组网雷达站址误差对系统定位精度的影响
2015-04-25孙国政李景岩
孙国政,李景岩
(解放军91404部队,秦皇岛 066001)
0 引 言
组网雷达系统对目标的定位误差与目标相对于各雷达站的位置密切相关,为了评估系统的定位性能,可采用定位精度几何稀释(GDOP)作为评价指标。传感器在使用过程中不可避免地会引进误差,对于雷达组网系统的定位精度即GDOP,其误差来源主要有4种[1]:(1)坐标转换模型误差,即将各雷达的观测数据转换到融合处理中心的公共参考坐标系中去时所用转换模型导致的误差;(2)测量误差,即各雷达自身的方位测量误差、距离测量误差和仰角测量误差;(3)方位标定误差,即各雷达天线指北校正残差;(4)站址误差,即各雷达站址相对系统信息融合中心坐标原点的位置标定误差。
本文重点对站址误差进行了研究,讨论了雷达站址不准对组网雷达系统定位精度的影响,仿真计算了考虑站址误差的定位精度几何稀释(GDOP)的分布。从仿真结果可以看出,雷达站址误差对雷达网的定位精度有一定程度的影响,在站址误差较大时,将影响整个雷达网的定位精度。
1 定位精度几何稀释
为了评估雷达的定位性能,用定位精度几何稀释(GDOP)作为评价指标,单部雷达的GDOP的表达式可以表示为[2]:

对目标的定位是雷达的一项基本功能,一般雷达可以获得目标的距离r和方位φ,对于三坐标雷达还可以获得目标的仰角θ。假设雷达的测量误差矢量为δc= [δr,δθ,δφ]T,则测量误差的协方差矩阵为:
对于定位 误 差δd= [δx,δy,δz]T,则求偏导可得:
2 考虑站址误差的GDOP计算
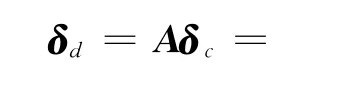
组网雷达对目标进行定位,假设网内共有N部雷达,其位置坐标为 (x li,y li,zli),同时对某一目标进行定位,得到目标在各雷达坐标系中的坐标为(rlii,θlii,φlii),其探测精度可以表示为 (σri,σθi,σφi),其中i=1,2,3…N,为雷达的编号,如图1所示。
图1 多雷达目标定位示意图
考虑各雷达系统误差的影响,并假设雷达系统固定误差为 (Δrli,Δθli,Δφli),不考虑地球曲率半径的影响,将目标坐标统一表示成直角坐标形式[3]:
由动态加权融合法[4],雷达组网后的探测精度可以表示为:
将式(9)代入式(1)中便可以得到雷达组网对目标的探测精度。
对于两坐标雷达,由于雷达只能获取目标的距离和方位,设雷达的坐标为(x li,y li),目标在各雷达中的坐标为 (rlii,φlii),其探测精度为 (σri,σφi),将目标坐标转换到统一直角坐标中:

对式(10)求全微分可得:

同样,由方差性质可得:

由动态加权融合法[4],同样可以得到:
将式(13)代入式(1)便可得到两坐标雷达的定位精度。
3 仿真与讨论
GDOP反映了雷达对目标的定位能力,雷达组网后可大幅度提高组网雷达的定位精度,为作战系统提供可靠的目标位置信息。本文以两坐标搜索雷达为例,仿真了不同雷达站址误差对组网雷达探测精度的影响,计算中采用的各雷达距离点迹精度为40×10-3km,方位点迹精度为4 mrad,各雷达的固定系统误差为Δr=40 m、Δφ=3.5 mrad。
图2~图5为不同站址误差对单部雷达定位精度的影响,雷达坐标为(12 km,12 km),其中图2为不考虑站址误差情况下单部雷达GDOP分布,图3为站址误差为σx=1 m,σy=1 m情况下的单部雷达GDOP分布,图4为站址误差为σx=5 m,σy=5 m情况下的单部雷达GDOP分布,图5为站址误差为σx=10 m,σy=10 m 情况下的单部雷达 GDOP分布。
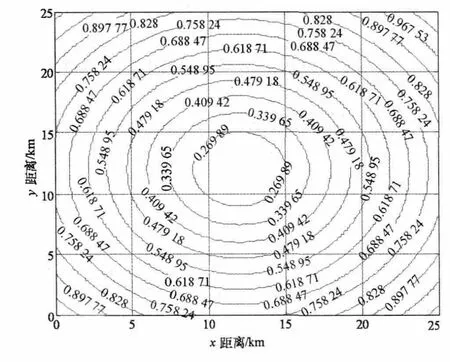
图2 不考虑站址误差单部雷达GDOP分布

