基于足地接触力跟踪的单足机器人弹跳运动控制
2015-05-05李满天查富生2孙立宁
尹 鹏,李满天,王 俊,查富生2,,孙立宁
(1.哈尔滨工业大学机器人技术与系统国家重点实验室,黑龙江 哈尔滨150001;2.哈尔滨工业大学超精密光电仪器工程研究所,黑龙江 哈尔滨150001;3.双钱集团(江苏)轮胎有限公司博士后创新基地,江苏 如皋226500)
0 引言
动物在跑跳运动中,其肌肉、韧带、肌腱与骨骼系统作为有机整体呈现为类似单个弹簧的运动形式[1-3],其中弹性结构以被动运动的形式对运动中的能量进行吸收和释放,该模型已得到学术界的普遍接受和认可[4-5]。Raibert将弹性被动伸缩环节应用于机器人的腿部结构中,实现了平坦路面下单足、双足以及四足机器人在跳跃步态下的稳定控制[6-7]。足式机器人在运动中,地面刚度的变化会对其原有状态产生干扰,使之运动状态发生偏离。动物和人在运动中会通过腿部刚度的调整,以应对不同的地面刚度变化,保证其整体特性不受影响[8],当机体运动不发生变化时,其足地接触力会保持原有的状态。由此,对于做弹跳运动的机器人单腿结构,可以通过控制其足地接触力的方式,来消除在竖直方向地面刚度变化对弹跳运动的影响,使其机体弹跳运动保持连贯和一致的输出特性。
1 单腿弹跳运动模型
1.1 单腿弹跳基本模型
针对当地面刚度发生变化时,维持足式机器人在竖直方向弹跳运动一致性的问题进行研究。因此,对机器人以及地面的模型进行简化,只将其视为单腿在弹性地面上进行竖直方向的单自由度运动,此时腿部构型等效为具有弹性被动伸缩特性的直腿,将地面刚度的改变视为在原有理想系统基础上加入的干扰因素;忽略运动中阻尼以及足地接触时碰撞造成的能量损失。单腿模型的弹跳运动可分为腾空相和着地相2种不同的状态,如图1所示。
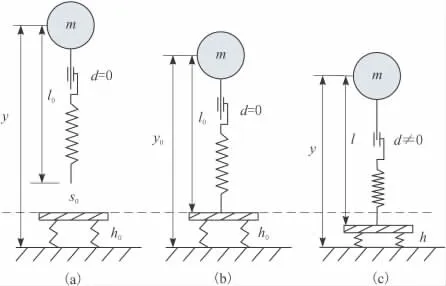
图1 单腿弹跳弹簧-质量系统模型
模型中机器人单腿由质量单元、无质量属性的直线伸缩弹簧单腿以及对足底力进行主动控制的直线驱动电机单元组成。其中,直线电机单元与腿部弹簧串联,置于弹簧和机体质量之间,通过对腿部弹簧上端的连接位置施加控制位移d可以改变初始腿长,从而实现在着地相时调整弹簧的压缩量对足地接触力进行调整;具有弹性的地面在模型中表示为无质量属性的平板,通过弹簧与基座连接。在图1中,质量单元m为机器人单腿模型的整体质量;Ks为机器人单腿的等效直线刚度;Kg为地面弹簧的刚度。单腿模型重心相对于基座的高度为y;单腿的初始长度为l0+d,l0为未进行腿长调整时的单腿长度;与地面接触后腿长压缩为l。当单腿模型处于腾空相时,地面没有受到足-地接触力作用,其与基座之间处于初始距离h0,当单腿处于着地相时,地面与基座的距离压缩为h。
当表示地面的平板与基座为刚性连接时,模型中始终有h=h0,因此该单腿弹跳系统为典型的弹簧-质量系统。将该状态设为系统的理想状态,当地面刚度变化对系统施加干扰时,通过腿部驱动电机的主动控制,使得其模型重心的弹跳运动特性与理想状态保持一致。
1.2 单腿弹跳模型分析
为了便于针对不同地面刚度条件下的单腿弹跳模型运动进行计算仿真和控制,对模型中的状态作出以下假设:假设在单腿弹跳到达最高点时,即当单腿在腾空相且速度为零时,单腿模型中的腿长控制量d恢复为零,腿长l以及地面距离基座的距离h分别恢复为初始值l0和h0。
将模型赋予一定初始高度,则质量弹簧系统在重力作用下将能够维持一定的弹跳循环状态,其运动过程在腾空相和着地相2种状态之间循环切换。在单腿运动模型中忽略了能量的损失,在腾空相中m¨y=mg,g为重力加速度。因此,当弹跳中没有能量输入的情况下其腾空高度将保持不变,其腾空相的运动不会受到地面刚度变化的影响。
将模型中的机体质量作为点质量,在着地相时机体受到重力以及弹簧传递的地面接触力的作用,使其运动会受到地面刚度变化的影响。着地相动力学方程为:

在单腿单自由度弹跳模型中,腿部弹簧和地面弹簧组成弹性串联系统,在不计弹簧以及地面的质量属性的情况下,根据图1中的位置关系,着地相时弹簧对机体的作用力为:

K=KsKg/(Ks+Kg),表示由腿部弹簧和地面组成的系统整体刚度。将式(2)代入式(1),可得到该单腿模型在着地相时的运动微分方程,即

将单腿着地相中时刻t0的重心位置y0和速度作为初始,计算单腿弹跳时着地相的重心运动A=K/m,B=A(l0+d+h0)-g,单腿着地相运动为:
式(4)为单腿弹跳模型着地相时的一般方程,A和B中的整体刚度K以及腿长调整量d会根据环境中地面刚度Kg,以及仿真和控制的需要,进行必要的调整。
2 基于足力跟踪的弹跳控制
2.1 地面刚度对单腿弹跳的影响
在一般情况下,模型中地面与基座之间为弹性连接,如图1所示。当单腿模型中弹簧刚度保持恒定时,地面刚度的变化会使得整体刚度K发生改变,进而影响单腿运动的轨迹随时间的关系。单腿初始下落时足端距离地面的高度为s0,此时重心距离基座的距离y为l0+d+s0+h0,其中d=0,没有引入主动控制。在相同运动初始条件下,机器人单腿在不同地面刚度条件的弹跳运动以及对应的足地接触力如图2所示。其中,实线表示理想状态下单腿的机体重心以及足端的运动参数,虚线分别表示不同地面接触刚度下相应的运动。对比图1中不同地面接触刚度下的运动轨迹,可知随着模型中足地接触刚度的减小,单腿着地后需要更长的距离来吸收下落的能量,着地相的时间也随之增加。
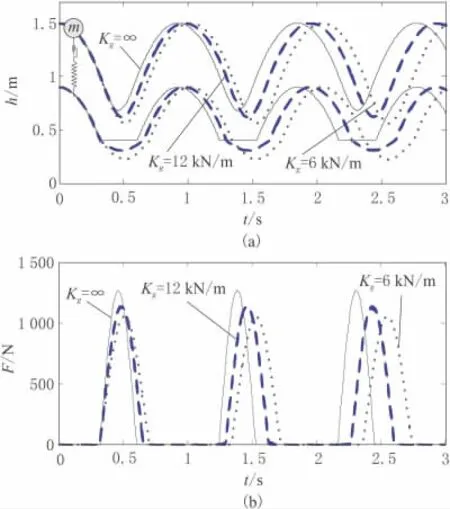
图2 不同地面刚度下的单腿弹跳运动
忽略模型中能量的耗损,单腿将会持续进行周期性的弹跳运动。当引入地面弹性形变后,整体刚度的降低使得相同位移下足底作用力降低,从而导致单腿模型的弹跳周期和幅度都有所增加。对于单腿模型,足地之间的接触力是除重力之外受到的唯一外力,会对单腿的弹跳运动产生直接影响。单腿模型在相同的初始高度自由下落产生持续的弹跳运动,在着地相中可以通过主动控制的方式改变弹簧系统的压缩行程,从而使其接触力大小与理想状态在对应时刻保持一致,使单腿在着地相以及腾空相的运动状态保持恒定。
2.2 弹跳中的地面刚度辨识
地面刚度的变化会对单腿弹跳模型的弹跳轨迹、足地接触力产生明显影响。在弹跳仿真过程中,弹跳控制系统不能直接获得地面刚度的变化,因此,需要控制系统能够在运动中辨识地面刚度的变化,进而根据地面刚度的变化,调整控制参数,计算调整模型腿长控制输出,实现较好的控制效果。在理想仿真条件下,地面与单腿均为无质量单元,地面在弹性形变过程中无阻尼输入。因此,在足端与地面接触的过程中,可以通过足-地接触力以及地面弹性形变差分,计算地面的刚度输出Kg,e,并将其作为地面的实际刚度进行控制模型的修正。式(5)中,地面高度h可以通过机体的高度以及当前状态下的单腿长度计算得到。

