基于dSPACE的船用异步电机矢量控制研究
2015-03-14郭宝宁
郭宝宁
(江苏海事职业技术学院,江苏 南京 211170)
基于dSPACE的船用异步电机矢量控制研究
郭宝宁
(江苏海事职业技术学院,江苏 南京 211170)
摘要:为了能够反复便捷地对船用异步电机矢量控制技术进行研究,需要对整个系统进行仿真。而传统的离线仿真技术已不能满足现在系统多样的需求,而本文研究的dSPACE实时仿真技术可以很好的解决这一问题。本文首先研究船用异步电机矢量控制技术,然后针对该控制方案进行基于Simulink的离线仿真,接着搭建了基于dSPACE半实物仿真平台的船用异步电机矢量控制系统,并借助于该系统展开船用异步电机矢量控制实验,验证基于dSPACE进行船用异步电机矢量控制的可行性、实用性与便捷性。
关键词:船用异步电机;dSPACE;矢量控制
0引言
船舶电力推进时至今日已有100多年的应用历史,其传动方式与电气传动有密不可分的关系。而矢量控制技术在电气传动领域具有优越的调速性能,为了能够反复便捷地对船用异步电机矢量控制技术进行研究,再结合实际环境、实验条件、研制周期等因素的限制,使得实施一种行之有效的试验方法更加迫在眉睫。
当前应用的大多数仿真算法都是离线算法,不能用于真实准确的模拟实际系统的各种参数,也不方便参数的整定和调试,所以提出了实时仿真算法[1]。实时仿真就是同步仿真,采用与真实系统一个时间比例尺,将仿真软件与真实的系统场景组成起来。dSPACE是基于Simulink的一种软硬件工作平台,主要用于对系统进行半实物仿真,具有快速、灵活、实时性强等一系列优点。同时具有实时软硬件环境做支持,并且可以自动产生和下载代码,因而可以达到实时系统的要求[2]。
在船舶电机调速控制时,通过事先搭建船用异步电机仿真平台,对船舶的异步电机进行矢量控制实时仿真,对控制系统的设计、控制算法、参数配置等进行研究与测试,可极大地缩短产品的研发时间,降低开发经费与技术风险。
1dSPACE系统介绍
本文研究基于dSPACE单板系统DS1104。DS1104是目前德国dSPACE公司新开发的一种用于快速控制原型的单板硬件系统,可以执行浮点运算。控制板还集成了TI的C2000系列DSP,具有强大的数据处理功能,同时可以满足用户广泛的I/O需求。该系列的DSP可以产生PWM及SVPWM脉冲,特别适合应用于在功率开关管的驱动方面[3]。图1所示为DS1104的控制板结构框图。
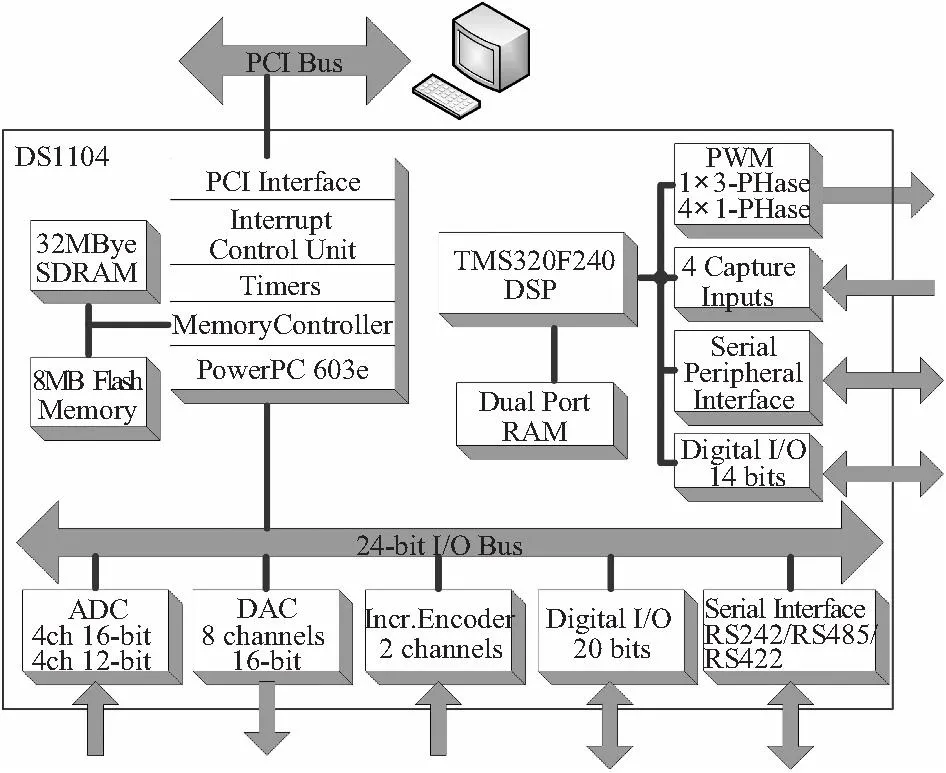
图1 DS1104控制板结构框图Fig.1 Block diagram of DS1104 control board
借助于dSPACE进行项目开发的主要工作过程包括以下5个步骤:
1)建立基于Matlab/Simulink的控制系统数学模型;
2)基于Simulink对该模型进行离线仿真;