图3 考虑站址误差单部雷达GDOP分布

图4 考虑站址误差单部雷达GDOP分布

图5 考虑站址误差单部雷达GDOP分布
图6~图9为不同站址误差对多部组网雷达定位精度的影响,3部雷达的位置坐标分别为(6 km,12 km)、(12 km,12 km)、(18 km,12 km),其中图6为不考虑站址误差3部雷达组网后的GDOP分布,图7为站址误差为σx=1 m,σy=1 m情况下3部雷达组网后的GDOP分布,图8为站址误差为σx=5 m,σy=5 m情况下3部雷达组网后的GDOP分布,图9为站址误差为σx=10 m,σy=10 m情况下3部雷达组网后的GDOP分布。
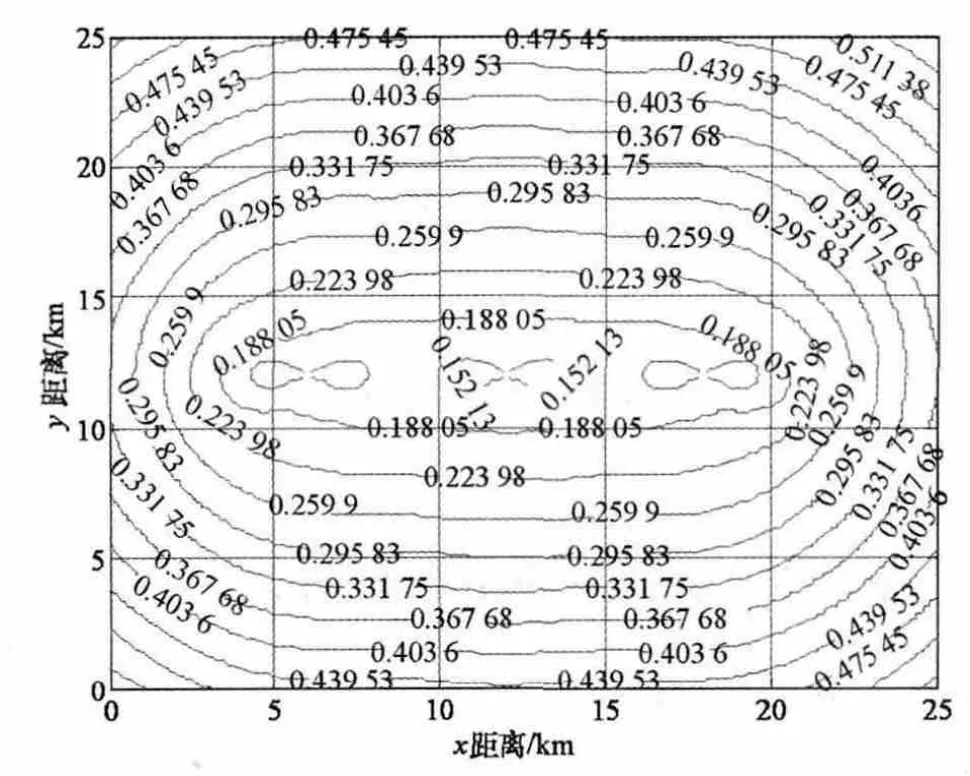
图6 不考虑站址误差3部雷达GDOP分布
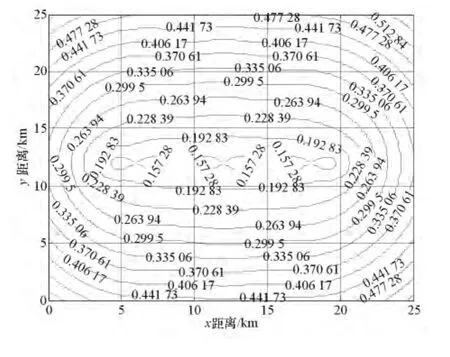
图7 考虑站址误差3部雷达GDOP分布
