雷达数据处理中的虚假航迹综合抑制技术
2015-08-10戴霄
戴 霄
(中国船舶重工集团公司第723研究所,扬州225001)
0 引 言
虚假航迹是由非真实目标的雷达量测数据(杂波、干扰等)建立的虚假的、错误的目标航迹。在作战指挥时,如果态势中存在大量的虚假航迹,必然会给指挥员的作战决策带来严重的干扰。因此对于任何一个探测系统来说,所产生的虚假航迹越少越好。但目前,由于探测环境日益复杂,且存在很多有源、无源干扰,雷达为了能够尽早发现散射面积日益减小的作战平台,导致探测数据中不可避免会混杂部分杂波或干扰数据。当杂波密度过大时,仅单纯使用现有的航迹起始算法[1-5]常常会建立较多的虚假航迹。
航迹起始算法中判断哪些不同周期的点迹是来自同一目标的问题是个纯粹的概率问题,因此从理论上来说无论采取何种起始算法,在一些杂波较为集中的区域仍会在一定概率上建立一些虚假航迹,如图1所示。而我们的研究工作是尽可能降低该概率值,尽量减少虚假航迹的数量;另外,即使建立了虚假航迹,也必须尽可能缩短其生命周期,减少其在态势中存在的时间。
1 虚假航迹评估方法
在文献[6]中,作者认为信息融合能力主要体现为3个字:快、准、稳。其中“准”是指融合态势与真实态势相一致,该一致性决定了作战指挥员可在多大程度上相信融合态势,这种概念同样可适用于雷达数据处理系统。而在与“准”相关的所有指标中,正确航迹率是反映正确航迹多少(同样也反映了虚假航迹多少)的一个重要指标。
1.1 正确航迹率
正确航迹率是指雷达态势中正确航迹占航迹总数的比例。设在t时刻,雷达态势中正确航迹数为Qdc(t),航迹总数为Qd(t),雷达态势在t时刻的正确航迹率ρdc(t)为:
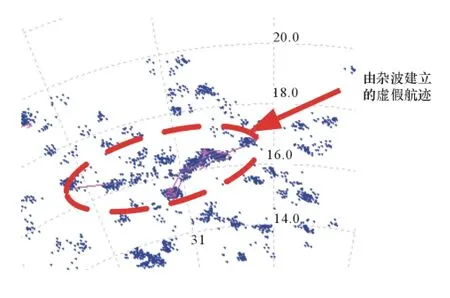
图1 某型雷达实测数据航迹处理后的虚假航迹

在 [tb,te]时间段内,正确航迹率ρ为:

正确航迹率能够从侧面如实反映一段时间对虚假航迹的抑制水平。但在通常的实际应用中,雷达探测区域内真实的目标个数是非常有限的,而杂波和干扰却相对较多,建立的所有航迹中绝大多数都是虚假航迹(即Qdc(t)≪Qd(t)),因此即使通过各种技术手段有效抑制了虚假航迹的产生,但可能体现在正确航迹率数值上的变化却并不直观。为了方便工程应用,本文提出了单位时间虚假航迹数、虚假航迹平均维持周期2个指标,能够更直观地综合评估一段时间内对虚假航迹抑制的能力。
1.2 单位时间虚假航迹数
设在 [tb,te]时间段内,共建立航迹m条,分别为Tr1,Tr2,Tr3,...,Trm,假设前n(n≤m)条为虚假航迹,则单位时间的虚假航迹数为:

2 虚假航迹综合抑制方法
1.3 虚假航迹平均维持周期
设上述的n条虚假航迹的维持时间(航迹从建立到撤销的时间差)分别为t1,t2,t3...tn,则虚假航迹平均维持周期为:
在航迹处理中,要达到在保证真实目标顺利起始的同时有效抑制虚假航迹产生的目的,仅依靠某单一方法是非常困难的,需要多种方法综合处理。通过对大量的实测数据进行分析发现,绝大多数的虚假航迹具有以下2个特点:
(1)航迹拟合误差较高;
(2)航迹维持时间较短。
因此本文针对上述的虚假航迹特点,从航迹起始门限选择、雷达原始量测数据分析、航迹全生命周期的质量管理等多个环节出发,共同解决虚假航迹抑制问题。
2.1 基于残差门限的虚假航迹判别方法
无论采用何种航迹起始算法(如Hough变换法、逻辑法等),最终在航迹起始前均会挑选出来自相邻多个周期的点迹,构成一个点迹序列,称其为点迹初始相关序列[7]。若在某一时刻,航迹处理算法已建立了多个点迹初始相关序列,那后续的工作就是如何评判这些序列的质量,从中选择出可以被认为是来自一个真实目标的序列。
图2展示的是2个不同的初始序列(序列A和序列B),显而易见序列A的质量要明显高于序列B(通俗的说就是序列A比序列B更像是来自一个真实目标)。因此,基于这种朴素的思想,对初始相关序列引入了残差的概念。
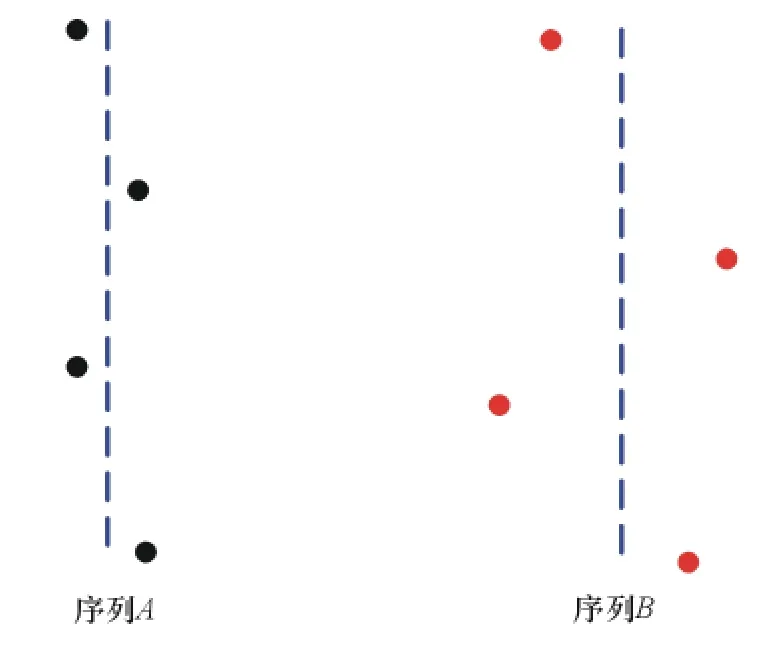
图2 不同初始相关序列的比较
2.1.1 初始相关序列残差
