四足机器人从高处掉落时所受冲击的仿真研究
2015-08-23吴朝阳王君泽
杨 杰,吴朝阳,王君泽
YANG Jie1,2, WU Zhao-yang2, WANG Jun-ze1
(1.南通大学 机械工程学院,南通 226019;2.南京理工大学 机械工程学院,南京 210009)
0 引言
目前,四足机器人由于具有很强的环境适应性和运动灵活性,已成为机器人研究领域的重要课题[1],在军事行动、野外工作和科教娱乐等场合应用广泛。自从二十世纪六十年代以来,四足机器人技术得到了迅速发展,如图1所示,为美国的波士顿动力公司在2006年研制出的第一代机械狗“BigDog”,它拥有十六个主动自由度和四个被动自由度[2]。如图2所示,随后波士顿动力公司又在2008年推出了第二代“BigDog”,具有优良的野外适应性。如图3所示,日本电子通讯大学也研制了Tekken系列仿小狗四足机器人[3]。在国内,也有很多的企业院校投入资金研发高性能的四足机器人,如图4所示,中国科学院下属的合肥智能机械研究所于2007年研制了四足机器人T1M1[4]。
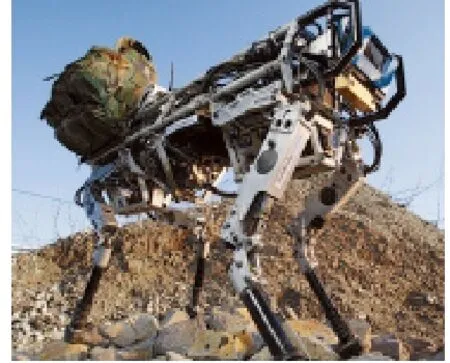
图1 第一代“BigDog

图2 第二代“BigDog”
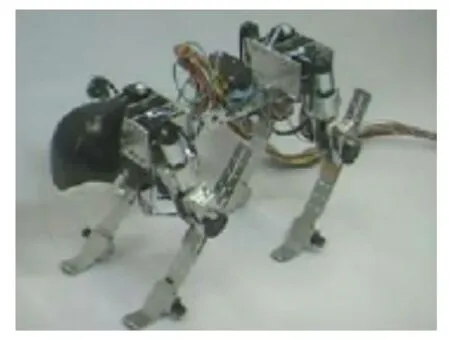
图3 Tekken
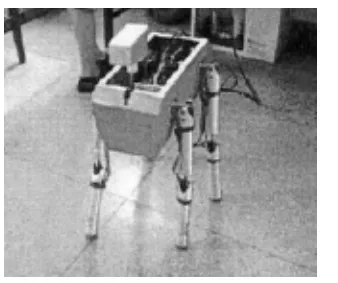
图4 T1M1
目前在四足机器人的设计开发中,设计者多从平地运动或越野运动的角度出发来设计四足机器人,这就限制了四足机器人的发展。在野外,地形非常复杂,往往会有一些坑洞和断层,四足机器人在这种路况下行走很可能会从高处摔落。但是,很多四足机器人在设计时并没有考虑从高处摔落的情况,所以一旦这些四足机器人从高处摔落,很可能会对机器人造成损坏,影响机器人的正常工作。同时,巨大的冲击也会造成四足机器人腿部关节间隙增大,降低了机器人的控制精度和运动精度。
现实生活中,狗从1.2米以下的高度跳落时并不会受伤,主要是因为狗腿部的肌肉系统起到了很好的缓冲作用。因此,本文考虑模拟狗腿部的肌肉在四足机器人的腿上添加缓冲器(弹簧),以减小四足机器人从高处摔落时受到的冲击,保护机器人不受损坏。