从仿真结果图9~图10可以看出,站址误差对雷达探测精度的影响是线性变化的,且对于同一目标点,站址误差对组网雷达定位精度的影响比单站雷达大。图10~图11为单站和组网雷达对空间一点(13 km,14 km)的探测精度随站址误差的变化情况。
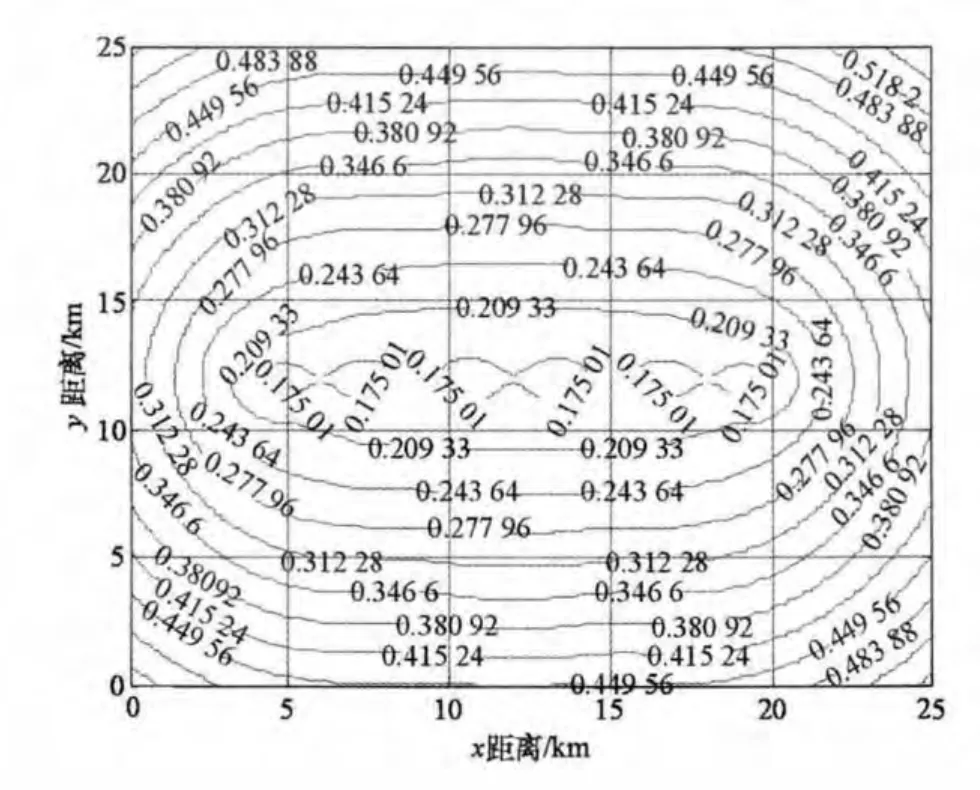
图8 考虑站址误差3部雷达GDOP分布
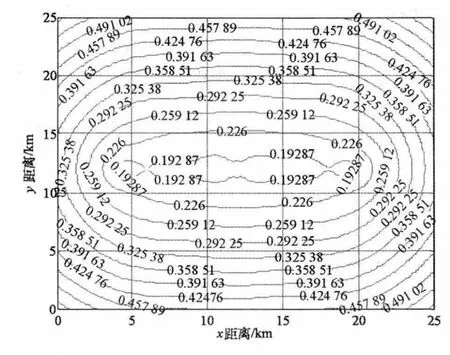
图9 考虑站址误差3部雷达GDOP分布
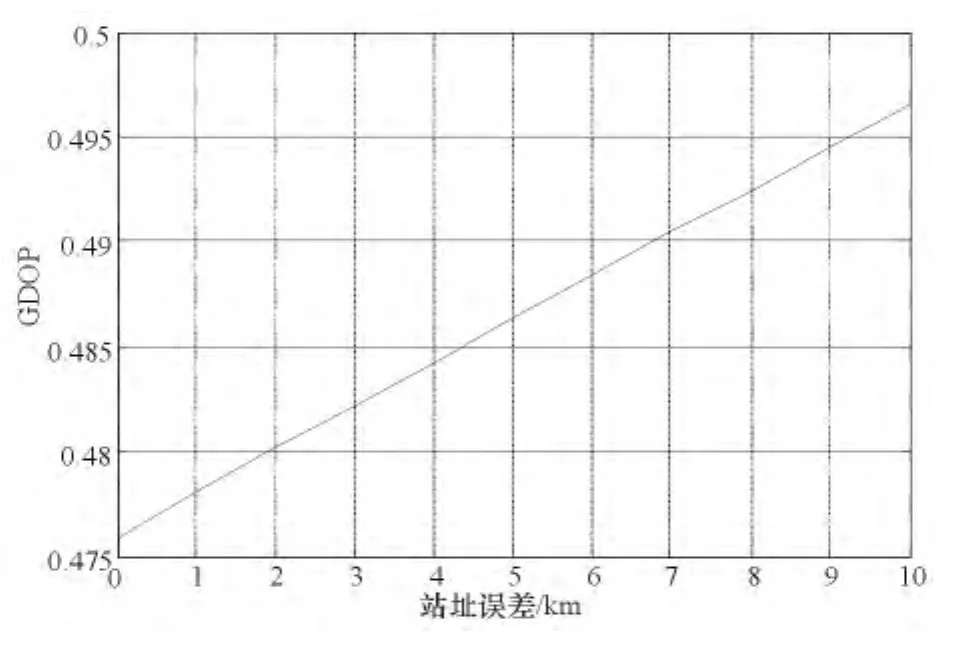
图10 单站雷达GDOP随站址误差分布
从仿真结果图2~图9可以看出,雷达自身站址误差对组网雷达系统的定位误差是有影响的,在站址误差较大时,其造成的影响是不可忽略的。一般情况下GPS的定位精度在10 m以内,有的GPS定位精度在1 m以内站址误差较小时,其对雷达组网系统的定位精度影响基本可以忽略。另外,雷达组网后对目标的探测精度比单部雷达有明显的提高,这主要是因为各雷达站的站址误差,雷达组网充分地利用了各个雷达站对目标的测量信息,实现了测量数据的冗余。