设一初始相关序列为 (p1,p2..,pN),令^pi为pi的滤波值,vi=^pi-pi为该相关序列中第i点的残差,而相关序列的残差用E表示,计算公式如下:

通常航迹处理算法在直角坐标系下进行,因此在实际应用时可分别计算序列在直角坐标系各分量上的残差值。
2.1.2 残差门限
雷达量测信息是极坐标系下获取的,其距离、方位探测精度分别为σr、σa(假设为两坐标雷达),因此为了计算方便,需将雷达在距离/方位上的探测精度变换至直角坐标系中,(σx,σy),则计算公式如下:

式中:R为距离量测值;A为方位量测值。
直角坐标系下,各坐标分量的残差门限分别为κσx和κσy(通常情况下κ取值为3)。
2.1.3 门限比较
当残差门限计算完成后,则可以将该序列的残差与门限进行比较,若小于门限,则起始一条航迹,若大于门限,则舍弃该序列。具体准则如下:
如Ex≤κσx且Ey≤κσy,则航迹起始;
如Ex>κσx或Ey>κσy,则序列舍弃。
采用该方法就能保证在起始初期剔除一些虽然相关成功,但质量较差的虚假航迹。
2.2 基于杂波区域自动识别的虚假航迹抑制技术
当雷达正常工作时,其实可以从雷达PPI显示界面上非常直观地分辨出哪些区域是杂波区(如图3所示,可以明显看出图中圆圈内的区域为杂波区),几乎所有的虚假航迹均来自这些杂波区域。
一个非常直观的想法,即是否可以通过某些技术使得计算机能够近似具备人的思维,自动识别出可能的杂波区域,从而设法抑制虚假航迹。
基于这个思想,提出了基于杂波区域自动识别的虚假航迹抑制技术。具体思路为:将雷达探测区域按照距离、方位进行网格划分(如图4所示,具体网格单元大小可根据雷达实际工作参数确定)。从首次接收雷达点迹数据开始,采用滑窗法(最近几个周期)实时统计、计算以下5个统计量:
(1)每个周期平均点迹总数S1;
(2)每个网格落入的点迹数S2;
(3)有点迹落入的网格数S3;
(4)根据S1和S3求取的网格平均点迹数S4;
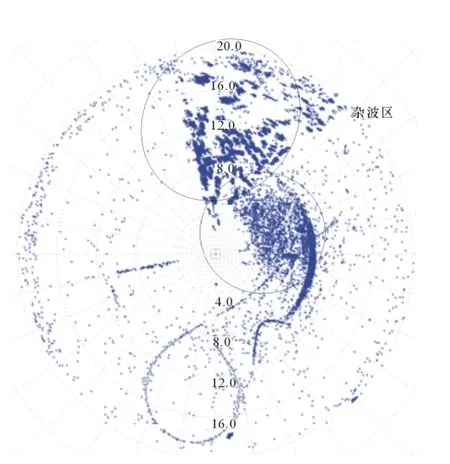
