驼峰场联锁仿真平台研究
2015-06-28陈慧琳
陈慧琳,杨 扬
(西南交通大学 信息科学与技术学院,成都 611756)
驼峰场联锁仿真平台研究
陈慧琳,杨 扬
(西南交通大学 信息科学与技术学院,成都 611756)
本文基于VC++6.0开发了一套驼峰场联锁仿真平台。分析平台功能和数据流程,阐述平台的实现方法,简述溜放进路的联锁实现及溜放车组追踪方法,提供一种控制进路联锁的阶段化设计思路。通过调试,软件可满足铁路信号专业的教学和培训需要。
驼峰场;联锁仿真;溜放;VC++6.0
在铁路网中,凡用于办理大量货物列车解体和编组作业,并为此设置专用调车设备的车站称为编组站。所有改编列车都要在编组站解体并重新组成新的列车出发。编组站的工作质量和改编作业效率,对整个铁路网的通过能力、改编能力、作业安全、机车车辆周转、劳动条件等都起着重要作用。随着铁路运能紧张问题日益突出,编组站作业也越来越繁忙,驼峰调车自动化在提高作业效率、保证作业安全、降低劳动强度等方面起着举足轻重的作用,是铁路编组站向现代化发展的主要内容和重要标志。为此,研究驼峰场的联锁仿真软件具有重要意义。驼峰场计算机联锁应用到编组站驼峰自动化控制系统中,可提高作业效率、降低劳动强度,保障作业安全、可靠;该仿真研究在现场技术人员的培训及铁路信号专业的教学中,能够增强教学实践性,提高学员专业技能。
1 系统功能
本联锁仿真系统是基于Visual C++6.0开发的面相对象设计的软件。仿真系统的功能结构如图1所示。系统接收人机交互软件(上位机软件)发来的操作命令,进行联锁逻辑运算,模拟设备动作,将设备动态信息(I/O信息)反馈给上位机软件。软件主要包括联锁逻辑运算和仿真模拟两个模块。其中,联锁逻辑运算分为溜放进路联锁逻辑运算、调车进路联锁逻辑运算和非进路联锁逻辑运算3个方面。

图1 联锁仿真系统功能结构图
溜放进路依据溜放计划办理,驼峰信号机开放不同的信号显示。溜放过程中,根据作业计划及车组走行实迹自动控制各分路道岔转换,保证车组进入预定股道。溜放结束后给出相应表示。
调车进路按压始终端按钮办理,检查联锁条件,自动转换道岔、开放信号。随车列的走行,信号自动关闭、进路解锁。调车进路在信号开放后、车列尚未占用接近区段前可办理取消进路解锁;信号开放后、车列已占用接近区段但尚未越过信号机时,可办理人工解锁方式解锁。
非进路联锁作业一般是对某个单一信号设备的操作,包括对道岔的单操、单锁、单封、解封及故障解锁,模拟信号机灯丝断丝,模拟轨道区段故障占用和故障出清等。
由于本仿真软件未连接硬件设备,其仿真部分是通过软件不断读写INPUT表和OUTPUT表实现的。联锁软件联锁逻辑运算后更新OUTPUT表,模拟现场驱动;根据OUTPUT表的变化,对INPUT表中相应位置值模拟采集板;把更新后的INPUT表和OUTPUT表都反馈给上位机,以实现上位机的实时显示。
2 系统工作流程
根据软件结构设计和数据流程,软件启动后,首先初始化变量、函数、配置文件和TCP/IP通信,随后联锁软件将站场的初始化设备状态及仿真的采集驱动数据发送至上位机软件实现站场初始化显示。系统接收并解析上位机软件下达的作业命令,并根据当前站场设备状态进行联锁逻辑运算后将各类信息整合反馈给上位机软件,上位机软件的界面将实时动态地显示联锁系统的仿真结果。当检查到程序退出时,软件释放内存,退出系统。系统工作流程如图2所示。

图2 联锁软件工作流程图
3 系统实现
由图2可知,系统软件可划分为联锁数据结构、联锁逻辑运算和通信数据组织3个模块,分别就这3个模块详述系统软件的实现方法。
3.1 联锁数据及数据结构
在计算机联锁中参与联锁运算的数据称为联锁数据。本研究所有联锁配置数据写在TXT文件中,采用静态数据和动态数据两种数据形式。
所谓静态数据,即在系统中仅以读取方式操作而不做改写。对站场中出现的每一个信号设备,如道岔、信号机和轨道区段等,都设置相应的静态数据,包括设备ID、名称、左右位置关系、设备类型、所在咽喉等,程序中对各信号设备创建类并定义数组,存储相应静态数据。针对溜放进路编写包括溜放进路上的分路道岔及敌对始端信号机的溜放进路表,以便接收溜放命令后匹配进路表并及时自动排列溜放进路。
动态数据不断被程序访问并随联锁逻辑而改写。本仿真软件编写具有0-1状态的INPUT表和OUTPUT表,模拟6502电气集中里的继电器,例如信号机有DJ、DXJ、LXJ等,道岔有DBJ、FBJ、DCJ、FCJ等,轨道区段有DGJ等。通过读取INPUT表获取当前站场各设备状态,结合作业命令进行联锁逻辑运算后对OUTPUT表置位,以此操作设备。
3.2 联锁逻辑运算
系统的联锁逻辑处理包括溜放进路联锁处理、调车进路联锁处理和非进路联锁处理3类。下面详细分析这3类作业的联锁实现方式。
3.2.1 溜放进路联锁处理
溜放信号开放流程图如图3所示。溜放信号开放前,应将峰下第一分路道岔转换至第一溜放车组所需位置并锁闭道岔。驼峰信号机的防护范围是自到达场股道经到达场出站咽喉区进入驼峰调车场的推送部分、峰顶平台、溜放部分直至各条调车线,其信号显示方式:绿灯表示按规定速度推送;绿闪表示加速推送;黄闪表示减速推送;红闪指示机车车辆自驼峰后退;白闪指示机车去禁溜线;白灯指示机车到峰下;黄灯表示预先推送;红灯表示停车。