本文借助于虚拟样机技术,采用ADAMS软件建立四足机器人的模型,在四足机器人的腿上添加缓冲器,模拟四足机器人从1.2米的高度掉落时的各关节和缓冲器的受力情况。通过分析仿真结果提前发现一些问题,来改进四足机器人的物理样机设计[5]。
1 四足机器人的简化机构模型建立
如图5所示,仿照狗的身体构造采用ADAMS软件建立四足机器人的简化模型。设计的四足机器人躯体长1100mm,宽380mm,前腿大腿长500mm,前腿小腿长460mm,后腿大腿长520mm,后腿小腿长480mm。
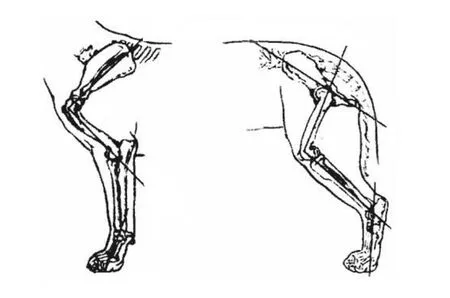
图5 狗的身体构造
首先建立四足机器人的脊柱,再在脊柱的基础上创建四肢和关节,每个关节设计一个旋转自由度,脊柱和四肢的材料设置为45#。如图6所示,为了使四足机器人从高处掉落时有优良的缓冲性能,参照狗的腿部肌肉位置在四足机器人的腿部添加弹簧(缓冲器)。初步将弹簧的K值设置为190,C值设置为0.1。建立大地的模型,使之位于四足机器人模型的下面,并距离四足机器人脚部1.2米。创建四足机器人脚部和大地表面的约束,使四足机器人掉落下来后只能在大地上方运动。

图6 ADAMS模型弹簧布置情况
实际中的四足机器人从高处摔落时,受到损坏或影响的部位主要是关节部分,因此本次模拟重点分析关节处受到的冲击情况。在ADAMS模型中,很难直观地求出四足机器人关节处所受到的冲击情况。因此,本文为了更好地显示出各关节在机器人摔落时受到的冲击情况,将四足机器人的关节和脊柱设置为弹性体,通过测量腿部各主要关节的应变能反映四足机器人所受到的冲击情况。建立好的四足机器人模型如图7所示。
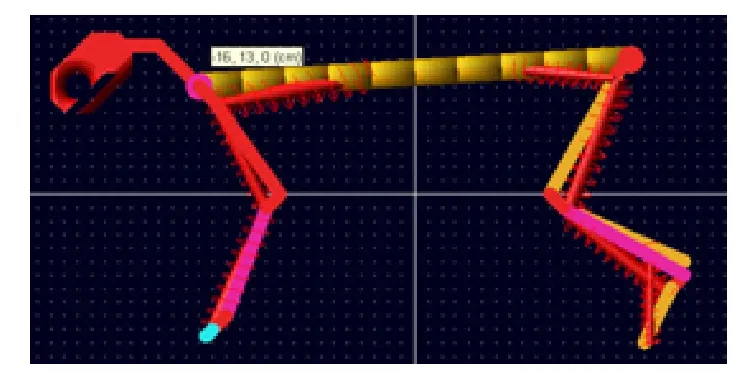
图7 四足机器人模型
2 模型的测量与分析
在进行优化设计之前,本文对建立的模型进行了一次仿真,获得了四足机器人腿部主要关节的应变能测量曲线。针对四足机器人从高处跳下情况的研究,本文选取了四足机器人各关节所受到的冲击为测量对象,并通过对这些因素的测量来分析本文建立的模型。
如图8所示,当四足机器人从1.2米的高处跳下后,四足机器人的肘关节会受到较大的冲击,并且是在前腿刚落地后的0.3s时应变能出现最大值,说明四足机器人掉落时肘关节承受了很大一部分冲击。
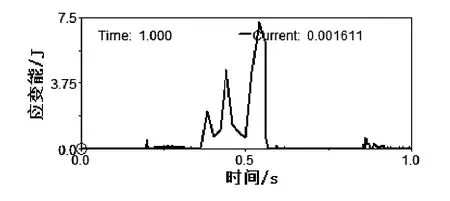
图8 肘关节应变能变化情况