图3 雷达探测区域内的杂波区
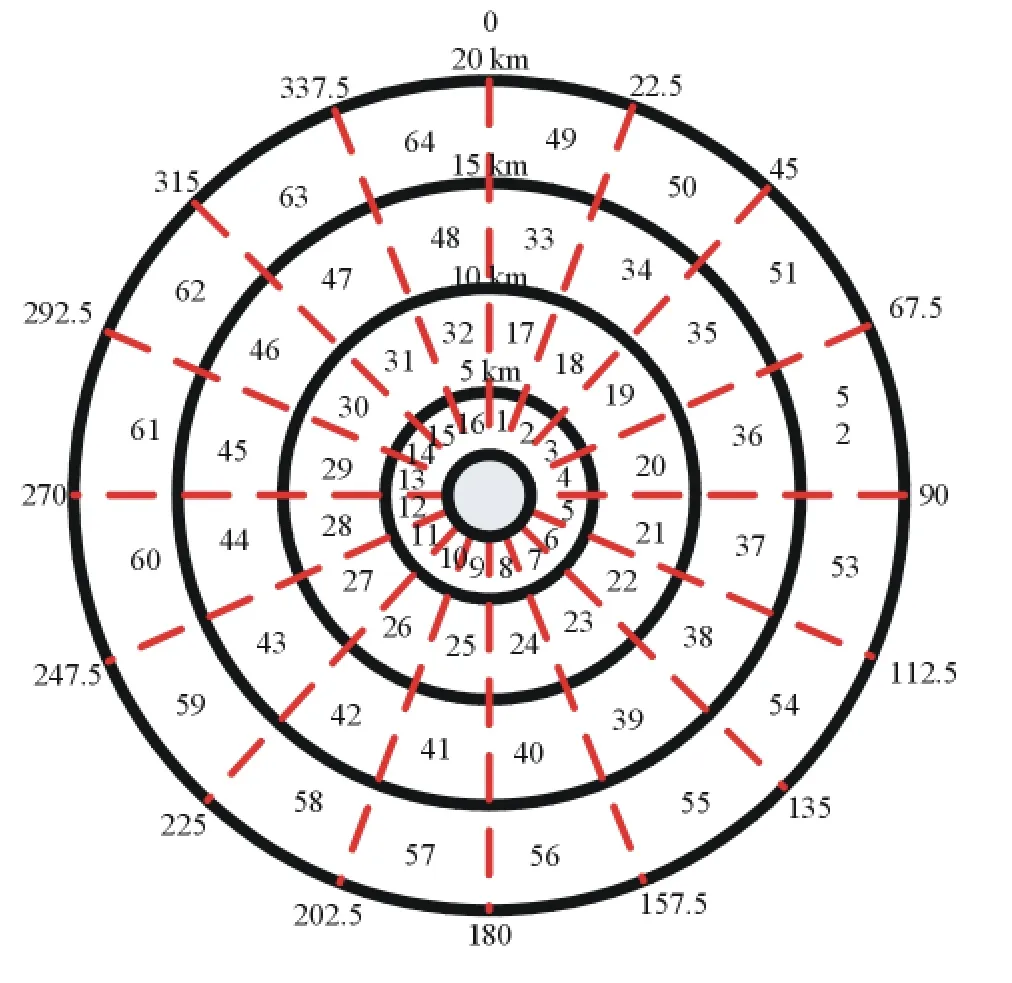
图4 当雷达量程为20km时的网格划分示意图
(5)每个网格内被舍弃的初始相关序列个数S5。
通过对上述前4个统计量的比较分析,分辨出点迹数量明显异常的区域并置上标识,再依据S5自动识别出可能的杂波区域,然后根据杂波分布的强弱将所有网格区域分为:非杂波区、弱杂波区、中杂波区、强杂波区4个等级。对非杂波区采用正常的航迹起始算法,并可适当放宽航迹残差门限及参与航迹起始的点迹个数,以缩短反应时间;对弱、中、强3种杂波区域,逐级提高航迹的残差门限,降低新建航迹的质量,并适当增加航迹的积累点数,以减少最终确认航迹中虚假航迹的数量。
2.3 基于关联概率的航迹质量优化管理方法
航迹质量管理是航迹管理的重要组成部分[8]。通过航迹质量管理,可及时、准确地对航迹进行起始或撤销。在实际工程应用中,通常采用打分法对航迹质量进行更新。其计算公式为:

式中:λ为航迹质量增加项;γ为航迹质量降低项。
其基本思想为:当本周期航迹存在相关点迹时,航迹质量加1(当相关波门存在大中小之分时,可根据相关波门的大小对增加值进一步细分);若航迹在本周期无相关点迹时,则航迹质量减1。当航迹质量小于确认航迹门限而大于0时,则为暂时航迹;当航迹质量大于确认航迹门限时,则从暂时航迹升为确认航迹;若航迹质量等于0时,则航迹撤销。
在实际使用中,打分法简单实用,能够很好地对航迹进行管理。但是现有的打分准则相对比较粗糙,并没有考虑点迹与航迹的互联概率的大小。如图5所示,显然航迹A的相关点位置要远比航迹B的相关点的位置更好,但对于质量管理来说,2个航迹的质量均会增加相同的值,这显然并不合理。
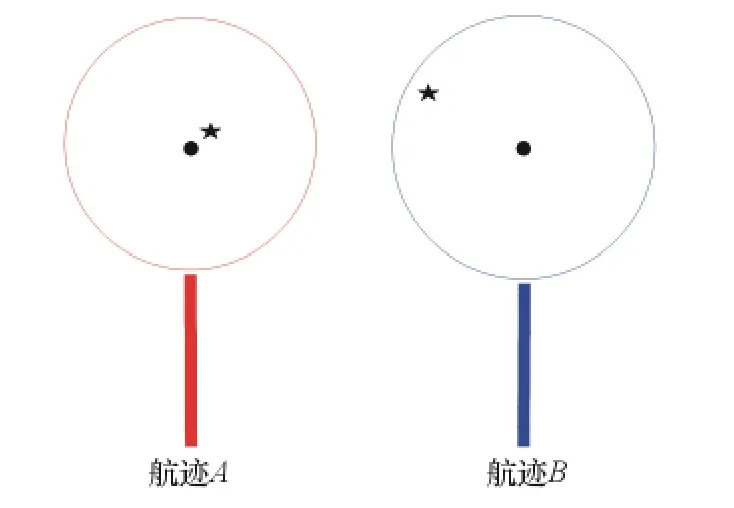
图5 航迹与点迹相关比较
假设相关点迹服从正态分布,即相关概率为:
因此,本文提出了基于关联概率p(0<p≤1)的航迹质量优化管理方法,以相关概率值代替原打分法中的航迹质量增加值;而当航迹没有相关点时,航迹质量减小常数γ(通常γ取值为0.5)。