3)将1)中的离线仿真模型改造成实时仿真模型:① 保留要下载到dSPACE中的模块;② 将原来的逻辑连接关系用硬件接口关系替代;③ 配置I/O模块的参数;④ 设定软硬件中断的优先顺序。
4)借助于Matlab中的RTW及dSPACE中的RTI,实现代码的自动生成、编译及下载;
5)利用dSPACE中的综合实验及测试软件工具ControlDesk实施基于半实物仿真平台的实时仿真,实时监控控制信号的参数及曲线和在线调参。
2船用异步电机矢量控制策略
船用异步电机矢量控制,是指在静止坐标系下将船用异步电机的三相交流量,通过坐标变换到同步旋转坐标系下的直流量[4]。
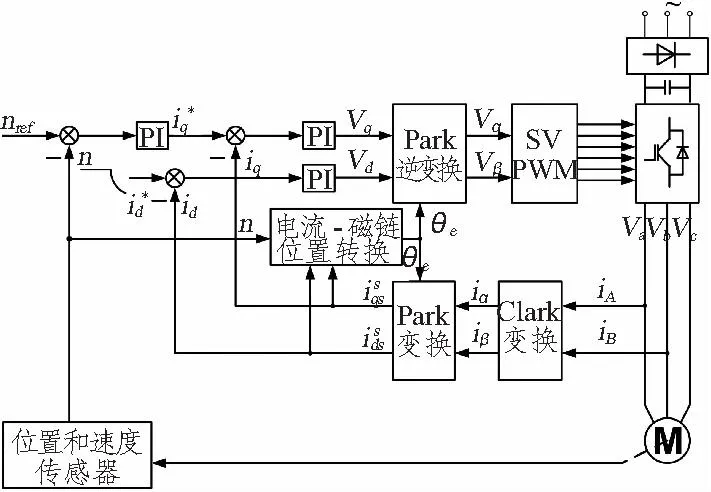
图2 船用异步电机矢量控制结构框图Fig.2 Block diagram of ship induction motor vector control
图2中,控制系统采用双环控制方式,包括转速外环和电流内环。其中对于转速环,转速给定值nref与位置速度传感器采样到的实际转速n作差,将差值送到转速PI控制器,该控制器的输出为定子电流转矩分量的iq*。定子电流励磁分量指令值id*根据特性方程id*=f(n)输出。id与实际转速的关系是,在实际转速不超过额定转速的范围内控制id*保持恒定不变。在实际转速大于额定转速后,使id*按与实际转速n成反比例关系逐渐降低。

3离线仿真
本节主要建立基于Simulink的仿真模型,进行离线仿真。应用dSPACE进行实际实验前,一般都要进行离线仿真,而且不论是创建仿真模型,还是配置仿真参数,都需要尽可能地与实时仿真模型相似。这样做的好处在于:首先,可以通过离线仿真的方式在一定程度上来检验搭建的控制模型的正确性;其次,通过离线仿真中确定的一些参数,尤其是一些调节器参数,可以为以后dSPACE实时仿真时的参数配置和调试提供指导。
基于RFOC的异步电机传动模块(Field-Oriented Control Induction Motor Drive)是仿真模型外层的关键模块,如图3所示。
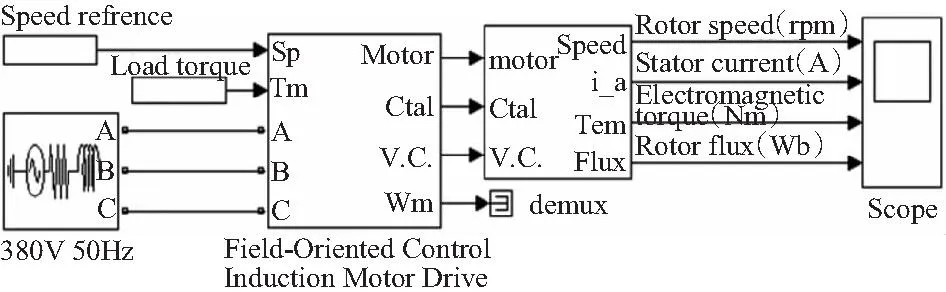
图3 仿真模型原理图Fig.3 Schematic of simulation model
转子磁场定向控制系统的原理图如图4所示。系统主要分为7个部分,其中控制部分为磁场定向控制器和转速调节器。主要工作原理是,船用三相交流电经过三相不控整流桥进行整流,然后将整流输出的直流电压送到直流滤波环节进行滤波,经过滤波环节的直流电再通过三相逆变器逆变,将直流电源转化为交流电压,最后送给异步电机。

图4 转子磁场定向控制原理图Fig.4 RFOC schematic
在负载条件下进行离线仿真,仿真条件按表1所述进行给定,在此条件下进行离线仿真,仿真波形如图5所示。

表1 离线仿真给定条件
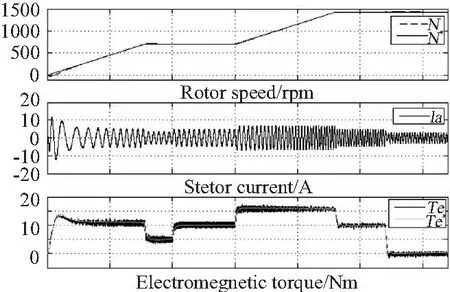
图5 负载条件下的离线仿真波形Fig.5 Off-line simulation waveforms on load conditions

