考虑齿圈柔性的行星传动系统固有特性与灵敏度研究
2015-03-14陶庆孙文磊周建星
陶庆,孙文磊,周建星,2
(1.新疆大学机械工程学院,830047,乌鲁木齐;2.新疆大学机械工程学院机械工程博士后流动站,830047,乌鲁木齐)
考虑齿圈柔性的行星传动系统固有特性与灵敏度研究
陶庆1,孙文磊1,周建星1,2
(1.新疆大学机械工程学院,830047,乌鲁木齐;2.新疆大学机械工程学院机械工程博士后流动站,830047,乌鲁木齐)
为有效地模拟行星齿轮传动系统齿圈结构柔性,采用有限元方法建立了齿圈结构模型,依据啮合力与内齿圈的变形协调关系建立了传动系统刚-柔耦合动力学模型,求解了系统固有频率与振型,阐述了耦合系统固有频率的分布规律,依据系统振动特征,将系统振型划分为6种振动模式。计算了系统刚度对各阶固有频率的灵敏度,可作为行星传动系统振动抑制的依据,分析了系统扭转振动随太阳轮扭转刚度和太阳轮与行星轮啮合刚度的变化规律,讨论了齿圈厚度对系统固有频率分布、子系统耦合阶次与振动模式的影响,发现系统固有频率均会在齿轮子系统扭转振动频率位置出现,但随着齿圈厚度的增加,与之耦合的齿圈振动模式则逐渐由高阶节径振动逐渐降低,系统一阶振型也会由齿圈节径振动模式转变为齿圈刚体振动模式。
行星齿轮传动;动力学模型;刚-柔耦合;固有频率;灵敏度
行星齿轮传动系统以结构紧凑、传动比范围大、传动效率高等优点,在各种机器和机械装备中被广泛使用,其力学行为和工作性能对整个机器性能有重要影响。
在高速重载传动装置中,如直升机传动、船舶传动等,行星齿轮传动已成为主动力系统中不可缺少的关键设备。行星齿轮传动系统的运转稳定性与动态性能直接关系着装备的整体性能,故国内外学者针对动态特性开展了大量的研究工作。目前在研究行星齿轮系统动态特性时最常用的建模方法仍为集中参数法,该方法具有一定的准确性,且求解时间较短[1],但为计入齿圈柔性对系统动态特性的影响,有学者逐渐开始探讨新的建模方法。Ambarisha等采用有限元法建立了行星齿轮传动系统模型[2],用二维接触来模拟齿轮啮合,为了减少计算量,采用了一种独特的半分析有限元公式。Singh等进一步建立了三维有限元接触模型[3],对系统均载特性进行了系统分析。Bajer等建立了行星传动系统动态接触动力学模型[4],模型中包括刚性和柔性组件,各组件均通过接触相互作用。