采用本方法将使得那些相关概率一直较高(p>0.5)的航迹质量增加较快,而当航迹没有相关点时(发生丢点现象),航迹质量缓慢下降,提高其生存周期;而那些相关概率较低的航迹质量增加较慢,增加了积累点数,有效抑制了虚假航迹的产生,并且当没有相关点时,航迹质量快速下降,降低了其生存周期。
2.4 3种方法的综合应用
在工程中将上述3种方法综合应用,以达到虚假航迹抑制的目的,具体流程如图6所示。
3 实测数据验证
针对上述技术,将采用某雷达的实装数据进行验证,并采用第2节中介绍的评估方法对虚假航迹抑制水平进行评估,以证明技术的有效性。
该雷达实测数据时间长度为222.9s,在探测区域内有1架飞机,雷达原始量测数据见图3。图7~图10分别给出了采用上述虚假目标抑制技术前后的航迹处理结果。
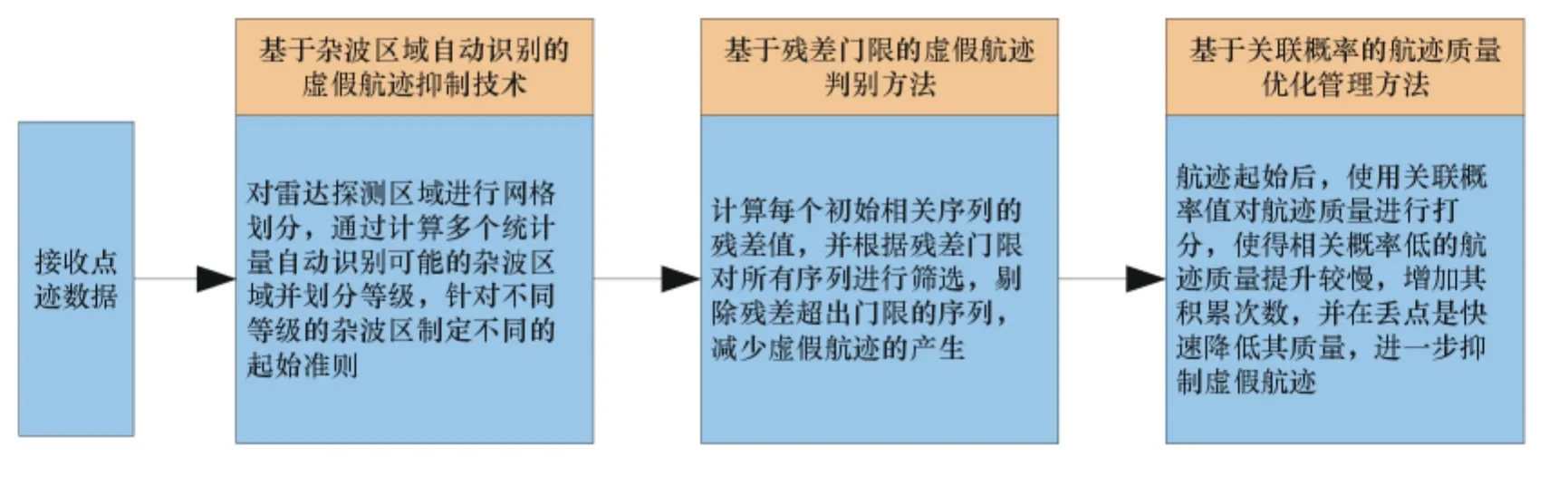
图6 多种方法综合利用流程图
没有采用虚假航迹抑制技术前共建立航迹65批,其中真实航迹2批,虚假航迹63批,所有虚假航迹的维持时间为4 213.4s。

图7 没采用虚假航迹抑制技术前的航迹处理结果图

图8 没采用虚假航迹抑制技术前的航迹列表
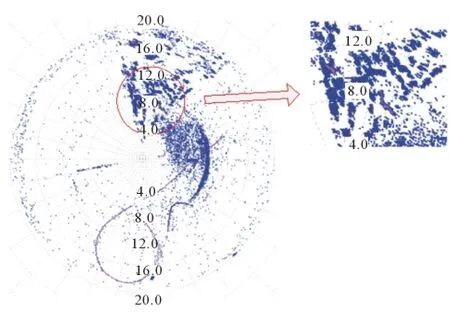
图9 采用虚假航迹抑制技术后的航迹处理结果图
采用虚假航迹抑制技术后共建立航迹12批,其中真实航迹2批,虚假航迹10批,所有虚假航迹的维持时间共为587.3s。
具体结果比较如表1所示。

表1 采用前后指标比较
4 总结与展望
虚假航迹抑制是航迹处理中永恒的难题,既要保证真实目标顺利起始,又要抑制所有可能的虚假航迹,这两者是相互矛盾的,因此留下的发挥空间非常有限。而且该问题并不是一个科学问题,更多的是个工程问题,虽然很多人都认识到问题的重要性,但真正提出有效解决办法的并不多见。因此,本文专门针对该问题阐述了一些工程上的研究成果和实践经验,首先提出了用于评估虚假航迹抑制水平的2个指标,并给出计算方法,随后介绍了3种虚假航迹抑制方法,并对这3种方法进行综合应用,有效地减少了虚假航迹的数量,降低了虚假航迹平均维持时间。最后通过实测数据验证表明,本文提出的方法是有效的。