2.3 弹跳中的足地接触力补偿控制
理想状态下单腿弹跳模型能够保持稳定连续的弹跳运动,不需要主动控制,此时d=0。系统地面刚度Kg趋近无穷大,从而可认为系统的整体刚度K=Kd=Ks。当足端与地面接触时其状态由腾空相转为着地相,以此时单腿重心的运动参数y0=l0+h0,=-作为初始值,通过式(4)可计算出理想状态下着地相的运动轨迹yd,并将其作为期望的运动方程。此时,式(4)中A=Ks/m,B=A(l0+h0)-g。在此基础上,可以得到理想弹跳运动中足地作用力Fg,d的方程为:

当地面存在弹性位移时,单腿在着地相中,其腿部弹簧与地面弹簧构成的整体串联刚度为K=Ka=KsKg,e/(Ks+Kg,e),在与理想状态相同初始条件下,需要引入对腿长的主动控制量d才能够保持其运动状态不变。由式(4)得到此时单腿重心的运动方程ya,并据此得到足端与地面的接触力为:

当前足地接触力与期望值之间偏差的补偿,通过主动控制直线驱动电机单元实现。当未校正足力小于期望足力时,电机单元驱动腿部弹簧上端点向下运动,以进一步压缩弹簧,当足力超过期望值时,则通过电机单元对弹簧的压缩量进行释放,系统控制结构如图3所示。对于腾空相,当着地相时的控制能够满足足力跟踪要求,则在相同初始条件下能够保证其运动的一致。
将直线驱动电机单元的位移d作为单腿弹跳模型的控制输入,根据式(2)和式(3),可以得到单腿弹跳在着地相时,关于实际控制输入与实际足底接触力的微分方程为:
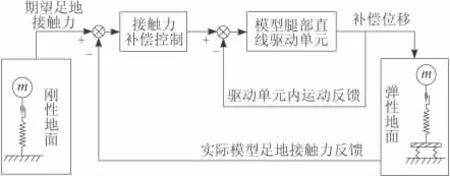
图3 带有足地接触力补偿的单腿弹跳控制

为消除重力加速度g对系统的影响,重新选取腿长控制量为:

此时,式(8)转化为:

系统实际控制量¨da与保持系统期望运动所需的期望控制输入之间的误差,会导致足地接触力Fg,a与期望接触力Fg,d之间的误差。为克服接触力误差对系统的影响,设计的腿长控制律为:
整个控制律包含3部分:含有期望足地接触力二阶导数的前馈补偿,实际足地接触力引起的加速度反馈补偿和关于接触力跟踪误差的PD控制单元。在该控制律作用下,将式(11)代入式(10)得到系统的闭环方程为:

eF=Fg,d-Fg,a,通过合理配置 PD控制单元的调节系数kp和kd,可使系统获得满意的动态跟踪效果。所采用的系数整定关系为:

将式(12)配置为临界阻尼状态,以实现系统力跟踪的无超调最快响应效果。
3 仿真实验
3.1 仿真模型的建立
为了验证在地面刚度变化条件下,基于足力跟踪的单腿弹跳控制方法,建立如图1所示的简化单腿弹跳系统模型。图1a表示单腿系统的初始状态,此时足端距离地面高度为s0,腿长以及地面距离参考基座的距离均设定为未压缩的初始状态。机体由静止开始自由下落直至足端与地面发生接触,如图1b所示,此时当地面与基座为刚性联接时,模型中的弹簧-质量系统将由机体质量以及腿部弹簧组成,运动循环中地面不存在位移。当地面与基座之间存在弹性时,系统运动如图1c所示,此时地面形变将会改变机体原有的运动轨迹。文中建立的系统模型的参数定义以及参数设定如表1所示。
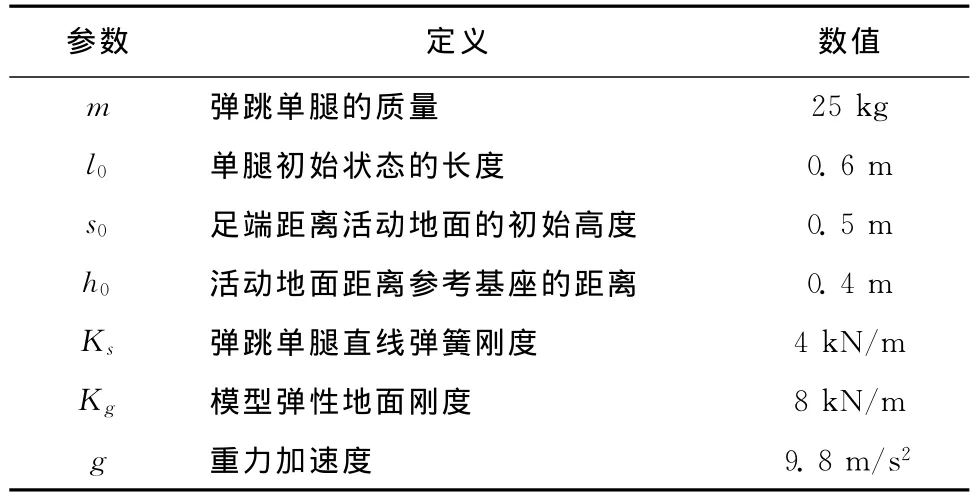
表1 单腿模型参数定义和数值
根据不同的地面刚度状态以及控制输入,将系统仿真分为3种不同的情况进行对比。以地面与基座为刚性联接时的单腿弹跳作为系统理想状态,此时控制输入为零,系统处于纯被动运动状态;当引入地面弹性形变干扰后,根据是否进行对腿长的主动控制,将单腿弹跳仿真分为受控与不受控2种系统。以理想状态作为期望的系统输出,将引入地面弹性干扰后未经控制的系统作为原始未受控系统。经过对原始未受控系统进行足地接触力跟踪校正后的系统为控制后的系统,其机体重心运动轨迹应当能够接近于理想系统。
3.2 基于足地接触力跟踪的弹跳实验
单腿从相同初始高度自由下落后,腿部弹簧、地面弹簧和机体质量组成的弹簧-质量系统,会在忽略能量损失的情况下维持稳定的弹跳循环。当地面刚度降低时,弹跳系统的整体刚度将低于理想系统中的刚度,降低了弹簧-质量系统的固有频率,从而导致其运动轨迹出现偏移。在未进行控制的情况下,单腿由相同高度自由下落至不同刚度的地面,其相应运动轨迹如4a所示。图4中,实线为刚性地面接触下的系统输出,虚线为弹跳过程中地面存在弹性形变。可以看出,地面刚度的降低增大了单腿的弹跳周期,地面弹性形变使得单腿弹跳中的重心运动最低点低于理想状态。由于模型中忽略了摩擦阻尼以及落地冲击等因素造成的能量损失,其弹跳最高点与理想状态仍保持一致。图5a为在没有引入主动的情况下,单腿处于不同地面刚度时的足地接触力,其中的图形定义与图4a相同。图5a中地面存在的弹性形变延长了单腿模型的弹跳周期,单腿模型的弹跳高度如图4a所示没有受到地面刚度变化的影响,其在腾空相的时间保持不变,使得单腿处于着地相的时间增多,并减小了其间最大足地接触力。
当引入对足地接触力的主动控制后,利用腿部的直线驱动单元改变腿部弹簧端点的运动,进而实现对弹簧进行主动压缩或释放,将弹簧的输出力调整为理想状态下对应时刻的足底接触力。当单腿处于着地相下降阶段时,足地接触力低于理想状态,应主动增加腿部初始长度,将弹簧在原有基础上进一步压缩;当单腿处于着地相中的上升阶段时,通过控制缩短腿长加快腿部弹簧释放的速度。图4b对比了相同运动初始条件时,理想状态以及经过足地接触力跟踪校正后的受扰系统的输出,对比机体重心的运动轨迹以及足端的轨迹可以看出,主动调整单腿的初始长度后,其重心运动的轨迹以及弹跳频率能够保持接近,单腿模型着地相中足端的运动轨迹相比未引入控制的有扰系统有了进一步的下沉运动。采用主动控制后足地接触力如图5b所示,能够较好地跟踪理想状态下期望的足地接触力轨迹。从仿真结果来看,弹跳机器人在不同地面刚度条件下,能够通过对足地接触力的跟踪,实现相同的重心运动轨迹,满足了不同地面条件下运动稳定性和平稳性的要求。