宋轶民等将连续体的柔性齿圈离散成由等效弹簧连接的刚性齿圈段,研究发现齿圈的柔性会影响系统的低阶固有频率,影响程度与齿圈安装方式有关[5]。Wu等发现齿圈的柔性会为系统引入齿圈节径振动模式,并与其他零件振动产生耦合作用[6]。Kahraman等研究了齿圈轮缘厚度对齿圈变形、应力及均载系数的影响[7],发现轮缘厚度较小时,齿圈弯曲变形起主导作用,随着厚度增大,齿圈应力最大位置由齿槽逐渐转移至齿根,而对均载性能的影响不大。Avinash以完整的行星齿轮系统模型为分析对象,就行星轮及太阳轮刚度对均载性能的影响做出了讨论[8]。分布质量模型虽然可以有效地表现出齿圈柔性,但求解周期较长,并且现有研究大多为准动态计算[7-8]。
为避免过大的工程计算量和更清晰地表现行星传动的振型,本文提出一种采用有限元法计入齿圈柔性的行星传动系统耦合建模方法。总结了系统固有频率分布规律与系统振动模式,讨论了齿圈柔性、系统刚度对行星齿轮传动系统固有特性的影响。
1 分析模型
1.1 齿轮传动子系统模型构建
本文分析了2K-H行星齿轮传动系统,系统中的3个行星轮均布安装。系统动力学模型如图1所示,图中标识r代表内齿圈,s代表太阳轮,p代表行星轮,c代表行星架,k为刚度,θ为转角。
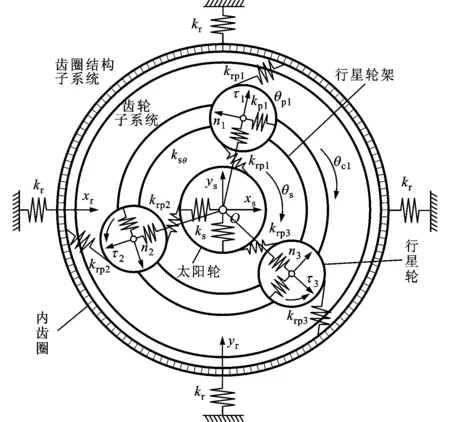
图1 行星齿轮传动力学模型
各零件的支承刚度、扭转刚度及齿轮啮合刚度用弹簧来代替,取行星架中心为坐标原点,系统模型构建时取水平方向为x方向,竖直方向为y方向。模型中ks为太阳轮柔性支承刚度,ksθ为太阳轮柔性支承刚度,行星轮采用轴承支承,kpi为第i(i=1,2,3)个行星轮支承刚度,kr为内齿圈支承刚度,采用4个对称位置来对齿圈结构进行约束。模型中kspi与krpi分别代表太阳轮与行星轮及行星轮与内齿圈的啮合刚度。
系统广义坐标中X,Y为横向微位移,θ为扭转微位移。经推导可以得到太阳轮与行星轮啮合力为
Pspi=kspi[XssinAi+YscosAi+us-
Xpisinα-Ypicosα-upi-espi(t)]
(1)
对于齿轮子系统,与传统的行星传动系统建模方法相同,通过分析各个零件在理想位置的受力情况,可建立齿轮传动子系统的动力学模型为
(2)
式中:[M]为质量阵;[C]为阻尼阵;[k(t,x)]为刚度阵;{X}为位移向量;{P(t)}为激励力向量。
传动系统基本参数如表1所示,各零件支承刚度与齿轮啮合刚度采用有限元方法计算,计算方法参照文献[9]。

