嵌入式以太网在网络激光标刻技术中的应用研究
2015-08-23闫久江李红军
闫久江,李红军,陈 伟
YAN Jiu-jiang, LI Hong-jun, CHEN Wei
(武汉纺织大学 机械工程与自动化学院,武汉 430073)
0 引言
激光标刻技术是当今工业生产中的重要应用技术之一。随着其应用领域的不断扩大,它的系统稳定性、便利性和制造成本等关键指标也越来越受到人们的关注。当今工业现场的单机一般由PC机、控制板卡、上位机控制软件、激光发生器及激光头等部分组成,这种传统的组合机器具有成本高、效率低、便利性差等特点,无法适应实际中的批量化生产。近年,以STM32F107为基础嵌入式技术以其专用性强、系统精简等特点在工控领域得到了长足发展,该处理器为互连型,采用了ARM7架构的Cortex-M3内核。基于高速以太网PHY芯片DM9161A的以太网接口也广泛应用于嵌入式系统中,实现系统的远程通信、监控和数据处理等功能。本研究采用STM32F107微控制器实现单工位打标机的控制功能,并且结合以太网模块实现单工位的激光标刻机与上位机的通信功能,以此实现打标机的高稳定性和低成本组成,以满足复杂工业现场的高效率生产需要。
1 系统的工作原理及总体设计
振镜扫描式激光标刻系统一般由激光发生器、控制板卡、以及集成了X/Y振镜电机、聚焦透镜、振镜驱动电路的激光振镜头组成。激光标刻系统的核心是其控制系统,在本设计中,控制系统由标刻控制单元实现,它主要由激光控制模块、激光振镜运动控制模块、网络通信模块和报警模块组成。系统原理框图如图1所示。

图1 网络激光标刻控制系统原理框图
本系统中STM32F107微控制器中集成有MAC(Media Access Control的缩写,即媒体访问控制子层协议),再通过IEEE 802.3协议定义的简化独立介质接口RMII与外部的PHY芯片及RJ-45座相连接,搭建成适用于各类应用的以太网网络互通平台,以此使上位机服务器与嵌入式客户机形成主从式网络连接,使下位机打标控制单元能通过其网络通信模块根据轻型IP协议(Light weight IP,LwIP)与上位机服务器进行数据传输。系统工作时,激光器的功率、延时时间、占空比和零点位置等参数由系统软件进行初始化设置。之后,上位机将待标刻的字符数据通过嵌入式以太网传输给具有唯一MAC地址的下位机的标刻控制单元,该单元再通过其网络模块接收到字符数据,经过处理转化为XY-100协议要求的16位数字位置控制信号后送至激光运动控制模块,由此模块对数字位置控制信号进行差分、放大、比较、闭环校正等处理后送至振镜电机,电机带动扫描镜转动,从而实现振镜扫描式激光标刻。
2 系统硬件设计
2.1 网络通信模块硬件设计
