插秧机分插机构尺寸参数优化设计
2015-05-30孙淼赵凤芹
孙淼 赵凤芹
摘要:针对宽窄行分插机构建立尺寸优化模型;基于宽窄行分插机构的运动轨迹,反求分插机构的重要尺寸参数;解决约束条件多且复杂的问题,应用MATLAB中Fmincon函数对其求解;并将优化设计生成可视化设计系统,便于该方法的有效推广,提高设计效率。
关键词:分插机构;插秧机;优化设计;可视化界面
中图分类号:S223.91+2 文献标识码:A 文章编号:1674-1161(2015)04-0040-03
分插机构是插秧机的核心工作部件,其性能的优劣直接影响插秧质量。交错轴斜齿行星轮系分插机构为水稻宽窄行种植的一种核心机构,其工作轨迹为复杂的空间海豚型轨迹,但是其优化方法尚不明确。为了优化宽窄行分插机构的尺寸,本文提出基于宽窄行分插机构的运动轨迹,建立分插机构的尺寸优化模型。
1 分插机构尺寸优化模型
1.1 设计参数
分插机构尺寸优化设计变量为:偏心距e、偏心齿轮半径R、中心距a、偏心齿轮螺旋角β、初始安装角φ0、行星架拐角δ0、栽植臂初始安装角α0和分插机构栽植臂S。模型的设计参数表述为:X=(e,R,a,α0,φ0,δ0,S,β)。
1.2 目标函数
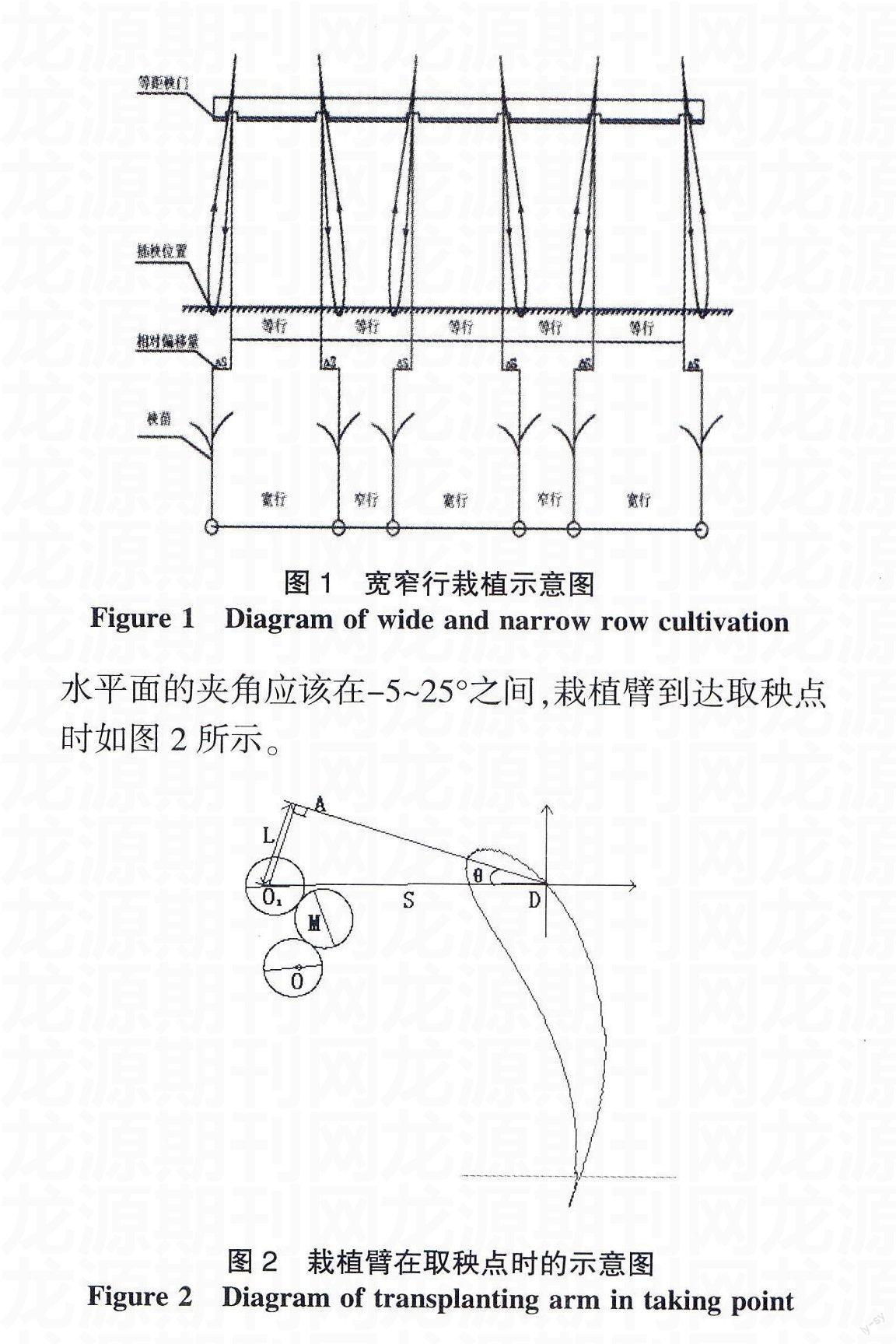
水稻宽窄行栽培技术是指水稻秧苗在单位总行数不变、穴距适当增加、穴数适当减少的条件下,把原来单一等距的行距变成宽窄相间、合理搭配的栽培方式,即宽行距40 cm、窄行距20 cm,如图1所示。
传统水稻插秧的行距为30 cm,为了达到水稻宽窄行种植的目的,设水稻插秧机作业时在纵方向偏移量△S=50 mm,并确定纵方向偏移量为优化目标。同时,栽植臂需要完成摘取秧苗和推送秧苗的过程,其绝对运动时插秧穴口的宽度也影响着秧苗的直立性,因而插秧轨迹的高度差△y、插秧穴口宽度△x同样为优化目标。
1.3 约束条件
1.3.1 取秧点 水稻插秧机在取秧时栽植臂的秧针与水平面的夹角应该在-5~25°之间,栽植臂到达取秧点时如图2所示。
通过插秧轨迹的高度差来最大限度地限制插秧轨迹的高度差,设定上、下限的范围为偏差±10 mm内。