表1 行星齿轮传动系统参数
1.2 行星传动系统耦合模型构建
当构建齿圈有限元模型时,采用有限元方法,各节点坐标与齿轮子系统参考坐标系重合。在动态啮合力作用下,对于任意瞬态,齿圈节点发生虚位移{δu}e,而单元内也产生相应的虚位移{δu}和虚应变{δε}。单元内产生的虚应变能为
(3)
外力所做的虚功为
δW1=
(4)
式中:FV为单元体载荷;FS为单元面载荷;Fe为集中力;V为单元体积;A为单元面积。

(5)
根据虚位移原理,有
δU=δW1+δW2
(6)
代入经整理可得单元运动微分方程
(7)
图2 行星齿轮传动力学模型
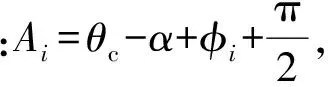
传动系统与齿圈结构通过耦合节点产生作用,如图2所示,耦合节点所承受的集中力和行星轮与内齿圈啮合力相平衡,即
Fie=Prpi
(8)
将耦合节点位移,投影至行星轮与内齿圈的啮合线方向,则有啮合力为
Prpi=krpi[urpn+Xpisinα-Ypicosα+upi-erpi(t)]
(9)
式中:urpn为耦合节点位移在啮合线方向的投影;Xpi、Ypi为行星轮横向位移;upi为行星轮扭转微位移;erpi(t)为行星轮与内齿圈的啮合误差。
通过式(9)即可对齿轮子系统模型(2)与齿圈结构模型(7)进行耦合,耦合模型为
(10)
式中:[-R]、[-ka]均为耦合矩阵。
2 耦合系统固有特性分析
2.1 系统固有频率
系统固有特性可以转化为特征值问题,即
φi}={0}
(11)

(12)
式中:ωi为系统的第i阶固有频率;φi为系统的第i阶振型。
计入圈柔性后,系统中不仅包括太阳轮和行星轮的横向与扭转自由度,还有柔性齿圈结构各节点的自由度,故系统总固有频率大幅增加,该固有频率可分为两个频率段:一个在齿轮子系统与结构子系统耦合振动频率段,为低频段;另一个在齿圈结构振动的频率段,为高频段。低频段共包含系统36阶固有频率,如表2所示,固有频率范围为274.28~765 3 Hz。可以看到,齿圈结构与传动系统的耦合作用有效增加了系统柔性,使低阶固有频率较传统模型计算结果明显减小。
2.2 耦合系统振动模式
考虑齿圈柔性后系统振动模式更为复杂,系统前36阶固有频率出现了齿轮子系统与结构子系统耦合振动模式。
依据系统振动特征, 可将耦合振型分为纯齿圈结构节径振动模式、齿圈结构节径振动与中心构件横向振动耦合模式、齿圈节径振动与中心构件扭转振动耦合模式、齿圈局部振动与中心构件横向振动耦合模式、齿轮子系统振动模式、内齿圈局部振动模式6种模式。

