Research on Orbit Formation and Stability Control Based on High Orbit
2015-02-20LIUMengZHANGXiaoyuYANYousheng
LIU Meng,ZHANG Xiaoyu,YAN Yousheng
(Shenyang Ligong University,Shenyang 100159,China)
Research on Orbit Formation and Stability Control Based on High Orbit
LIU Meng,ZHANG Xiaoyu,YAN Yousheng
(Shenyang Ligong University,Shenyang 100159,China)
High rail tetrahedron refers to the minimum speed of space target orbit spacecraft tracking which is needed.Lagrange minimum principle is applied to this case and track space platform is taken as the objective function and adjusts.The spacecraft rail six elements of space target get into the new orbit.The spacecraft can reach the orbit around the track and fly around space target on orbit,The orbit tracking and formation of the simulation provide the further research with certain information.
fly around;lagrange minimum principle;formation of the simulation
With the current rapid development of space technology,more and more of the formation in space satellite will play an important role for commercial and national defense providing the powerful service.In order to finish the task,the spacecrafts are used to be in formation flight or element of state in space.Because of the particularities,theirs transform and maintaining the track are different from general big satellite.At present many experts research on satellite formation in formation and mobile commutation means and so on,such as literature[1],but these studies are focused on formation in most of the geometric formation and less attention on adjusting itself to the ground after the formation of the satellite observe the influence of task,the more attention should be paid to this problem.This paper is focused on the observations of the high rail.1
1 FORMATION FLYING ORBIT
The orbital altitude is 2800~36000 km,whose coordinate system is shown in the figure:xyzis coordinates of the horizon,ris the distance between the spacecraft and the center of the earth.ris 2800~42000 km in the high orbital spacecraft.
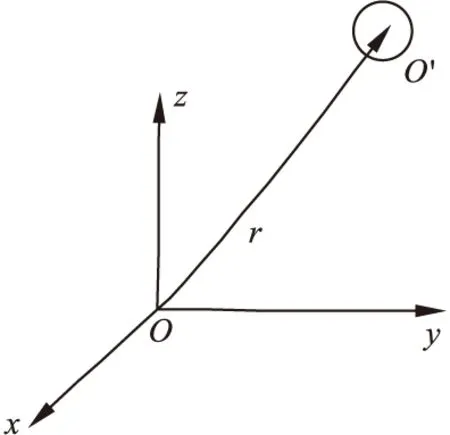
Figure 1 Elliptical orbit plane flying around with 3D
When the spacecraft flied around the target,(it can natural form) the spacecraft to target for the center relative motion reference coordinate systemx-yplane within natural form can fly around the oval track.The angular velocity of the spacecraft is equal to the target except the direction.The figure 2 show that the orbit plane within around the oval trackx-yplane fly in the projection is an ellipse,and long half shaft for short half shaft,the two times inx-zplane and the projection for a planey-zstraight line,meet form orbit plane within the fly requirements.Elliptical in addition,elliptic on orbit tracks in space target orbit plane within run with the space target orbit direction angular velocity equal,contrary,because on orbit plane and space target orbit plane superposition,so on orbit cycle for the space that target orbit operation cycle[2].

Figure 2 Elliptical orbit plane flying around with 3D maps and projection
2 FORMATION FLYING ORBIT DESIGN HANGING AROUND
According to the swing hanging rail demand,spacecraftBis required to do swing formation at the same plane with the target spacecraftAall the time.SpacecraftCdo the synchronized flying,hanging the spacecraft as the satelliteB,regarding the spacecraftAas the target,spacecraftCcomposes a suspension of the “pendulum” at the same time,shown in Figure 3.The two spacecraft’ operating period and the moment of operating angular velocity are equal,the orbit of spacecraftCis called the target spacecraftAsuspension swing track.
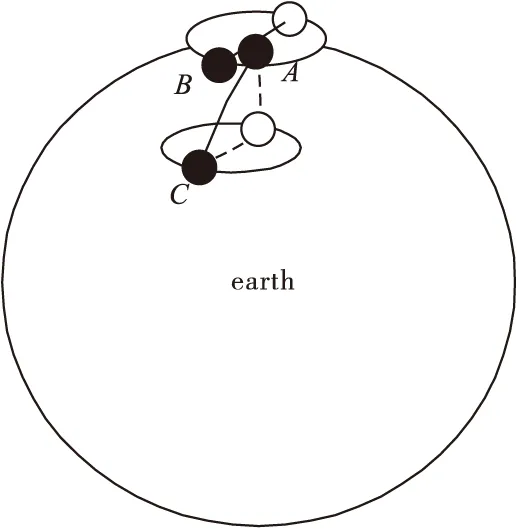
Figure 3 Formation flying orbit figure
Although the spacecraftCis still running track round (or oval),but it is clear that the track does not belong to Keplerian orbit,because the spacecraft does not comply with laws governing the operation of Kepler′s third law.For orbital characteristics of the suspension analysis,it is not difficult to find that it is a special kind of pan-Keplerian orbit[3].
According to the definition of suspension track[4],The moment of operating angular velocity of vehicleBand vehicleCare equal,the spacecraft′s orbit six elements ofCare (a2,e2,i2,w2,Ω2,θ2),and the long axis of the spacecraftCis thata2=a1-f.
As for the circular orbit spacecraftCbeinge2=0,the spacecraftCandBin the same orbit spacecraft orbital into the same inclination of the surface,thati2=i1.