4基于dSPACE的矢量控制实时仿真平台
基于上一节的离线仿真模型,本节进行基于dSPACE实时仿真平台的矢量控制实验。首先的工作是要先建立好实时仿真模型,在此基础上然后搭建基于dSPACE的船用异步电机矢量控制实时仿真平台。

图6 船舶异步电机实时仿真平台结构图Fig.6 Diagram of real-time simulation platform for ships′ induction motor
本文紧紧围绕dSPACE实时仿真系统这个控制系统的核心来搭建船用异步电机调速系统实验平台。图6为基于dSPACE实时仿真平台的船用异步电机矢量控制系统结构框图。该试验平台主要组成部分,包括船用异步电机、PC控制机、dSPACE软件仿真系统、dSPACE控制面板DS1104面板、信号采样模块和整流逆变功率模块等[5]。
系统中的dSPACE软件系统的主要功能是搭建基于dSPACE的矢量控制Matlab实时仿真模型。该模型中RTI模块的主要功能是生成脉冲驱动信号,然后将脉冲驱动信号经过dSPACE硬件中集成的DSP控制芯片(TMS320 F240)发出,用来驱动IPM功率模块中开关管的导通与关断,便将由三相不控整流器整流后的直流电压变成交流电压输入给异步电机;与此同时模数转换器及增量编码器实时采样得到的中间直流电压、两相定子交流电流与电机转速,并通过调理电路的处理后用以产生控制脉冲,以形成闭环控制。
图7所示为在dSPACE平台上搭建的矢量控制实时仿真模型。相比图4,只有速度控制模块与转子磁场定向控制模块这2个子模块留在该图中。
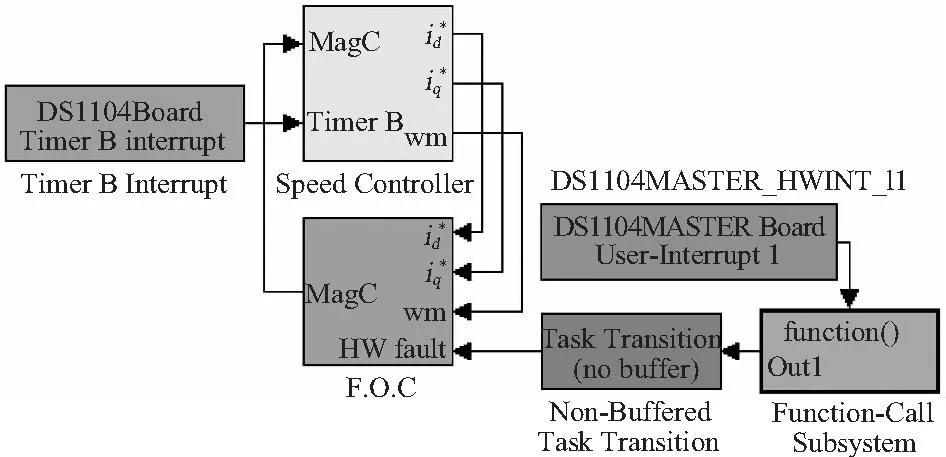
图7 基于dSPACE矢量控制的实时仿真模型结构框图Fig.7 Block diagram of real-time simulation model structure for vector control based on dSPACE
5基于dSPACE的矢量控制实验结果
本节主要是在上述仿真的基础上进行实验验证。借助于dSPACE方便灵活的人机交互软件环境,通过在生成的*.sdf 格式的文件中添加不同的虚拟仪表等工具,设置完成调试界面。在各种模拟仪表工具的监控下,可以灵活方便地调整给定变量,并在线观测各种曲线波形,同时实现了参数的在线配置与数据实时记录目的。
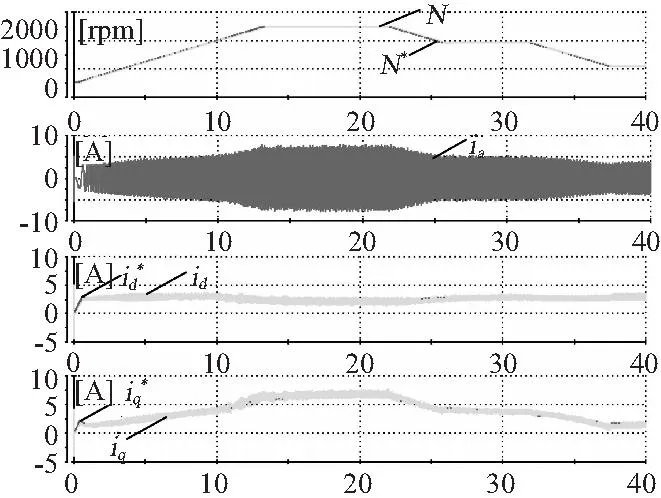
图8 船用异步电机矢量控制实时仿真实验波形Fig.8 Waveforms of real-time simulation for vector control of ships′ induction motor