表2 系统36阶固有频率
各振动模式的特征如下。
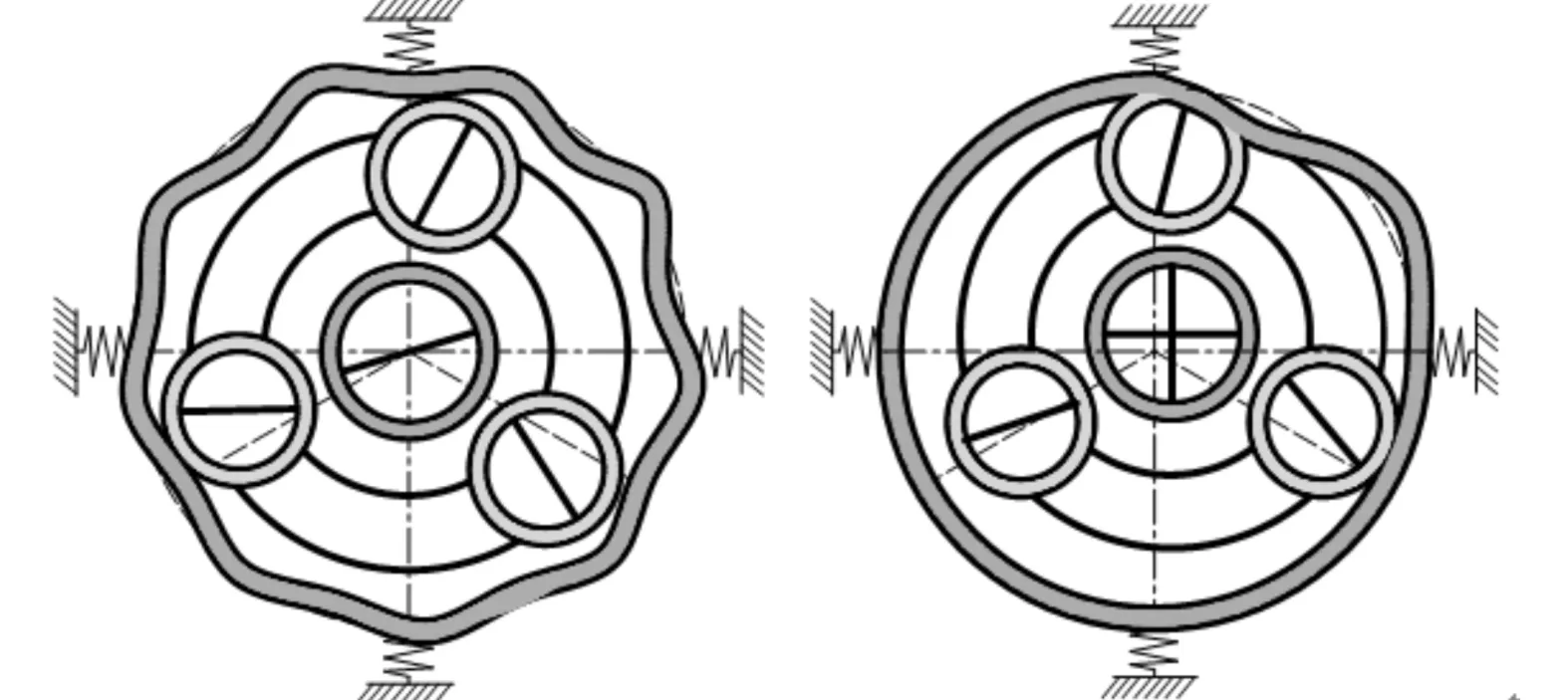
(1)纯内齿圈节径振动模式:该振动模式下系统中仅内齿圈产生节径振动,其他齿轮均未发生明显振动,如图3a所示,图中给出了齿圈3节径振动模式;该振动模式在前36阶系统固有频率中共出现6种纯节径振型,与之对应的是5个单重固有频率,分别对应于3、5、6、7、9节径振型,8节径振型对应有5个固有频率,共10个固有频率。
(2)齿圈节径振动与中心构件横向振动耦合模式:该振动模式下传动系统中心构件出现横向振动与内齿圈节径振动耦合振动模式,而太阳轮和行星架扭转方向上的振幅基本为0,内齿圈未发生整体横向与扭转振动,如图3b所示,图中给出了齿圈3节径振动与中心构件横向振动耦合模式;该振动模式共出现了6种耦合振型,其中内齿圈3节径与中心构件横向振动耦合振型对应3个单重固有频率,内齿圈9节径与中心构件横向振动耦合振型对应2个单重固有频率,内齿圈4、5、6、8节径耦合振动振型各1个,共计9个固有频率。
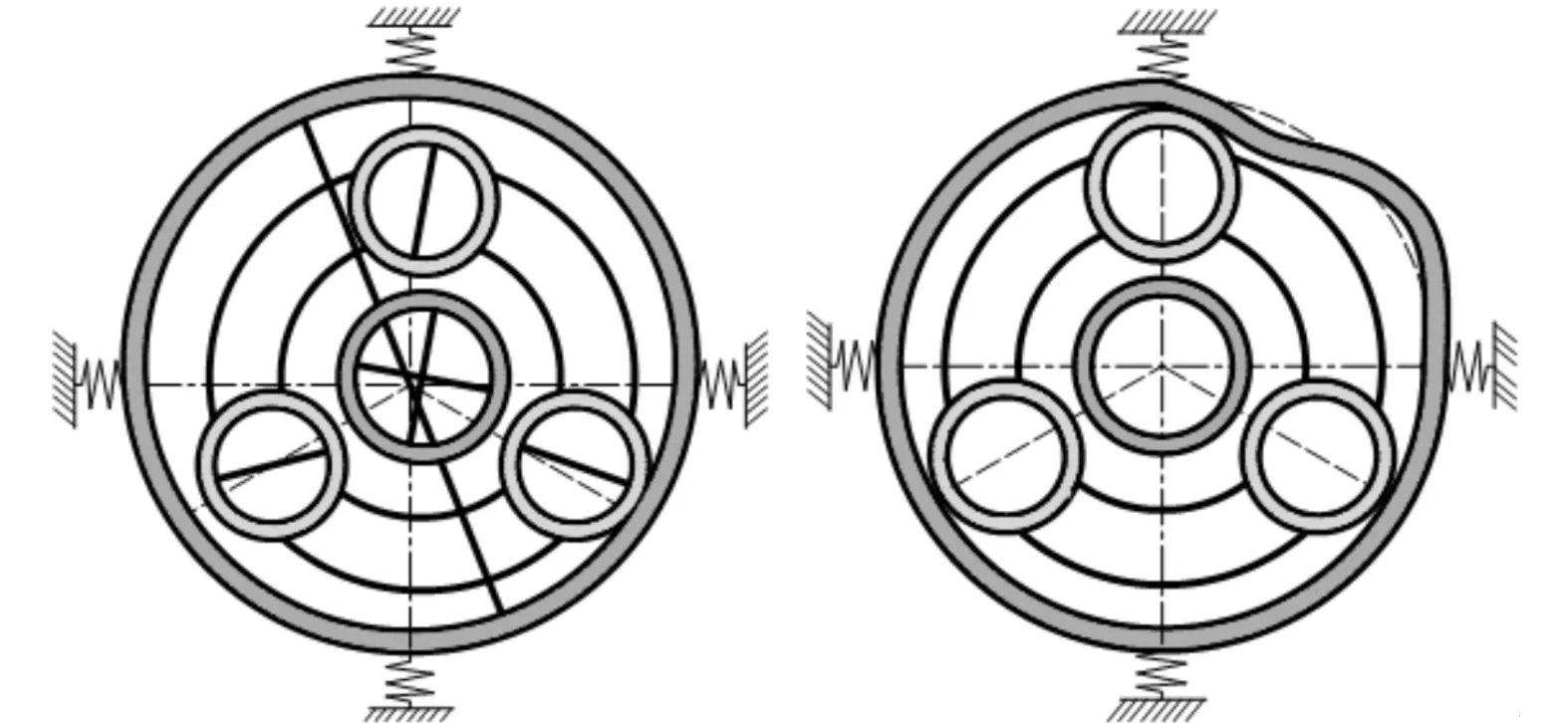
(3)齿圈节径振动与中心构件扭转振动耦合模式:该振动模式下系统中心构件出现了扭转振动与内齿圈节径振动耦合振动模式,太阳轮和行星架横向振幅基本为0,内齿圈未发生整体横向与扭转振动,如图3c所示,图中给出了齿圈9节径振动与中心构件横向振动耦合模式;该振动模式共出现了2种耦合振型,齿圈9节径与中心构件扭转振动振型对应2个单重固有频率,内齿圈7节径与中心构件扭转振型对应1个单重固有频率,共计3个固有频率。
(4)齿圈局部振动与中心构件横向振动耦合模式:该振动模式下内齿圈出现局部振动耦合振动模式(即齿圈局部结构发生变形的振动模式),并与中心构件横向振动模式发生耦合,而太阳轮和行星架扭转振幅基本为0,如图3d所示,图中给出了齿圈局部振动与中心构件横向振动耦合模式;该振动模式共出现了2种耦合振型,可由齿圈结构振动不同的形式加以区分,各振型分别对应1个固有频率,共计2个固有频率。
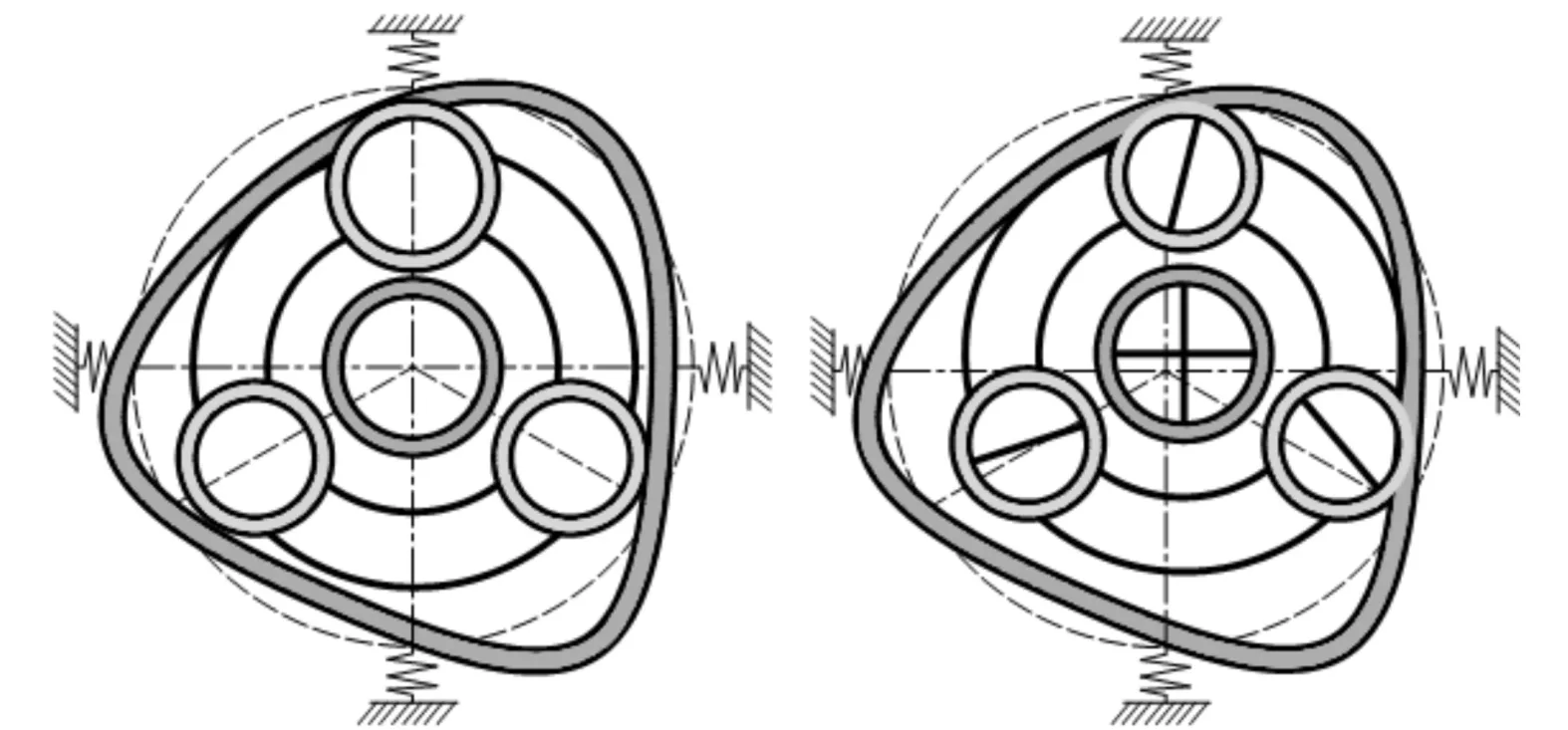
(a)齿圈3节径 (b) 齿圈3节径+ 中心构件横向振型
(c) 齿圈9节径+ (d) 齿圈局部振型+ 中心构件扭转振型 中心构件横向振型
