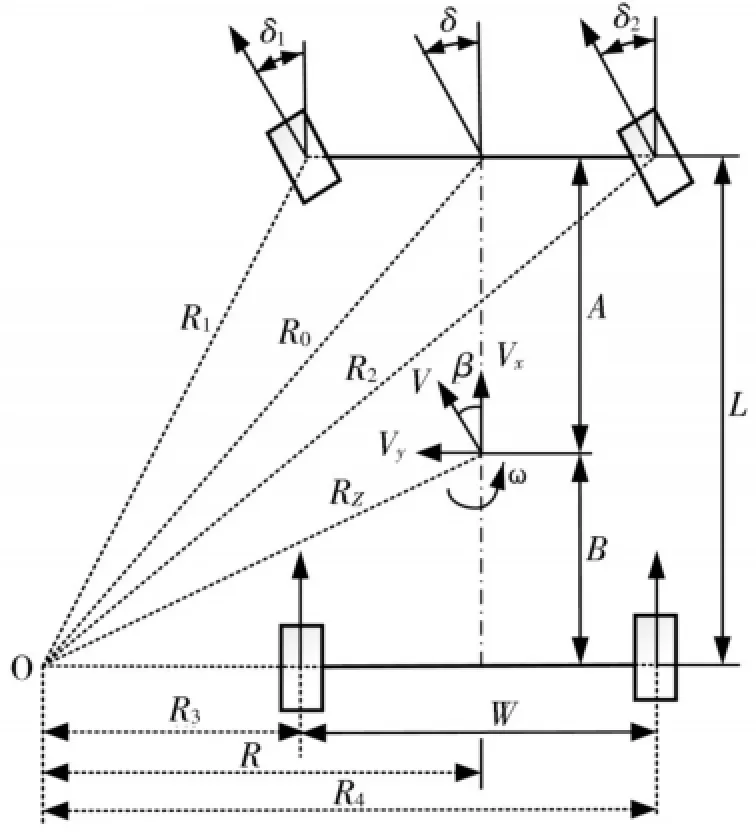
图2 Akermann-Jeantand车辆转向模型
图2为Akermann-Jeantand车辆转向模型[2]。为保证车辆转弯时各车轮只滚动无滑动,要求四个车轮均绕同一个圆心O转动,即每个车轮的轴线交于同一点。图中点O即为转动中心,车辆绕此点做圆周运动,L为前后轴的轴距,W为内外侧车轮的轮距,A和B分别为前轴和后轴到车辆质心的距离,R1~R4分别为各个车轮绕转中心O的转向半径,R0为前轴中点绕旋转中心O的转向半径,RZ为车辆质心绕旋转中心O的转向半径,R是O点到后轴中点的距离。V为瞬心处的运动速度,V1~V4分别为各个车轮的纵向运动速度,δ1、δ2分别为内外转向轮的转角,δ为前轴中点处的阿克曼转角。β为车辆质心处的侧偏角,ω为车辆的横摆角速度。
由图2中的几何结构可以得到以下关系式:
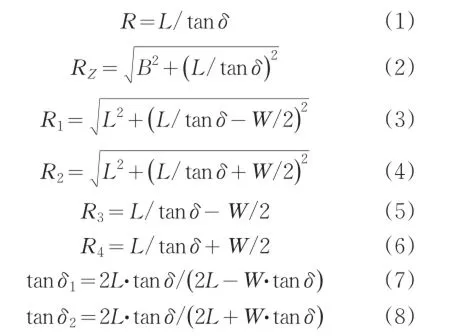
由式(7)和式(8)可得:

由瞬心定理可得:
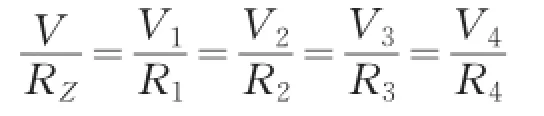
由上式可得:

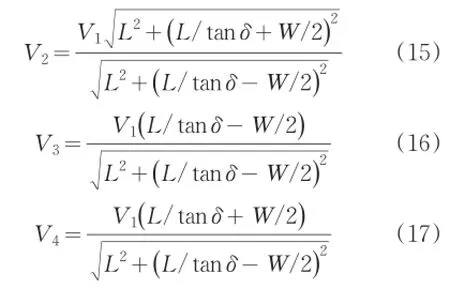
把式(2)~(6)代入上式,可得各个车轮的纵向速度为:

在全向电动底盘实际转向行驶过程中,无法测量阿克曼转角δ,但可以测量出电动底盘左转向轮的转角和车速。当电动底盘左转向轮的转角δ1和车速V1已知时,可由式(7)推导出转角δ的计算式为:

由式(9)可得:

把式(13)和式(14)代入式(10)~式(12),即可求出各个车轮的纵向平移速度。
V1为左前轮的设定速度
把式(13)代入式(8)可得转向时两前轮的转角关系:
δ1为左前轮的设定转角

1.2全向电动底盘四轮差速转向数学模型
对于低速转向车辆来说,四轮差速逆相转向可减小转弯半径,提高车辆转弯的灵活性。
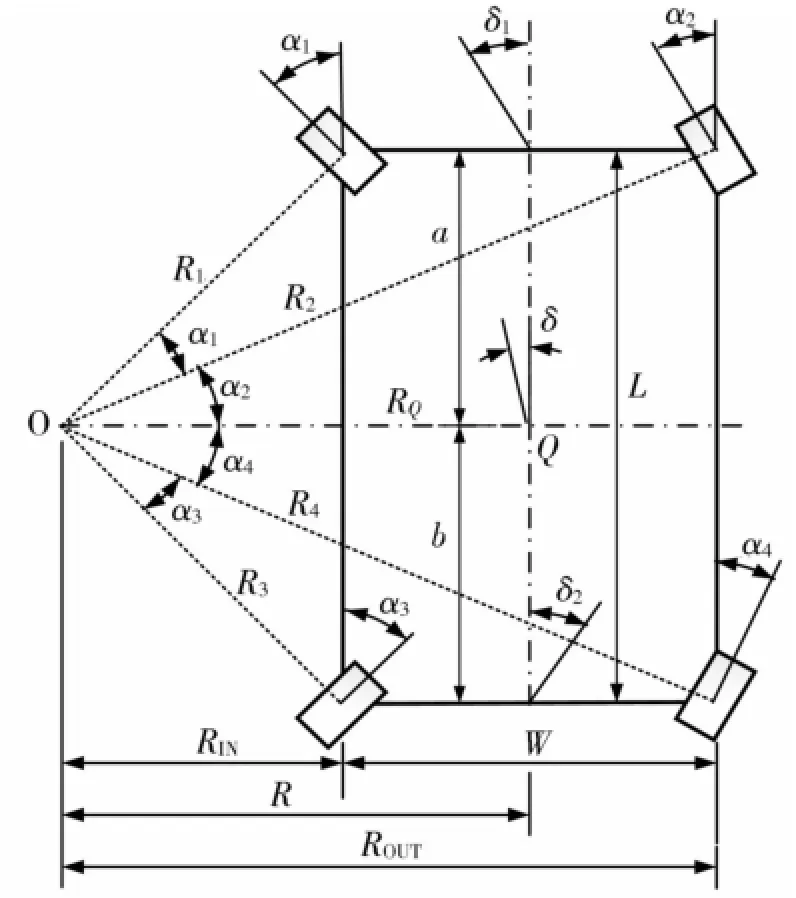
图3 前后轮反向转动差速转向模型
图3为前后轮反向转动差速转向模型。图中L为前后轴的轴距,W为内外侧车轮的轮距,a和b分别为前轴和后轴到车辆质心的距离,R1~R4分别为各个车轮绕旋转中心O的转向半径,RQ为质心Q绕旋转中心O的转向半径,RIN为旋转中心O到两内侧车轮中心连线的距离,R为旋转中心O到车辆左右对称线的垂直的距离,ROUT为旋转中心O到两外侧车轮中心连线的距离,α1~α4分别四个转向轮的转角,δ1和δ2分别为前轴和后轴中点处的转角,δ为车辆质心处的转角[3,4]。
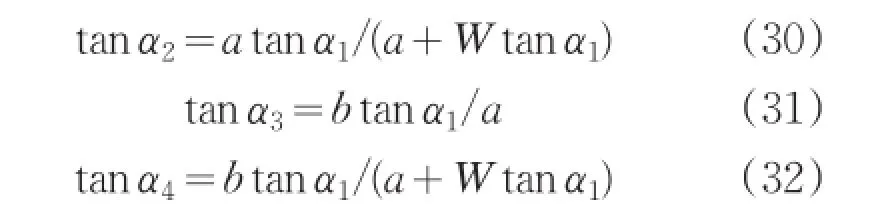
由图3中的几何关系可知:

由式(25)可得:

当左前轮的转角α1已知时,把式(24)代入式(26)~(28)可求出其他车轮的转角。
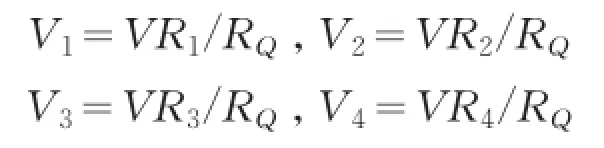
由瞬心定理可得:

式中,V为全向电动底盘质心的速度,V1~V4分别为各个车轮的纵向运动速度。
由上式可得:
把式(20)~式(24)代入上式,可得各个车轮的纵向速度为:
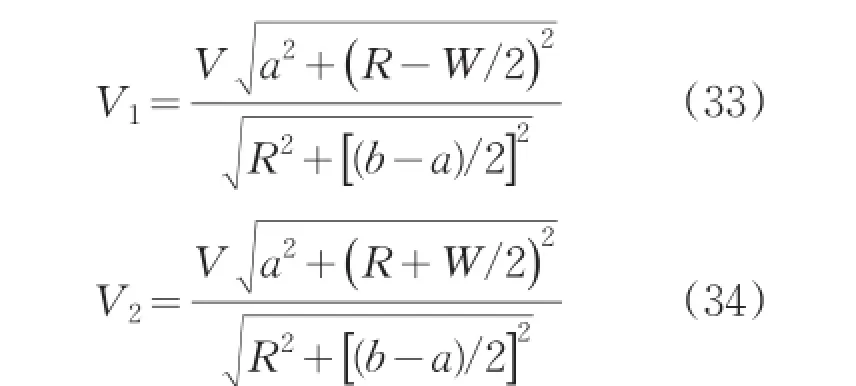
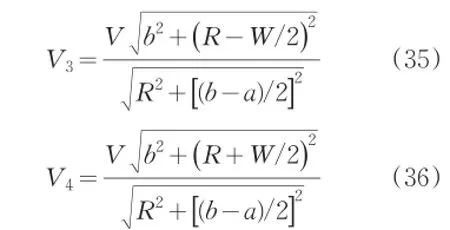
当电动底盘左转向轮的转角δ1和车速V1已知时,由式(33)可得:
把式(29)和式(37)代入式(34)~式(36),即可求出各个车轮的纵向平移速度:
V1为设定速度
为进一步简化模型,假设:
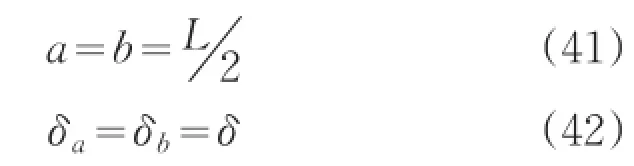
式中,δ为全向电动底盘前后轮轴中点处的转向角。此时质心Q位于小车的对称中心,全向电动底盘在转向过程中的瞬态圆心点处于前后轮轴的对称中线上。把式(41)代入式(30)~(32)可得:
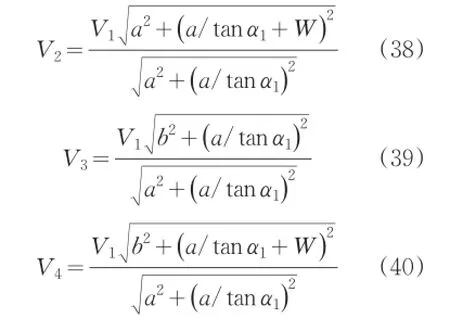
把式(41)代入式(38)~(40)可得:
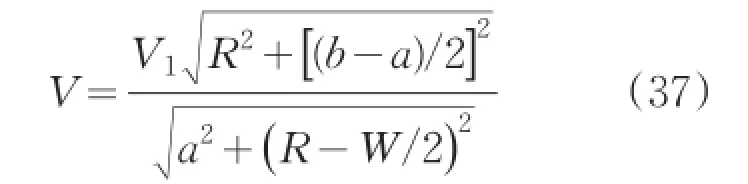
把式(41)和式(42)代入式(19)可得:

比较式(45)与式(1)可知,与典型的前轮差速驱动Akermann-Jeantand转向模型相比,前后轮反向转动差速转向模型的转向半径减小了一半。在式(38)~式(40)中,对于全向电动底盘来说,由于L、W、a、b为固定常数,因此转向过程中各个车轮的速度是左转向轮的速度(V1)和转向角度(α1)的函数。
2 四轮差速转向数学模型的应用
利用所建立的四轮差速转向数学模型可实现全向电动底盘的四轮差速转向控制。图3所示为全向电动底盘总体控制结构[5]。
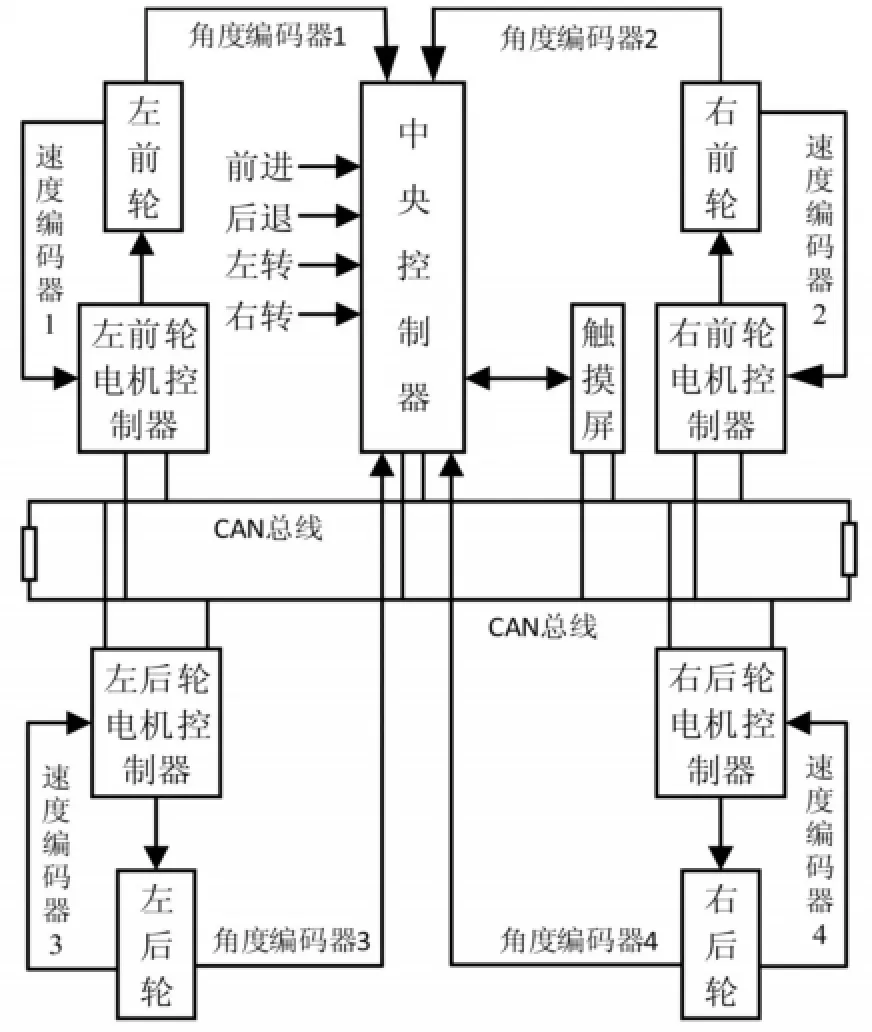
图4 全向电动底盘总体控制结构
四轮差速转向控制过程如下:车辆转弯时,中央控制器根据驾驶员给定的前轮转弯角度信号(α1)和转弯速度信号(V1),由控制程序根据四轮差速转向模型公式(30)~式(32)计算出差速转向时其他三个车轮的转向角度α2、α3、α4;根据四轮差速转向模型公(38)~式(40)计算出差速转向时其他三个车轮的转向速度V2、V3、V4。车轮速度可通过中央控制器输出的电压信号分别控制四个电机控制器来实现。转向过程中,四个车轮的转向速度保持不变。根据给定的前轮转弯角度,由四轮差速转向模型计算出各个车的目标转角后,由旋转编码器实时测量转向过程中各个车轮的实际转角,并与存储在中央控制器中的目标转角进行比较,当各个车轮的实际转角与目标转角相等时,由中央控制器控制各个车轮停止转动,实现四轮差速转向。
3 结论
基于Akermann-Jeantand两轮转向模型,建立了全向电动底盘四轮差速转向数学模型。该模型适用于四轮低速转向工况,在该工况下当前后轮转角相等时,采用四轮转向逆相控制模式可使转弯半径最小,与两前轮转向控制模式相比,转弯半径可减小一半。这对于低速选位停车、窄道行驶等都会带来极大的方便。利用该模型,可实现全向电动底盘的四轮差速转向控制。
[1] 靳彪,张欣,杨庆保.纯电动汽车低速转向差速控制模型[J].北京交通大学学报,2013,37(4):158-160.
[2] 袁仪,陈世元.电动汽车电子转弯差速的解决方案综述[J].上海汽车,2009(3):2-5.
[3] 舒进,陈思中,杨林.四轮独立转向系统控制策略与试验[J].农业机械学报,2005,36(7):25-28.
[4] 高拓宇.汽车驱动轮电子差速控制方法研究[D].重庆:重庆交通大学,2011.
[5] 颜南明,张豫南,王和源.新型电传动车辆驱动控制系统设计[J].兵工学报,2012,33(2):232-236.
Four Wheel Differential Steering Model for Omnidirectional Electric Chassis Applied in Off-road Vehicles
ZHU Zhenhua1,LV Qiongying1,WANG Yifan2,DING Hongtao3
(1.School of Mechatronical Engineering,Changchun University of Science and Technology,Changchun 130022;2.Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130022;3.the University of Iowa,Iowa City 52240)
Omnidirectional electric chassis has such functions as four wheel independent driving and steering.In the basis of Akermann-Jeantand’s two wheel steering model,four wheel differential steeringmathematical model for omnidirectional electric chassis is studied.The relationships of angle and speed among the four wheels are established which solves the key issues in the process of differential steering control for four wheels.By use of the four wheel differential steering mathematical model,the differential steering control for four wheels of omnidirectional electric chassis can be realized.It is obviously that the four wheel differential and inverse phase steering mode can make the turning radius reduce by half,which is very important to improve the flexibility and controllability of omnidirectional electric chassis.
omnidirectional electric chassis;four wheel differential steering;mathematical model
U273
A
1672-9870(2015)05-0048-05
2015-05-18
吉林省科技厅资助项目(20140204064GX)
朱振华(1970-),男,副教授,E-mail:zhuzhenhua0431@163.com