溜放开始后,软件对下溜车组进行全程跟踪,根据作业计划及车组的走行位置逐级传递命令,自动控制道岔转换,使车组进入预定轨道。当车组占用某一道岔区段后,开始节点搜索自动匹配到下一道岔区段,将道岔转换到所需位置并锁闭。
3.2.2 调车进路联锁处理
调车进路作业包括进路选排、解锁、取消进路、人工解锁等。下面举例详述进路选排的联锁处理方式。
系统收到选路命令后:(1)确定进路始终端、进路方向并记录该进路。(2)以节点搜索的方式对该进路上每一个信号设备分成若干个阶段处理。
ROUTEPROVE阶段从进路终端开始,检查进路中各信号设备是否故障或被其它进路占用;SETMARK阶段从进路终端开始,给各信号设备置占用标记,选出进路中所有信号机、道岔和轨道区段;BEFORELOCK从终端开始检查进路中道岔位置并将道岔转换到所需位置;SETLOCK阶段从始端开始锁闭进路中各道岔及轨道区段;CLEARSIGNAL阶段从进路终端开始检查信号机的开放条件,由远及近开放信号。
3.2.3 非进路联锁处理
非进路联锁作业一般是对某个单一信号设备的操作。操作道岔时,先检查该道岔未标记或未锁闭,再单独对其进行或转换或锁闭等操作(峰下道岔应迅速转换而不延时)。模拟信号机和轨道区段故障时,接收故障命令后直接给INPUT、OUTPUT表中相关继电器置位,如DSJ、DGJ等。
3.3 通信数据组织
系统完成联锁处理后将站场信号设备状态及采集、驱动信息及时更新至上位机以实时显示。其中,采集、驱动信息上文已有介绍,信号设备状态指该设备正处于进路处理的哪个阶段。在联锁处理中记录设备情况,上位机用来绘制不同状态下的信号设备。信号机的状态有标记、锁闭、闪光、延时180s、延时30s等,道岔的状态有标记、锁闭、失去表示等,轨道区段的状态有标记、锁闭、占用等。
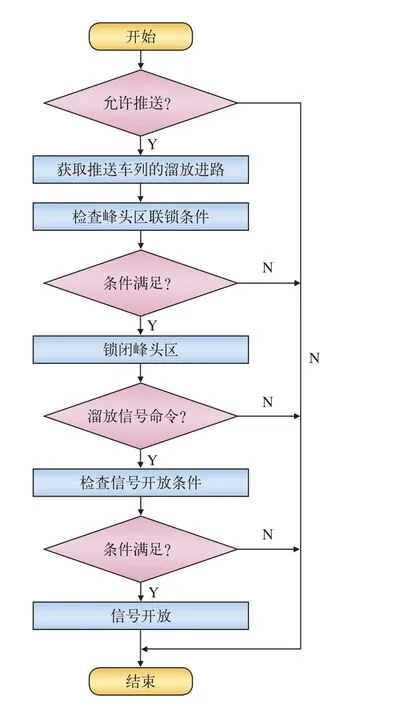
图3 信号开放流程图
4 结束语
本文在Windows平台下,以VC++为开发工具,采用模块化设计,研究开发了一套功能强、造价低、灵活性较高的驼峰场联锁仿真软件,经过多次试验与调试,软件运行稳定,具备一定的完整性和通用性,可基本满足铁路信号工作人员的学习和培训需求。
[1] 吴芳美.编组站调车自动控制[M].北京:中国铁道出版社,1995.
[2] 杨 扬.车站信号控制系统[M].成都:西南交通大学出版社,2012.
[3] 孙 鑫,余安萍.VC++深入详解[M].北京:电子工业出版社,2006.
[4] 宋玉华.铁路编组站驼峰自动化试验[J].铁道建筑技术,2012(5).
[5]王中林,刘忠信,吴 垠,等.基于无线网络的多智能体系仿真系统的设计[J].计算机工程与设计,2014(11).
[6]齐志华,姚亚平,高术强.基于CAN通信的计算机联锁IO仿真系统设计[J].铁路通信信号,2013(11).
责任编辑 方 圆
Interlocking simulation platform of hump marshalling yard
CHEN Huilin, YANG Yang
( School of Information Science and Technology, Southwest Jiaotong University, Chendu 611756, China )
The article developed an interlocking simulation platform of hump marshalling yard, analyzed the functions, dataflow and implementation method of the platform, described the interlocking implementation of free rolling route and tracing method for free rolling cars, provided stage design idea of controlling route interlocking. Through repeatedly debugging, this software could meet the needs of railway signal professional teaching and training.
hump marshalling yard; interlocking simulation; free rolling; VC++6.0
U284.3∶TP39
A
1005-8451(2015)09-0040-03
2015-01-06
中国铁路总公司科技研究计划项目(2013X012-A-1,2013X012-A-2,2013X008-A)。
陈慧琳,在读硕士研究生;杨 扬,副教授。