(e) 中心构件扭转振型+ (f)齿圈局部振型 横向振型图3 计入齿圈柔性的行星传动系统振型
(5)齿轮振动模式:该振动模式下内齿圈仅存在整体振动,未发生结构振动模式,如图3e所示,该振动模式与刚性齿圈的振动模式一致;该振动模式出现了1种振型,即中心构件扭转横向振型,对应1个单重固有频率。
(6)齿圈局部振动模式:该振动模式下内齿圈仅存在结构局部振动模式,中心构件横向、扭转方向上的振幅全为0,如图3f所示;该振动模式共出现了11个单重固有频率。
3 齿圈柔性对系统固有特性的影响
3.1 齿圈柔性对中心构件扭转振动模式的影响
将齿轮子系统中行星轮与内齿圈的啮合弹簧外端固定,通过计算即可得到齿轮子系统固有频率,如表3所示,其中第6阶与第12阶为纯中心构件扭转振动模式。

表3 齿轮子系统的固有频率 Hz
通过反复试算发现,随着齿圈厚度的增加,齿圈结构刚度增大,系统各固有频率均随之逐渐增大,仅有系统扭转振动固有频率保持不变,但在齿轮子系统扭转振动固有频率(即子系统的第6阶2 858 Hz和第12阶7 668.4 Hz)附近波动。中心构件扭转固有频率随着齿圈厚度的变化如表4所示,各齿圈厚度均在2 858 Hz和7 668.4 Hz附近出现了固有频率,中心构件均为纯扭转振动模式,但随着齿圈厚度的增加,与之耦合的齿圈振动模式则逐渐由高阶齿圈节径振动向低阶转变。在2 858 Hz附近,齿圈结构厚度为13 mm时,其振动模式为7节径,第18阶。当齿圈增加至22 mm时,齿圈振动模式为4节径,第15阶。相对而言,子系统7 668.4 Hz是其最高阶固有频率,也具有相同的特征,同时该阶固有频率还决定了耦合系统的频率上限,各齿圈厚度系统最高阶固有频率均在7 668.4 Hz附近时,阶数将随着齿圈厚度的增加而逐渐减小,当齿圈厚度为13 mm时系统固有频率对应46阶,而齿圈厚度增至22 mm时系统固有频率对应38阶。
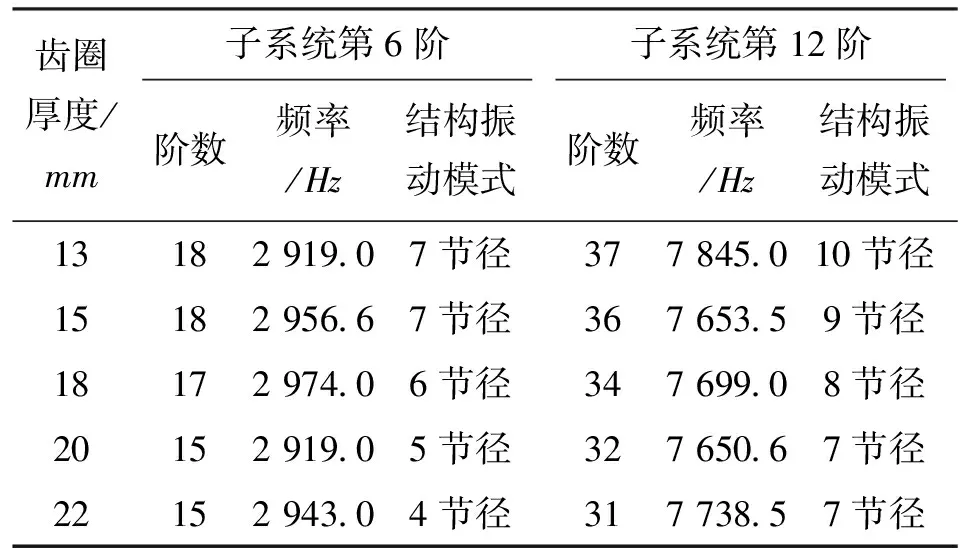
表4 齿圈厚度对中心构件扭转固有频率的影响
3.2 齿圈柔性对固有特性的影响
为量化描述齿圈柔性对系统固有特性的影响,本文定义刚度比
(13)
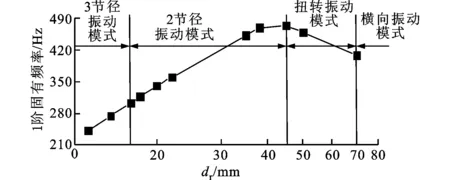
图4 不同齿圈厚度下系统1阶固有频率
4 系统刚度对固有特性的影响
4.1 系统刚度对固有频率的灵敏度