图4 足地接触力补偿前后的单腿弹跳运动轨迹对比

图5 足地接触力补偿前后的单腿弹跳地面接触力对比
在控制过程中,腿部驱动单元的输出速度以及位移如图6所示。能够看出,在地面刚度保持恒定的情况下,单腿模型在每个弹跳周期中所需的主动控制输出能够维持相同,说明该控制方法不会对单腿弹跳系统的弹跳稳定性产生影响。

图6 腿部驱动单元的控制位移以及速度
4 结束语
对单腿在弹跳中受地面刚度变化影响时所需的控制方法进行研究,在模型中对单腿结构以及物理属性进行了简化,与实际系统之间存在差异。基于对控制方法可行性的论证,在后续工作中将建立带有旋转关节的有质量属性的单腿弹跳系统,并考虑能量损失以及腿部惯量对单腿弹跳系统的影响,旨在能够使单腿弹跳机器人在变化的地面刚度条件下,保持平稳的周期弹跳运动。
[1] 张秀丽,郑浩峻,陈恳,等.机器人仿生学研究综述[J].机器人,2002,24(2):188-192.
[2] Heglund N C,Cavagna G A,Taylor C R.Energetics and mechanics of terrestrial locomotion.III.Energy changes of the centre of mass as a function of speed and body size in birds and mammals[J].Journal of Experimental Biology,1982,97(1):41-56.
[3] Full R J,Tu M S.Mechanics of six-legged runners[J].Journal of Experimental Biology,1990,148(1):129-146.
[4] Blickhan R.The spring-mass model for running and hopping[J].Journal of Biomechanics,1989,22(11/12):1217-1227.
[5] Bobbert M F,Richard Casius L J.Spring-like leg behaviour,musculoskeletal mechanics and control in maximum and submaximum height human hopping[J].Philosophical Transactions of the Royal Society B:Biological Sciences,2011,366(1570):1516-1529.
[6] Railbert M.Legged robot that balance[M ].Cambridge,Mass.MIT Press,1986.
[7] Raibert M,Blankespoor K,Nelson G.BigDog,the rough terrain quadruped robot[C]//Proceedings of the 17th World Congress,The International Federation of Automatic Control(IFAC),2008:10822-10825.
[8] Farley C T,Houdijk H H P,Strien C V,et al.Mechanism of leg stiffness adjustment for hopping on surfaces of different stiffness[J].Journal of Applied Physiology,1998,85(3):1044-1055.