如图9所示,四足机器人的肩关节会在落地后受到微小的冲击,且在不同的时间多次出现高峰值。说明经过腕关节、肘关节以及弹簧(缓冲器)等一系列环节的缓冲,四足机器人的肩关节受到的伤害已经较小了。
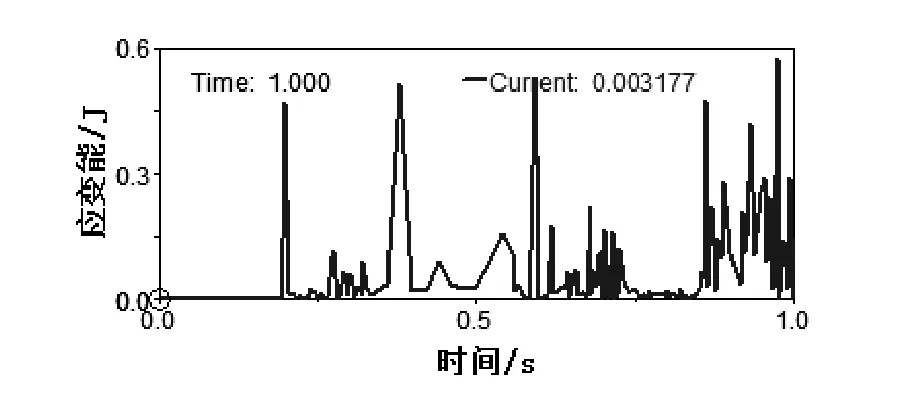
图9 肩关节应变能变化情况
如图10所示,四足机器人的膝关节会在落地时受到很大冲击(大于肘关节),并且是在四足机器人刚落地的瞬间受到最大冲击。现实生活中,狗由于后腿比前腿长,从高处落下时,后腿先落地,且后腿肌肉力量最为强大,因此膝关节承受的力也最大。本次的模拟这与实际情况较为接近。

图10 膝关节应变能变化情况
如图11所示,四足机器人的髋关节在落地时受到的冲击不大。这主要由于经过踝关节、膝关节以及弹簧(缓冲器)的缓冲,髋关节受到的冲击已经被逐级减小了。
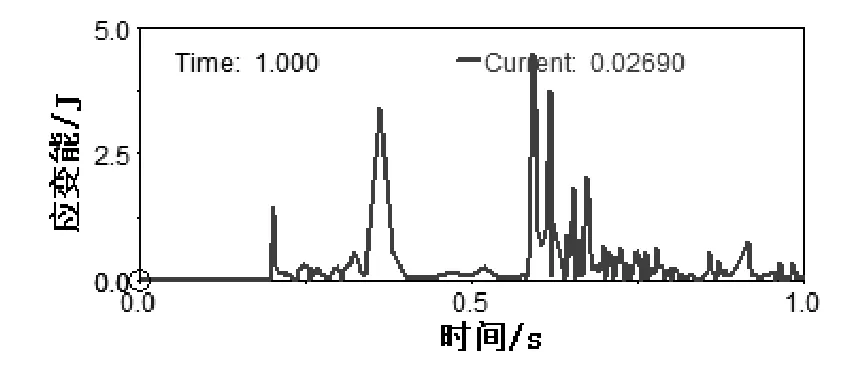
图11 髋关节应变能变化情况
经过对4个关节的应变能图的综合分析发现,各个关节的最大受力都出现在四足机器人刚落地时,并且由于后腿先落地,所以后腿最大受力出现的时间要略早于前腿。这是与现实中四足机器人落地的实际情况相符合的。
3 缓冲器缓冲性能对所受冲击的影响分析
模型中用弹簧模拟现实中的缓冲器,弹簧的刚度系数对缓冲器的性能影响很大,因此,本文将弹簧的刚度系数作为变量,用于模拟缓冲器缓冲性能对所受冲击的影响。
从测量中发现,在四足机器人的前腿中,肘关节的应变能大于肩关节的应变能,在四足机器人的后腿中,膝关节的应变能大于髋关节的应变能,为了能较好地反映四足机器人四肢所受到的冲击情况,本文选择四足机器人的肘关节和膝关节为测量对象。
在四足机器人模型中,前腿的肘关节和后腿的膝关节位置对应,前腿的肩关节和后腿的髋关节位置对应。从测量中发现,四足机器人从高处摔落时,后腿的膝关节的应变能大于前腿肘关节,后腿的髋关节的应变能大于前腿的肩关节,说明后腿各关节受到的冲击要明显大于前腿。在四足机器人从高处掉落时,后腿的缓冲作用尤其重要,因此本文分别选择了后腿小腿的弹簧和后腿大腿的弹簧作为变量,以此研究缓冲器缓冲性能对四足机器人所受冲击的影响。
3.1 针对四足机器人的后腿小腿的弹簧进行仿真分析
将四足机器人的前腿小腿上的弹簧的K值设置为变量DV-1,参数配置分别为180、200和220,进行三次迭代运算,得到如图12所示的肘关节受力曲线和图13所示的膝关节受力曲线。