行星齿轮传动系统中各零件的支承刚度、质量及转动惯量均会对系统动态特性产生影响。工程中也常采用匹配参数来实现系统振动的被动控制。灵敏度分析是研究模型输出受各种输入变化影响的有效方法。本文采用有限差分法研究了各刚度对系统固有特性的影响,计算时假设系统刚度变量有一个微小的摄动Δk,其灵敏度可表示为
(14)
式中:ω(kj)为刚度为kj时系统的固有频率。
由于系统固有频率与刚度在数量级上差别较大,则对上式进行改进后有
(15)
式中:Δn为刚度增幅比例系数。
本文计算了ks、kr、krp和kp对系统各阶固有频率的灵敏度,其中系统各阶固有频率随太阳轮与内齿圈支承刚度的灵敏度如图5所示。可以看到,系统低阶时中心构件横向振动模式对太阳轮支承刚度ks的变化较为敏感,高阶时灵敏度均较小。系统2、3、4阶固有频率(313.46、411.86、556.64 Hz)灵敏度最大,对应的振型均为内齿圈3节径振动与中心轮横向振动耦合振型,其中3阶固有频率灵敏度达到80,远大于其他固有频率。ks对系统9阶(1 325 Hz)与13阶(1 809.8 Hz)影响较大,其中9阶为内齿圈局部5节径与中心构件横向振动耦合振型,13阶为内齿圈6节径振动与中心构件横向振动耦合振型。对于高阶振动(大于14阶),太阳轮支承刚度的影响不大,灵敏度均小于3。

图5 ks、kr对固有频率的灵敏度
与太阳轮支承刚度相反,内齿圈支承刚度的变化对低阶固有频率影响不大,而对部分高阶固有频率的灵敏度较大,如24、28、34阶中28阶固有频率灵敏度最大,为206。就振型而言,内齿圈支承刚度对齿圈结构局部振动模式影响更为明显,如28、34阶。
krpi与kp对系统各阶固有频率的灵敏度如图6所示。可以看到,由于krpi与kr分别分布于齿圈结构内外两侧,故krpi对固有频率的灵敏度与kr也有一定的相似性,均对系统低阶固有频率影响不大,而对部分高阶固有频率影响较为明显,其中29、33阶固有频率的灵敏度最大,分别为338、339。
对于行星轮,其支承刚度kp与krp、ksp之间存在交角并呈并联关系,使kp对系统固有频率的影响较为复杂,灵敏度也未呈现出规律性变化趋势。同时,在数值上kp远大于ks和内齿圈弯曲刚度,故中频段(6~28阶)的灵敏度较大,13,18阶灵敏度最大,为453、443。kp对系统低阶与高阶灵敏度均影响不大。
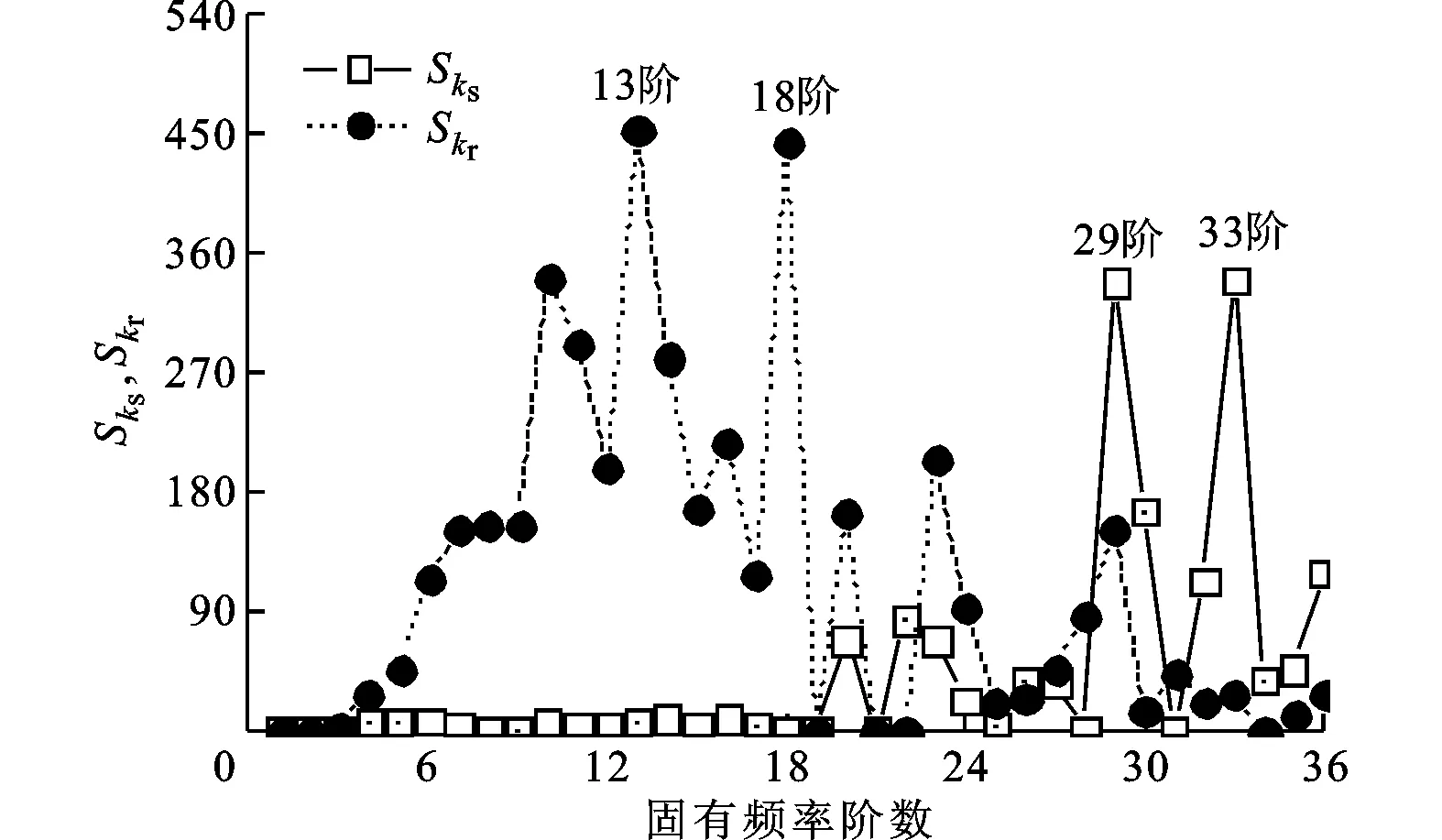