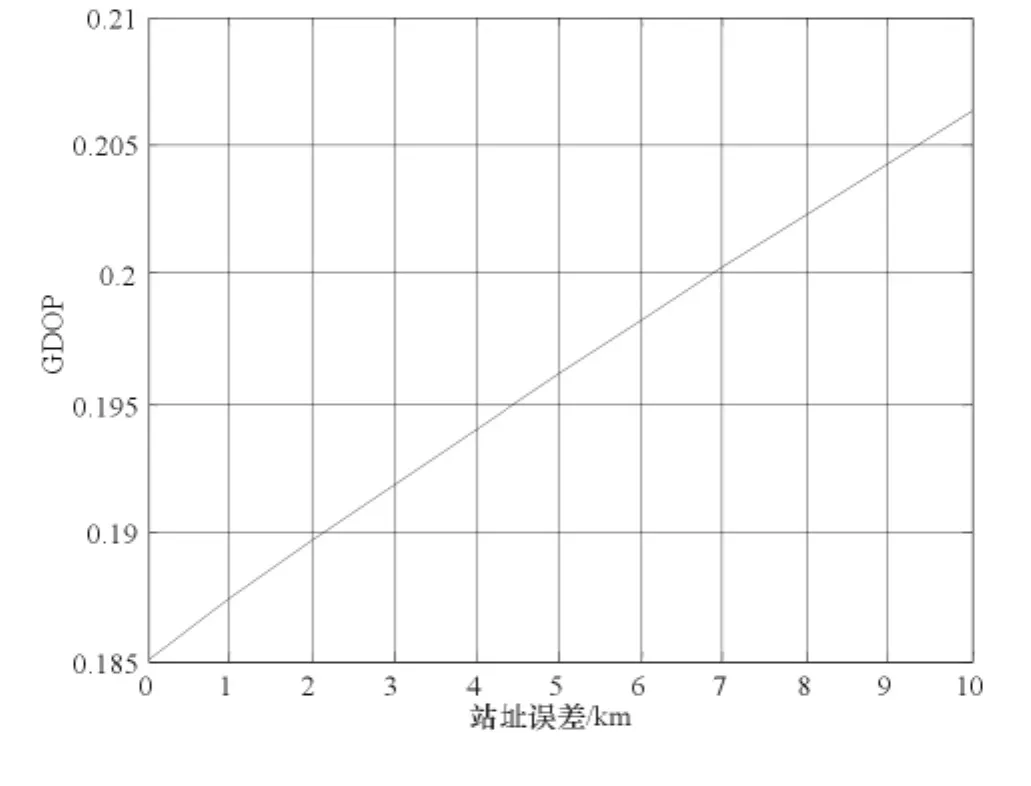
图11 组网雷达GDOP随站址误差分布
4 结束语
本文讨论了雷达站址误差对组网雷达系统定位精度的影响,仿真计算了考虑站址误差的组网雷达定位精度几何稀释的分布,其对雷达网的定位精度有一定程度的影响,但在一般情况下雷达站的GPS定位误差小于10 m,站址误差相对于其它误差对组网雷达定位精度的影响较小。另外,站址误差对雷达定位精度的影响是线性的,站址误差对组网雷达定位精度的影响要比单站雷达大。
[1]林宏亮,李侠,花浪发,孙金峰.雷达组网系统目标定位精度评估模型[J].火力与指挥控制2008,33(11):81-84.
[2]陈永光,李修和,沈阳.组网雷达作战能力分析与评估[M].北京:国防工业出版社,2006.
[3]唐小明,朱洪伟,何友.高志永.系统误差对GDOP的影响分 析 [J].计 算 机 与 数 学 工 程,2013,41(6):901-903.
[4]赵志超,刘义,马震.多雷达定位的动态加权融合算法及其精度分析[J].电光与控制,2010,17(5):35-37.