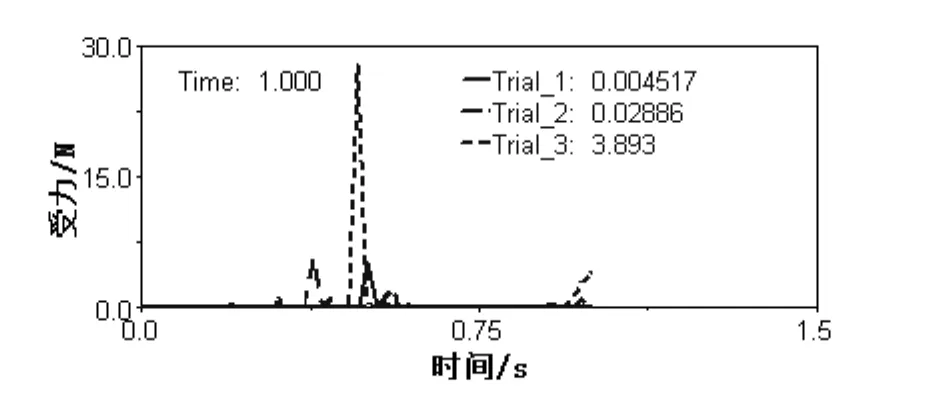
图12 肘关节受力曲线
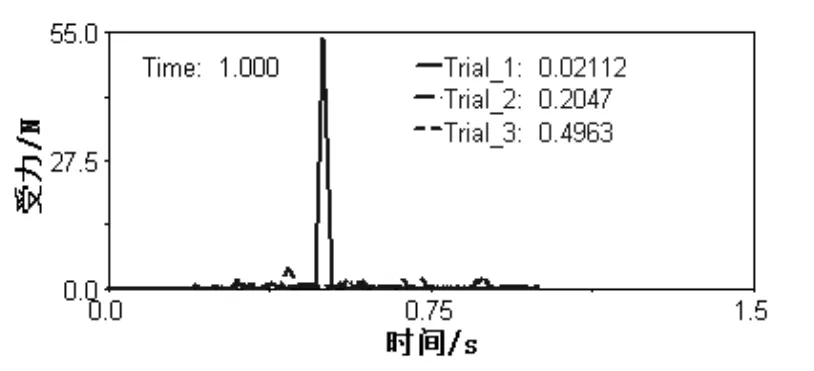
图13 膝关节受力曲线
对不同K值的弹簧进行敏感度测量,得到如表1所示的后腿小腿弹簧敏感度。

表1 后腿小腿弹簧敏感度
3.2 针对四足机器人的后腿大腿弹簧K值进行仿真分析
将四足机器人的前腿小腿上的弹簧的K值设置为变量DV-2,参数配置分别为180、200和220,进行三次迭代运算,得到如图14所示的肘关节受力曲线和如图15所示的膝关节受力曲线。
图14 肘关节受力曲线

图15 膝关节受力曲线
对不同K值的弹簧进行敏感度测量,得到如表2所示的后腿大腿弹簧敏感度。
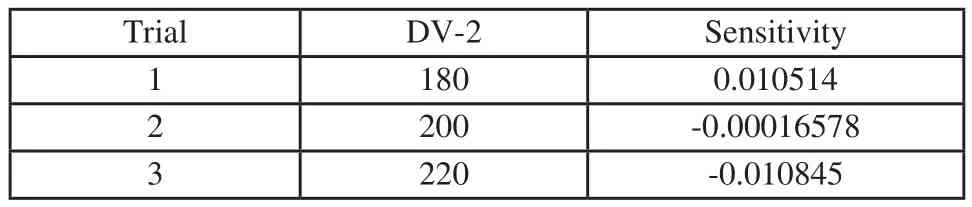
表2 后腿大腿弹簧敏感度
4 优化设计
根据仿真分析中得到的数据,发现四足机器人的后腿小腿弹簧为敏感因素,下面针对选取的敏感因素进行优化分析。
由于膝关节的受力情况最能反映四足机器人后腿小腿弹簧的性能,因此本文选取四足机器人膝关节的应变能为测量对象,选取四足机器人的后腿小腿弹簧为优化对象,对四足机器人从高处掉落时受到的冲击进行分析,得到如图15所示的膝关节应变能变化情况。
从图16中发现,当后腿弹簧的K值在200左右时,四足机器人的后腿大腿与小腿连接关节处的应变能最小,从而表明当模型从高处跌落时,K值在200左右的弹簧会保证四足机器人的后腿大腿与小腿连接关节处受力最小。

图16 膝关节应变能
如图17所示,通过对四足机器人的后腿小腿弹簧的力的测量发现,若要四足机器人从高处跳下时不受伤。在四足机器人落地的时候,缓冲器的缓冲阻力要达到42N,才能保证四足机器人的安全。
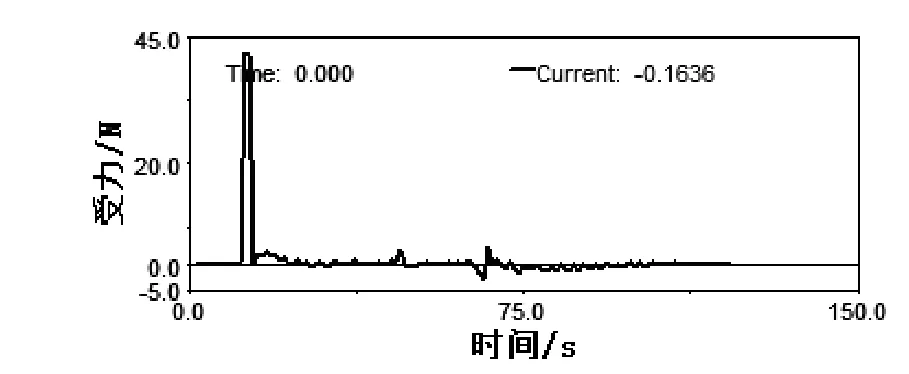
图17 后腿小腿弹簧受力
不同的缓冲器的缓冲性能是不同的,这也导致了不同的四足机器人从高处跳下时腿关节所受到的冲击不同。通过对代表后腿缓冲器的弹簧K值的优化分析,本文得出了从固定高度跳下时,四足机器人的缓冲器要具有怎样的性能才可以保证四足机器人的安全。
本文的四足机器人模型是参照狗的身体构造建立的。在实际情况中,狗的四肢发达,前腿短,后腿长,利于跳跃。其运动神经发达,身体柔软,肌肉韧带强,能够确保从高处跳下时保证其自身的安全性。本文模型很好地模拟了实际情况,并且得出的结果也与实际情况非常符合。