图6 krpi、kp对固有频率的灵敏度
4.2ksθ、kspi对系统扭转振动的影响
分别计算了不同ksθ、kspi下系统的固有频率,发现ksθ、kspi的变化仅影响系统的扭转振动模式(即系统18阶与36阶固有振型),对其他振动模式没有影响。随着ksθ、kspi的增大,系统扭转振动固有频率逐渐增大,二者的变化趋势基本一致,如图7所示,其中a、b分别为不同ksθ下系统扭转固有频率的变化,c、d为分别为不同kspi下系统扭转固有频率的变化。
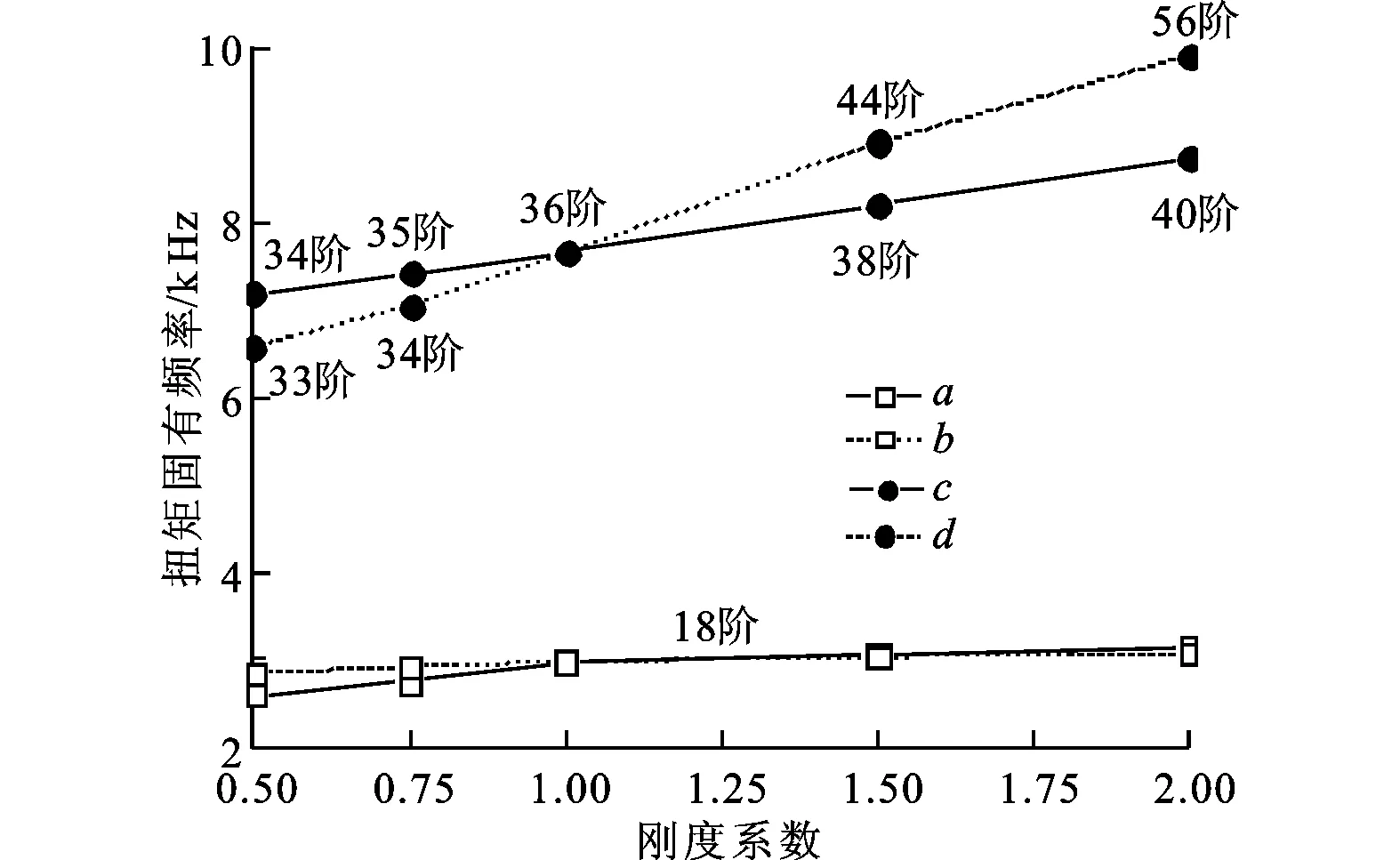
图7 ksθ、kspi对系统扭转固有频率的影响
可以看到,系统18阶固有频率随ksθ、kspi的变化趋势较为平缓,该振动模式所在阶数也未发生变化,始终为18阶;相对而言,系统36阶固有频率的变化幅度较大,其所在的结束也随之改变,但该振动模式始终为系统耦合振动模式的最高阶振型。在ksθ较小时,该振型为系统34阶,在kspi较小时,该振型为系统33阶,与之耦合的为齿圈8节径振型;当刚度为2ksθ时,该振型在系统40阶,齿圈振型为10节径;当刚度为2kspi时,该振型在系统56阶,齿圈振型为12节径,表明kspi对系统该振型的影响更为明显。
5 结 论
(1)在考虑了齿圈柔性后,系统低阶固有频率会明显减小,并出现齿轮子系统与齿圈结构节径或局部耦合振动模式,动态模式下会加速齿圈结构的弯曲疲劳失效。
(2)随着齿圈厚度的增加,耦合系统会在齿轮子系统的扭转振动频率位置出现固有频率,但与之耦合的齿圈振动模式则逐渐由高阶节径振动逐渐降低为低阶振动。
(3)当齿圈结构刚度远小于支承刚度时,系统1阶振型为齿圈节径振动模式;当齿圈结构刚度逐渐接近支承刚度时,系统1阶振型转变为齿圈刚体振动模式。
(4)分析各系统刚度对固有频率的灵敏度得出,在振动控制中可以依据振动主要成分的频率位置及通过系统刚度的主动设计,来有效抑制系统振动。
[1] 卜忠红, 刘更, 吴立言. 行星齿轮传动动力学研究进展 [J]. 振动与冲击, 2010, 29(9): 161-165. BU Zhonghong, LIU Geng, WU Liyan. Planetary gear transmission dynamics is reviewed [J]. Journal of Vibration and Shock, 2010, 29(9): 161-165.