1.3.6 其他约束条件 其他线性约束A,b由Rbmin-Rb≤0及给定的e,R,a界限确定。
1.4 优化计算的实现
将上述约束条件中的非线性约束条件存于fxxystj.m中,利用MATLAB的MAX及MIN函数完成各参数极值的寻找。给定初始值x0=[R e a φ0 δ0 α0 S β],调用目标函数及非线性约束条件语句为:[x,f]=fmincon ('myfunction',x0,A,b,[],[],[],[],'fxxystj'),将上述程序存于yhjieguo.m文件中,以方便后续回调函数中文件的调用。
2 参数化设计界面
2.1 界面设计
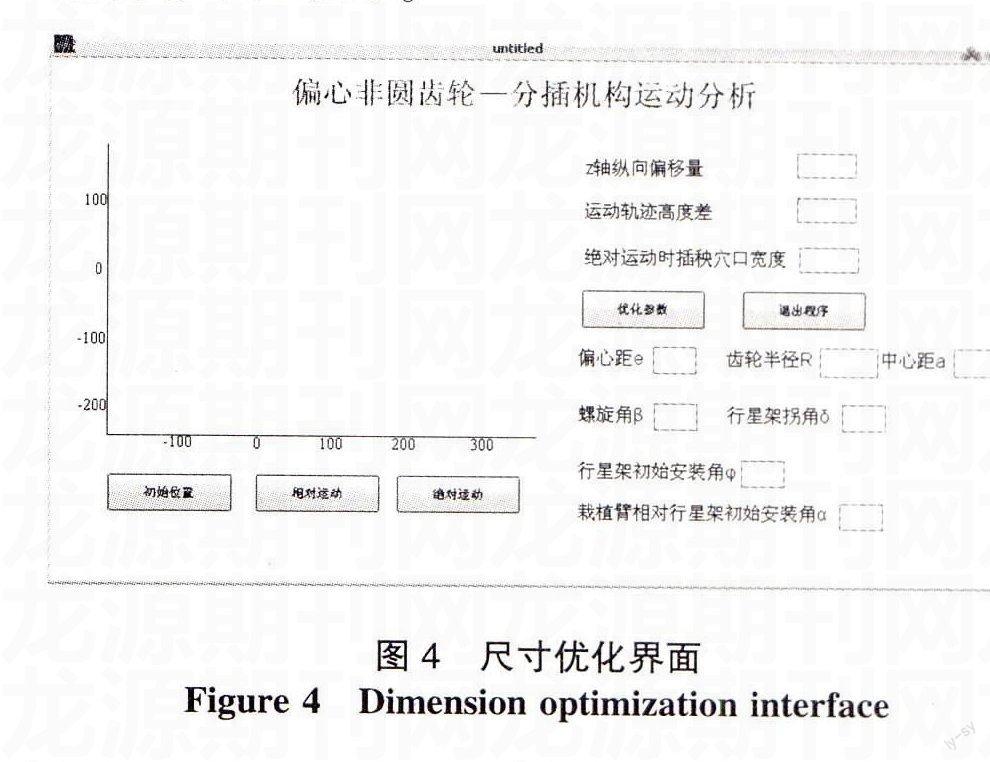
利用MATLAB中可视化设计工具GUI完成系统编辑,实现分插机构尺寸优化的可视化设计。尺寸优化界面如图4所示。
运算需输入已知参数值,求得在满足条件范围的偏心齿轮半径等值。运算结束后,输出各参变量的值,显示水稻插秧机分插机构尺寸的最优解。最优化程序编辑完成并存于M文件中,实现优化需调用yhjieguo.m文件。偏心非圆齿齿轮的优化结果界面如图5所示。
2.2 程序设计
首先将运动规律输入到MATLAB中,非线性约束条件fxxystj.m文件中通过f=str2num (get(handles.edit1,'String'))函数获得运动参数值,通过set(handles.edit11,'string',num2str(alpha))函数来显示优化结果。
3 优化结果
根据约束条件的描述,给定R,e,a,φ0,δ0,S,β的界限:18 mm≤R≤2 mm,3 mm≤e≤5 mm,36 mm≤a≤42 mm,4°≤φ0≤12°,70°≤δ0≤90°,-90°≤α0≤
-100°,170 mm≤S≤180 mm,8°≤β≤20°。确定优化变量初值:x0=[e R a φ0 δ0 α0 S β]=[4 19 38 5 80 -95 180 15],根据选定的Fmincon函数进行运算,选定高度差为250 mm,绝对运动中插秧穴口宽度为23 mm,秧针在纵方向的位移偏移量为50 mm。优化结果与原数据见表1。
优化后分插机构的纵向运动范围△S=50 mm,通过数据对比可知,优化效果明显,实现了优化目的。应用MATLAB工具进行优化求解,具有简单易行、便于设计师使用的特点,可将设计师从繁重、重复的设计、计算中解放出来,从而提高了产品的设计效率。
参考文献
[1] 吕美巧.我国水稻种植机械化概况及发展方向[J].湖南农机,2010(3):3-4.
[2] 原思聪.MATLAB语言及机械工程应用[M].北京:机械工业出版社,2008.
[3] 俞高红.旋转式分插机构运动学多目标非劣解群自动寻求[J].农业机械学报,2009(6):47-51.
Abstract: In the article, it built the model of dimension optimization according to wide and narrow row separating planting mechanism; based on the motion path of wide and narrow row separating planting mechanism, reversed to seek the important dimension parameters of separating planting mechanism; the constraint conditions are a lot and complex, for solving it, it used Fmincon function of MATLAB to solve; and upgraded the optimization design to visual design system, it is easy to effectively extend for the method, and raised the design efficiency.
Key words: separating planting mechanism; transplanter; optimization design; visual interface