试验中转速的给定情况:从0~22.5 s 时间范围内,转速N*为2 100 r/min;从22.5~32.5 s 时间范围,转速N*为1 450 r/min;大于32.5 s后,转速N*为700 r/min。在此给定条件下进行试验,电机转速给定与实际N*/N、a相电流ia、励磁电流指令与实际id*/id、转矩电流指令与反馈iq*/iq从上到下分别如图8所示。负载工况下,电机转速实际值N能够快速的紧跟指令值N*、励磁电流id及转矩电流iq同样如此。当电机超过额定转速运转时,异步电机处于弱磁工作状态,励磁电流会变小。而电机重新低于额定转速运行时,励磁电流重新回到正常值,且基本维持恒定。前述这些波形的变化可以表明,励磁电流一样的情况下,电机的电磁转矩的大小仅靠转矩电流决定和控制。该结论与第2节中的理论论述和第3节的离线仿真结果相一致。另一方面也证实了本文利用dSPACE实时仿真平台进行船用异步电机矢量控制的研究,是有意义的,具有一定的可行性和实用性。
6结语
本文对船用异步电机的矢量控制技术进行了系统的研究,在Simulink下搭建了离线仿真模型,对其进行离线仿真。在离线仿真的基础上,又搭建了基于dSPACE的船用异步电机矢量控制的实时仿真平台,进行了实时在线仿真实验,验证了基于dSPACE的船用异步电机矢量控制的可行性与实用性。
参考文献:
[1]刘永欢,刁利军,刘志刚.基于dSPACE-RCP的SVPWM调制技术实现[J].电子设计工程,2011,19(20):184-187.
LIU Yong-huan,DIAO Li-jun,LIU Zhi-gang.Realization of the SVPWM technique based on dSPACE-RCP[J].Electronic Design Engineering,2011,19(20):184-187.
[2]姚静.多功能组合阀及其控缸特性的理论与实验研究[D].秦皇岛:燕山大学,2004.
[3]金晓华.基于dSPACE半实物仿真的电机测试平台研究[D].南京:东南大学,2006.
[4]郝雯娟.基于dSPACE的交流电机矢量控制系统无速度传感器研究[D].南京:南京航空航天大学,2008.
[5]呼明亮,邱建琪,史涔溦.基于dSPACE的无刷直流电机控制系统[J].微电机,2011,44(4):60-63,94.
HU Ming-liang,QIU Jian-qi,SHI Cen-wei.Control system for brushless DC motor based on dSPACE[J].Micromotors,2011,44(4):60-63,94.
[6]闫智辉,李志远.异步电机直接转矩控制技术在随动系统中的应用[J].舰船科学技术,2007,29(S1):50-52.
YAN Zhi-hui,LI Zhi-yuan.Application of technique induction electromotor controlled by direct torque in a following-up control system[J].Ship Science and Technology,2007,29(S1):50-52.
Research of vector control for induction motor of the ship based on dSPACE
GUO Bao-ning
(Jiangsu Maritime Institute,Nanjing 211170,China)
Abstract:In order to research on the vector control technique for induction motor of the ships repeatedly and conveniently, we need to simulate the whole system. The off-line simulation technology is already unable to satisfy the different requirements of the systems, this paper proposes a kind of real-time simulation platform based on dSPACE can solve this issue. This paper researches on the vector control scheme for induction motor of the ships, and then do off-line simulation on Simulink for this control scheme. Then based on dSPACE semi-physical simulation platform, this paper builds simulation model of vector control, and implements the vector control experiment for induction motor of ship. Finally, the effectiveness, practicability and convenience of vector control for induction motor of ship based on dSPACE is verified.
Key words:induction motor of the ships; dSPACE; vector control
作者简介:郭宝宁(1964-),女,副教授,研究方向为电气自动化技术。
基金项目:中国交通教育研究会交教研资助项目(1402-158);2014-2016年度教育科学研究课题资助项目
收稿日期:2014-03-17; 修回日期: 2014-09-12
文章编号:1672-7649(2015)02-0144-04
doi:10.3404/j.issn.1672-7649.2015.02.031
中图分类号:TM301
文献标识码:A