5 结束语
1)本文首先参照狗的身体构造建立了四足机器人的模型,并在四足机器人的腿部模拟狗的肌肉位置布置弹簧(缓冲器),且将四足机器人的各个关节设置为弹性体,通过测量弹性体的应变能反映四足机器人从高处掉落时所受到的冲击情况。
2)对建立的模型进行仿真,获得了四足机器人腿部主要关节的应变能测量曲线,并对各关节应变能的变化情况进行了分析。通过对各个关节的测量发现,四足机器人从高处跳下时,膝关节处受到的冲击最大。
3)选择四足机器人的肘关节和膝关节为测量对象,选择后腿小腿的弹簧和后腿大腿的弹簧作为变量,研究了缓冲器缓冲性能对四足机器人所受冲击的影响,并得到了后腿小腿弹簧和大腿弹簧的敏感度。
4)经过分析发现,四足机器人的后腿小腿弹簧为敏感因素,选取四足机器人膝关节的应变能为测量对象,选取四足机器人的后腿小腿弹簧为优化对象,对四足机器人的从高处掉落时受到的冲击进行分析和优化,得到了对本文的四足机器人具有最佳缓冲性能的弹簧的刚度系数,为四足机器人物理样机的建立奠定了基础。
[1]张小峰,俞志伟,张昊,等.基于MATLAB仿壁虎机器人仿生步态规划与仿真[J].高技术通讯,2011,21(2):185-190.
[2]章忠良.四足机器人运动学及动力学研究[D].成都:电子科技大学,2012.
[3]D.Wooden, M.Malchano,M.H.Raibert et al.Autonomous Navigation for BigDog[A].IEEE International Conference on Robotics and Automation[C],2010,10(4):4736-4741.
[4]Lei Sun, Yajing Zhou,Wanming Chen, et al.Modeling and robust control of quadruped robot[A].Proceeding of the 2007 International Conference on Information Acquisition[C],2007,pp:356-360.
[5]马宗利,王建明,李华,等.基于ADAMS的四足机器人上下坡运动仿真[J].机床与液压,2013,2(4):122-126.