图10 采用虚假航迹抑制技术后的航迹列表
由于在雷达数据处理阶段可以利用的信息量太少,导致很难从根本上解决虚假航迹多的问题。目前,很多雷达除了能够提供目标的位置信息外,还可以提供幅度、距离/方位扩展、信噪比、多普勒频率等特征信息[9]。信息量的增加必然会给航迹处理带来一些额外的好处(可抑制虚假航迹、提高跟踪精度、减少断航等),但这些信息的有效利用还需要对大量的实测数据(不同环境、不同目标)进行分析、归纳和总结,重新梳理航迹处理的思路和算法流程,这是目前比较重要的研究方向之一,需要持续关注。
[1]董志荣.论航迹起始方法[J].情报指挥控制与仿真技术,1999(2):1-7.
[2]Barshalom Y,Fortmann T E.Tracking and Data Assosiation[M].Boston:Academic Press,1998.
[3]孙强,惠晓滨,郭璐,黄莺.一种基于修正的Hough变换的航迹起始算法[J],航空计算技术,2011,41(2):10-12.
[4]刘昇,卢广山,张晓鸿,陈洪亮.密集杂波环境下逻辑起始算法研究[J].电光与控制,2012,19(1):34-37.
[5]周建中,王树宗,占明锋.基于一步延时的航迹起始改进算法[J].海军工程大学学报,2010,22(1):107-112.
[6]邹伟,刘兵,孙倩,等.多源信息融合能力评估关键技术综述[J].计算机与数字工程,2010(3):1-6.
[7]何佳洲,彭思鹏,敬忠良,等.数据初始互联的自适应有限记忆法[J].光电工程,2010,37(9):1-7.
[8]何友,修建娟,张晶炜,关欣,等.雷达数据处理技术[M].第1版.北京:电子工业出版社,2006.
[9]包阳.情报雷达中的虚警抑制[D].南京:南京理工大学,2010.