基于单片机的船舶主动避碰系统设计
2015-03-14李美菊
李美菊
(德州职业技术学院,山东 德州 253034)
基于单片机的船舶主动避碰系统设计
李美菊
(德州职业技术学院,山东 德州 253034)
摘要:船舶作为一种重要的交通运输工具,具有载货量多,运输成本低,污染小等优点。但船舶航行条件比较复杂,其体积和重量比较大,导致惯性大、灵活性差、机动性不好,稍有操作不慎,就有可能发生碰撞事故。船舶不像其他陆上交通工具,具有较好的视野和灵活性,可及时发现故障和采取躲避措施。所以对于船舶而言,需要实现其主动避碰功能。本文基于单片机,设计一种船舶的主动避碰系统,采用超声波测距的方式测量与其他船舶或障碍物的距离,实现船舶的主动避碰。
关键词:主动避碰;单片机;超声波
0引言
船舶作为一种重要的交通运输工具,具有载货量多,运输成本低,安全经济,污染小等诸多优点。但是船舶体积和重量比较大,惯性较大,不像汽车等交通工具一样机动性比较好,可以及时发现故障,并采取有效的躲避措施。船舶航行时人员稍有操作不慎,就可能发生碰撞事故,而一旦发生碰撞事故,会给船舶和人员带来极大的危害。所以船舶航行过程中要尽量避免发生碰撞事故,实现船舶避碰的主动化、智能化和可预警化[3]。
设计应用于船舶的主动避碰系统具有很重要的意义,系统要能准确地测量船舶与航行线路上的各种障碍物的距离,当探测到前方存在危险障碍物时能及时发出报警信号,警告船员采取应急应对措施,躲避障碍物,实现船舶的主动避碰功能,为船舶的顺利航行保驾护航[1]。
1船舶主动避碰技术发展
国内外从20世纪就开始了对避碰领域的研究,积累了丰硕的成果和经验。目前国内外使用最普遍的避碰系统主要有自动雷达标绘仪(ARPA)和全球船载自动识别系统(AIS)2种[1-2]。
ARPA作为现代大型船舶上用于防撞避碰的主要仪器设备,可以较好地实现避碰功能,但也有一些自身的缺点:工作情况容易受到天气和海况等因素的影响,尤其在大风、暴风雨雪等恶劣的状况下难以保证检测结果的可信性;另外,ARPA不能标示目标船只,会产生精度低和丢失率高等现象。
AIS是一种新型自动识别系统,可以将船舶的航行信息向外播发,周围同样装载了AIS设备的船舶可以接收到信息,并将信息实时显在屏幕上。AIS的快速发展,使得其在船舶避碰领域得到了广泛的应用。但AIS也存在以下问题:AIS 的液晶显示屏显示有限,只能显示若干艘船舶或障碍物;AIS性价比不高,在中小型船难以普及;AIS 不能取代雷达,与雷达系统在实际应用中必须相互补充[3]。
大型船舶一般都有经济能力安装较为完备的避碰监测系统,可以较好地实现船舶的避碰。但中小型船舶尤其是渔船往往由于经济能力不足,船员安全意识相对淡薄,很少装有避碰监测系统,导致碰撞事故频发。尽管现阶段 AIS 等设备成本逐渐减少,性价比也逐渐提升,但还是很难在这些船舶中得到应用。因此开发一种适用于中小型船舶精度高、性价比高的主动避碰系统具有非常重要的意义。
2船舶主动避碰系统设计
本文基于安全性与性价比等各方面因素综合考虑,设计一种成本低、体积小、不影响船舶安全性、安装于船舶上的主动避碰系统。该系统能够检测到前方的障碍物,不受天气情况和航行状况的限制,并计算出船舶与障碍物的实时距离,快速精准得出各类参数,若检测到的数据低于设定的门限阈值,则系统及时发出声光警报信号,让船舶工作人员及时发现危险采取应对措施,顺利避开前方的障碍物,从而避免碰撞事故的发生。
船舶主动避碰系统的主要功能包括障碍物信息的自动采集、障碍物信息的处理、对危险的判断、产生报警信号、产生避碰决策方案和实施避碰决策方案等[4-5],如图1所示。

图1 船舶主动避碰基本过程Fig.1 The basic process of ship collision avoidance
基于以上基本功能,本系统选用低功耗、高性能AT89C51型号的单片机作为主控芯片。该芯片拥有基于复杂指令集(CISC)的单片机内核,端口为准双向并行口结构,具有很强大的扩展性能。以该芯片为基础扩展的外围硬件可以为系统提供人机交互界面,实现对测得数据的显示,对工作模式的反映。系统框图如图2所示。

图2 船舶主动避碰系统框图Fig.2 The block diagram of ship collision avoidance system
避碰系统主要由以下5个部分组成:
1)核心控制部分。由单片机AT89C51作为控制芯片,通过距离传感器感知到的距离信息传到单片机,单片机对这些信息进行判断、筛选、处理、预测等步骤,再形成相应的指令传输给执行机构,在程序控制和外围简单组合电路作用下运行,为主控制系统实现显示、报警、执行等功能;
2)距离信息测量部分。主要由距离探测传感器组成,主要功能是收集船舶周围障碍物的距离和位置信息,将信息传送给单片机;
3)显示部分。主要由LED显示屏组成,它能够将单片机处理后的信息反映在屏幕上,如障碍物距离、系统工作状态等,让用户能够直观的读取、记录测距仪感知的信息,用户在转换工作模式的时候也需要从LED显示器上获得重要的信息。
4)按键控制部分。由按键控制调节,用来控制系统的工作状态和工作模式,以及设定报警门限和解除警报等;