[2] AMBARISHA V K, PARKER R G. Nonlinear dynamics of planetary gears using analytical and finite element models [J]. Journal of Sound and Vibration, 2007, 302: 577-595.
[3] SINGH A. Application of a system level model to study the planetary load sharing behavior [J]. Journal of Mechanical Design, 2005, 127(12): 469-476.
[4] BAJER A, DEMKOWICZ L. Dynamic contact/impact problems, energy conservation, and planetary gear trains [J]. Computer Methods in Applied Mechanics and Engineering, 2012, 191: 4159-4191.
[5] 张俊, 宋轶民, 王建军. 计入齿圈柔性的直齿行星传动动力学建模 [J]. 机械工程学报, 2009, 45(12): 29-36. ZHANG Jun, SONG Yimin, WANG Jianjun. Dynamic modeling for spur planetary gear transmission with flexible ring gear [J]. Journal of Mechanical Engineering, 2009, 45(12): 29-36.
[6] WU Xionghua, PARKER R G. Modal properties of planetary gears with an elastic continuum ring gear [J]. Journal of Applied Mechanics, 2008, 75(5): 1-12.
[7] KAHRAMAN A, LIGATA H, SINGH A. Influence of ring gear rim thickness on planetary gear set behavior [J]. Journal of Mechanical Design, 2010, 132: 1-8.
[8] AVINASH S. Application of a system level model to study the planetary load sharing behavior [J]. Journal of Mechanical Design, 2005, 127(1): 469-476.
[9] 周建星, 刘更, 马尚君. 内激励作用下齿轮箱动态响应与振动噪声分析 [J]. 振动与冲击, 2011, 30(6): 234-238. ZHOU Jianxing, LIU Geng, MA Shangjun. Vibration and noise analysis of the gear transmission system [J]. Journal of Vibration and Shock, 2011, 30(6): 234-238.
(编辑 赵炜 葛赵青)
Research on Inherent Characteristics and Sensitivities of Planetary Gear Transmission
TAO Qing1,SUN Wenlei1,ZHOU Jianxing1,2
(1. School of Mechanical Engineering, Xinjiang University, Urumqi 830047, China; 2. Center for Post-Doctoral Studies of Mechanical Engineering, Xinjiang University, Urumqi 830047, China)
A novel modelling method is proposed for rigid-flexible coupled planetary gear transmission systems that consist of rigid gear subsystems and elastic ring gear subsystems. The model for rigid gear subsystems is established by using the lumped parameter method and the model for elastic ring gear subsystems is established by using the FEA method. The natural frequency and vibration modes are deter-mined according to the compatible state of deformation between mesh force and ring gear deformation, and the distribution of the natural frequency for the coupled system is described. It is based on the vibration characteristics of the system that the vibration modes are classified into six kinds of modes. The effects of system rigidity to the sensitivities of natural frequency with different orders are calculated, and can be used as the bases for planetary transmission system vibration suppression. The influences of torsional stiffness of sun gear and the mesh stiffness between sun gear and planetary gears to the torsional vibration of the system are analyzed. The influences of the gear rim thickness to the system natural frequency distribution, to the subsystem coupling order time and to the vibration mode are discussed. It is found that the natural frequency appears in the position of the gear subsystem torsional vibration frequency, but the ring gear vibration mode is gradually reduced from the high-order section diameter and the first order vibration mode of the system is changed from a circle section diameter vibration mode into a gear ring rigid vibration mode as the thickness of the ring gear increase.
planetary gear transmission; dynamic model; rigid-flexible coupling; natural frequency; sensitivity
2014-08-10。 作者简介:陶庆(1978—),男,博士生;孙文磊(通信作者),男,教授,博士生导师。 基金项目:国家自然科学基金资助项目(51065026,51465056);新疆维吾尔自治区自然科学基金资助项目(2011211A002)。
10.7652/xjtuxb201503018
TH113
A
0253-987X(2015)03-0113-08