基于STM32F107微控制器的在硬件上的资源的丰富性和它集成有以太网MAC等重要模块,以及在软件上有着健全的标准库函数,故本设计选取该芯片为CPU;另外,由于STM32F107没有附带物理层设备,故选取DM9161A为外部PHY Ethernet网口芯片。利用STM32F107内部提供的以太网数据链路层MAC控制器与外部的物理层接口芯片及外围辅助电路即共同组成该系统的高速以太网接口。本系统即通过该接口与上位机通讯,并由CPU提供的接收/发送寄存器及2K FIFO缓存(First In First Out)实现标刻数据和控制信号的实时接收与发送的功能。该模块硬件电路图如图2所示。
在本设计中,以太网MAC与PHY的连接采用精简的介质无关接口(RMII)模式,该接口需要7跟数据线实现,但是可以和MII一样支持10兆和100兆的总线接口速度。其各管脚在本模块中的配置分析如下。首先,时钟信号CLK-REF由外部有源晶振U2即XOSM-57提供,发送端口TX-EN、TX[0:1]分别外接CPU端ETHRMII-TX-EN、ETH-RMII-TXD[0:1]端口,用以完成从MAC端向物理层PHY发送数据;接收端口RXD[0:1]、RX-DV分别外接ETH-RMII-RXD[0:1]及ETH-RMII-CRSDV,用以完成MAC端从物理层PHY接收数据,在该配置下,系统可以全双工工作。另外,在该模块中,HR911105A为分离RJ45的1:1变压器芯片,它能为PHY提供电气绝缘保护,使局域网处于绝缘环境中。
2.2 激光及振镜模块硬件设计
该模块为本系统激光产生和控制以及振镜控制的执行模块,主要由激光发生器驱动电路及激光振镜驱动电路组成,其硬件电路图如图3所示。
在本模块中,激光发生器由STM32F107直接控制,从CPU引出的及PA5-PA8控制信号经过74LS245N总线驱动后通过DB25端口接入激光发生器。主要控制功能及配置分析如下:
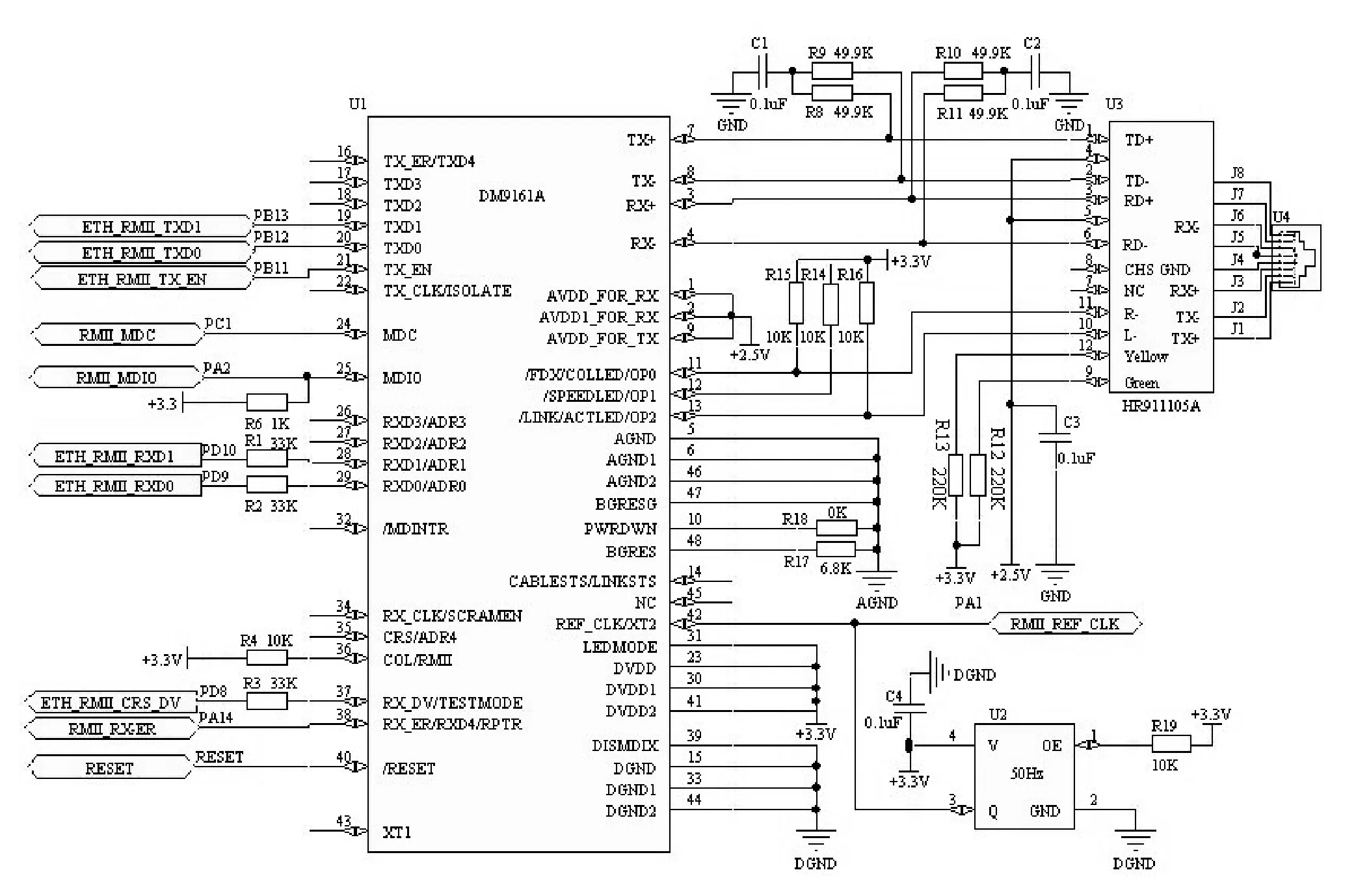
图2 网络通信模块硬件电路图
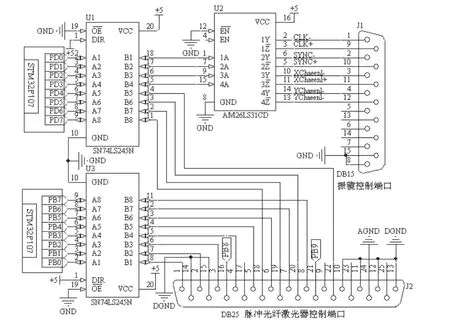
图3 激光及振镜模块硬件电路图
激光功率控制:PB0-PB7,激光功率从00H~FFH的256级控制,对应0~100%的功率输出。
MO开关:PD7,主振荡器开关控制,PD7为高电平,MO开;PD7为低电平,MO关。
激光器开关:PD6,PD6为高电平,激光器开;PD6为低电平,激光器关。
频率调制:PD5,频率调制信号为5V,50KHz~100KHz脉冲信号。
报警信号:通过PB8、PB9的高低电平反应激光器温度报警、激光器高反射报警、主振荡器报警及正常运行4中运行状态。