5)声光报警电路。由不同色的发光二极管和警报蜂鸣器共同组成声光双重报警电路,当检测信号低于设定的门限值时,通过声光信号来显示报警,让船员可以在第一时间了解到危险。
3超声波测距电路设计
船舶主动避碰系统中最核心的是测距部分,对船舶周围障碍物的距离进行准确无误的测量是系统实现主动避碰的关键所在。
根据船舶水上航行实际情况,非接触式的测量方式对于时刻处于运动状态的船舶具有很好的捕捉和检测能力,目前应用于避碰领域的非接触测距方法有超声波测量方法、激光测量方法、红外线测量方法、雷达测量方法等。这几种常见测距方式都是基于声波或电磁波探测的方式来判断与障碍物之间的相对距离。
考虑到激光和雷达测距仪器价格偏贵、性价比不高,红外测量容易受到测量距离限制等因素,本系统采用超声波测量方式,具有以下优点:
1)超声波在传播时,方向性强,能量易于集中;
2)超声波能传播较强的能量,而且能量不容易被干扰和衰减,可以传播很远的距离;
3)超声波收发电路结构简单,性价比高,易于小型化与集成化。
超声波进行船舶障碍物距离测量工作原理是:单片机发出的脉冲信号经过超声波发射电路后向外界发送,声波遇到障碍物后就会原路返回,返回的超声波会被超声波接受电路测到。通过传播时间、声波速度与传输距离的关系,可以很方便地计算船舶与障碍物之间的距离,这就是时间差测距法。由于超声波传播速度极快,其传输时间与船舶应对时间相比可以忽略不计,几乎可以做到瞬时测距,因此采用超声波几乎可以实时测量船舶周围障碍物的位置和距离信息。
采用超声波测距方法的船舶主动避碰系统如图3所示。其中电路的控制核心为单片机AT89C51。
整体结构主要分为以下3个部分:
1)核心控制部分。主要是单片机控制芯片AT89C51及其周围电路;
2)信号采集与处理部分。主要包括超声波发射电路部分和超声波接收电路部分,其中超声波发射部分包括振荡电路、放大电超声波发射电路和超声波传感器。超声波接收电路包括超声波传感器、超声波接收电路、放大电路和比较电路;
3)显示电路部分。主要包括LED液晶显示电路、声光报警电路、键盘按钮电路等附属控制电路。

图3 采用超声波测距的船舶主动避碰系统功能框图Fig.3 The block diagram of ship collision avoidance system using ultrasonic distance measurement
采用超声波测距方式主动避碰系统的工作原理是:单片机发出固定频率的脉冲信号,因为单片机发出的信号比较微弱,为防止其在传播过程中受到干扰和衰减,需要经过放大器进行放大,然后再通过超声波发射器向周围发出。前方如果没有障碍物阻挡超声波的传播,超声波信号发出后不会再返回。当超声波信号遇到障碍物时就会原路返回,返回的超声波被接收器接收,接收器将接收到的超声波信号送到放大器,放大器对超声波信号进行放大,然后进行比较处理,最后把数据送到单片机,再由单片机进行分析和计算,将距离和位置信息送至LED进行显示。

图4 超声波发射电路原理图Fig.4 The circuit diagram of ultrasonic transmitting circuit
图4是超声波发射电路图。超声波发射电路主要由超声波发射换能器和放大器两部分构成。超声波换能器T的功能是将接收到的电信号转换成超声波信号,然后将超声波信号发射出去。单片机输出的固定频率的方波信号经过反相器组成的放大电路进行放大。
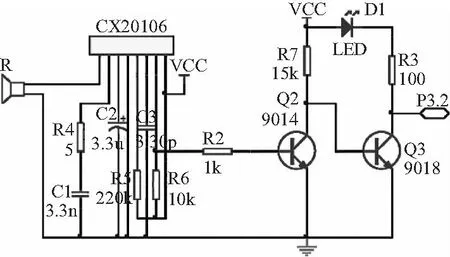
图5 超声波接收电路原理图Fig.5 The circuit diagram of ultrasonic receiving circuit
图5是超声波接收电路图。超声波接收电路由检波接受电路和放大电路两部分组成。其中超声波检波接受电路采用集成芯片CX20106将接受到的电磁波信号转换为电信号,并在接收到与单片机发出信号频率相同的信号后,向单片机发出中断请求。三极管Q2和Q3组成的两级放大电路对返回来被超声波传感器接收到的非常微弱的反射波信号进行放大。
基本工作原理是,当超声波传感器接收到遇到障碍物返回的超声波信号后,将超声波信号转化为电路可以识别和处理的电信号,然后送入放大器,放大器对信号进行放大,放大后的信号送入锁相环,锁相环判断信号频率,如果发现频率与单片机发出的信号频率相匹配,则发出中断请求信号送至单片机,单片机接受到请求,立刻停止定时,然后对收到的信号进行分析和计算,得到距离和位置等结果。
4其他电路设计
除了核心的超声波测距部分,还有一些扩展的外围系统,主要由LED显示部分、声光报警电路、键盘电路等部分组成。
LED显示部分:主要由LED显示屏组成,可以显示汉字与数值,主要功能是将单片机处理后的信息反映在屏幕上,如障碍物距离、系统工作状态等等,让用户能够直观的读取、记录测距仪感知的信息,了解船舶当前的航线状态。用户在转换工作模式的时候也需要从LED显示器上获得重要的信息。
声光报警电路部分:采用发光二极管和蜂鸣器搭配的声光双重警报,当系统测量到的障碍物距离超过门限设定值时,报警电路中的二极管发出不同颜色的光,蜂鸣器发出响声,提供光源警报和声音警报,警示船员。
键盘电路部分:采用普通的按键开关,主要功能是控制系统的开关与工作模式,以及声光警报部分的模式选择以及警报解除。
基本电路可以参考所选的LED显示屏、发光二极管和按键的型号对应的说明书进行电路设计。其电路有一定的通用性。
5结语
本文介绍了几种当前使用最普遍的避碰方式,在此基础上设计了一种适用于中小型船舶的成本低、体积小、不影响船舶安全性的船舶主动避碰系统。该系统采用单片机AT89C51作为整体电路的控制核心,采用超声波测距方法实现障碍物的测量,同时系统还配备了LED显示和声光电报警灯等功能。重点对系统中的核心部分超声波测距部分进行了设计与分析,给出了关键电路的设计,下一步需要搭建实际的实验平台进行验证。
参考文献:
[1]徐务农,边少锋,陈永冰.舰船避碰系统研究综述[J].舰船科学技术,2008,30(3):42-46.
XU Wu-nong,BIAN Shao-feng,CHEN Yong-bing.Survey of research on ships collision avoidance system[J].Ship Science and Technology,2008,30(3):42-46.
[2]王晓飞,李柏年,崔渊,等.基于DSP技术的毫米波船舶避碰雷达的设计[J].微计算机信息,2010(20):138-139.
[3]刘云来.单片机船舶内河避碰信号设备控制器[J].工控天地,1995(6).
[4]刘科,陈红卫,陈建华.船舶避碰辅助决策系统的设计与实现[J].舰船科学技术,2008,30(3):107-110.
LIU Ke,CHEN Hong-wei,CHEN Jian-hua.A decision support system design and implementation for ship collision avoidance [J].Ship Science and Technology,2008,30(3):107-110.
[5]李丽娜.船舶自动避碰研究中安全会遇距离等要素的确定[J].大连海事大学学报,2002(3):23-26.
Design of ship collision avoidance system based on micro controller unit
LI Mei-ju
(Dezhou Vocational and Technical Collede,Dezhou 253034,China)
Abstract:The ship is a kind of important traffic tool,have lots of advantages, compared with other traffic tools, ships have large carrying capacity, low transport cost, long life time low pollution etc. But the navigation conditions of ships are complex, the size and weight of the ship is relatively large, causing the large inertia, poor flexibility and bad mobility, any careless operation may cause a collision accident. Unlike other vehicles which have good vision and flexibility, fault can be found timely, and then take evasive action. So the realization of the active and automatic collision avoidance of the ship is needed. This paper designs a kind of active collision avoidance system based on Micro Controller Unit for the ship, use ultrasonic ranging application to measure the distance with other ships or obstacles, realizing the active collision avoidance of the ship.
Key words:active avoidance;MCU;ultrasonic
作者简介:李美菊( 1980 - ) ,女,本科,讲师,研究方向为电气自动化技术。
收稿日期:2014-11-06; 修回日期: 2014-11-20
文章编号:1672-7649(2015)02-0160-04
doi:10.3404/j.issn.1672-7649.2015.02.035
中图分类号:U675
文献标识码:A