振镜头的控制主要由激光振镜运动控制模块实现,系统根据TD-XY2-100协议,产生4路16位数字控制信号,信号经过总线驱动后再经AM26LS31CD差分驱动芯片后产生8路差分信号,最后经过DB15端口送至振对外部输入的8路信号进行进一步处理,最后达到对振镜控制端输入接口。振镜头内集成有振镜电机驱动板,镜电机在-10°~10°摆动2^16级闭环控制。
3 系统软件设计
开放系统互联参考模型(OSI)是以太网通讯的基础,在本设计中也遵循着这一标准,其中LwIP协议构成了网络层和传输层,而LwIP与uC/OS—II的接口构成操作系统模拟层。
软件部分主要完成LwIP协议在uC/OS—II中移植,以及对LwIP的初始化配置,底层设备包括激光及振镜模块各端口的初始化,建立接收及通讯数据和状态的处理线程等工作。系统工作流程图如图4所示。
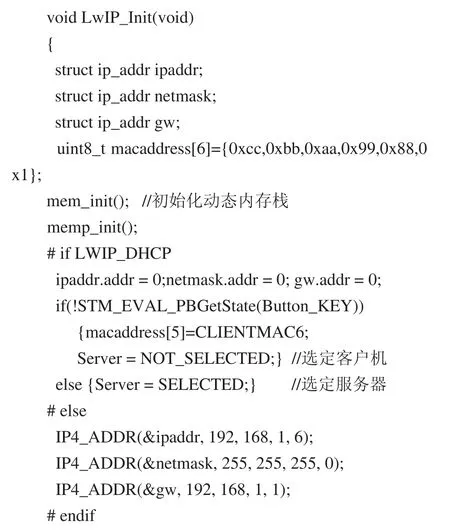
3.1 LwIP的初始化
LwIP协议栈的初始化可以通过调用LwIP_Init()函数实现,初始化函数如下所示。
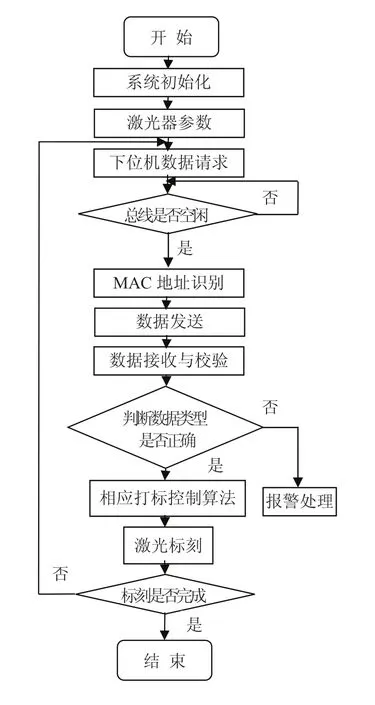
图4 系统工作流程图
3.2 底层设备端口的初始化
激光发生器功率控制端口的初始化主要是对管脚的APB2总线时钟、内存地址、端口输出模式、时钟频率等参数的配置,其初始化函数如下所示,而振镜控制端口的初始化配置与之类似,在此不在赘述。

3.3 标刻数据的传输
建立数据的接收线程,一方面要完成数据的从MAC帧中的提取,之后送至LwIP数据处理线程进行处理,以满足标刻需要;另外,把上层准备好的数据包交给底层硬件,通过硬件模块把数据封装成MAC帧发送到数据链路层及物理层网络上。数据接收函数如下。
4 结束语
该系统经过实验验证,可以顺利的接收标刻数据,并能实现对数据的简单处理,最终进行激光标刻。该解决方案组成简单,相比现行激光标刻设备控制系统组成优势明显,有较好的稳定性,对激光标刻为来发展一体化、网络化的方向有着重要的意义。
[1]肖毅,朱绍文.一种计算机控制的激光打标系统的设计与实现[J].计算机自动测量与控制2001(9):21-23.
[2]党武松,范寒柏,胡杨.STM32F107和DM9161A的高速以太网接口设计[J].单片机与嵌入式系统应用,2013(10):26-28.
[3]王世勇,李迪.NURBS图形激光雕刻算法及其嵌入式实现[J].广州:华南理工大学学报(自然科学版),2010,38(6).I12-117.
[4]Adam Dunkels.Design and Implementation of the lwIP TCP/IP Stack [M].Swedish:Swedish Institute of Computer Science,Inc 2001.