According to hang the track features we can see that the perigee,ascending node right ascension,the real perigee angle of spacecraftCand perigee,ascending node right ascension,really perigee angle of the spacecraftBare equal,the relationship of spacecraftC‘s track six elements of (a2,e2,i2,w2,Ω2,θ2) and space trackAthe target spacecraft’s track six elements are that
(1)
3 BASED ON THE C-W EQUATION OF THE CIRCULAR SUSPENDED RAIL DESIGN
The orbit of spacecraftAis designed as the reference orbit,showed asRR,when the reference track is a circular orbit,the spacecraftBoperation suspended rail is also circular orbit.If the two aircraft of the distance between theDis much smaller than the reference orbit radiusRR,usingC-Wequation to describe the vehicleBin the vehicleAtrack coordinate system relative movement.Formula of,Ωis aircraftArun angular velocity,respectively,acx,acyandaczrole in the vehicleBcontrol acceleration vector in aircraftAtrack coordinate system of the three subscales.
(2)
According to the definition of a suspended track,it can be substituted forBin the round hanging in orbit required control acceleration.
(3)
It shows that,when the aircraftAis in a circular orbit,and the suspension distance is less than the reference orbit radiusRR,theBof aircraft in a round hanging orbit required control acceleration and hanging proportional distances,and reference orbit radiusRRpower is inversely proportional to three,control the direction of the acceleration as the vehicle isAto vehicleB.
In formula (1):v1is the initial velocity of the orbit points;θ1is the inclination of the initial velocity;ξis the included angle of orbit between initial orbit and track orbit,c0,c1,c2are all the function ofr1,r2,qis the parameter in the function of track orbit.The minimum energy tracking is a orbit which meetsΔv=Δvmin,in the orbit group of which connects between the spacecraft and space target,and establish the variable relationship betweenΔvandqfirstly,the formula is
Thensotooisanecessaryconditionforthederivativeqwaszero.Finally,findtheLagrangeprincipleofminimumrateofincrement.
Withtheforceofnatural,spacecraftBwillmovefasterthanspacecraftA,soitcannotalwaysbebelowspacecraftA.InordertocontrolthespacecraftBunderthespacecraftAsteadily,wemustprovidecontinuousaccelerationforspacecraftB,theaccelerationofwhichis:
SpacecrafttrackinginitiationtracksixelementsandflyaroundofspacetargetorbitsixelementsareshowninTable2.SpacecraftthroughrailminimumimpulseaftertransfervelocityimpulseinTable3.Bycalculatingspacecraft7805.2s,generateSTKsimulationvisualshowninFigure4.

Table 1 SPACECRAFT AND SPACE TARGET ORBIT SIX ELEMENTS
In order to control the spacecraftBunder the spacecraftAsteadily,the acceleration of spacecraftB:
acx=0,acy=0,acz=-2.3355×10-5
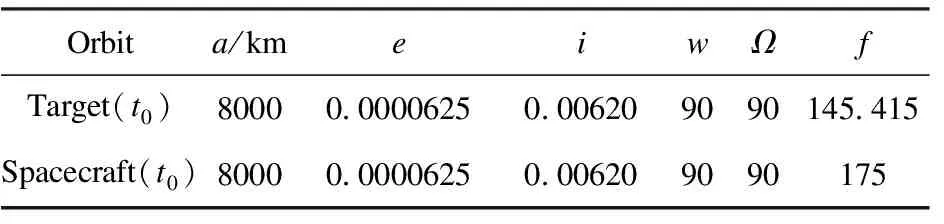
Table 2 THE SPACECRAFT TRANSFER SPEED INCREMENT
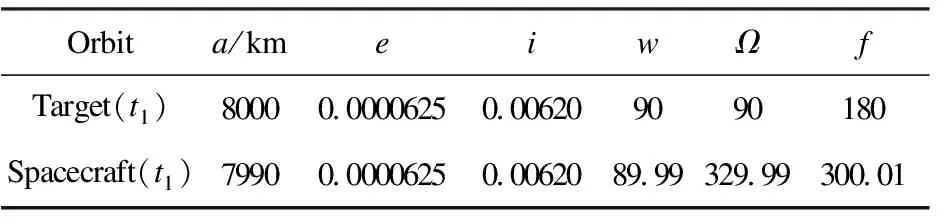
Table 3 THE SPACECRAFT TRANSFER SPEED INCREMENT
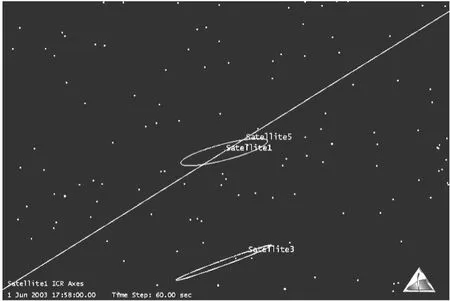
Figure 4 STK Simulation visual diagram
4 CONCLUSION
As diversification of space mission needed,the transitions of spacecrafts have many ways.This paper established the second body movement of the spacecraft in orbit dynamics calculation model.Based on the Lagrange,can get two minimum values of speed.Based on the minimum impulse may be further realize spacecraft big range of space target orbit maneuvers on orbit transfer.
REFERENCES:
[1]Wilde D,Kerstein L,Frumkon Y,et al.The Inspector Family[C].49th International Astronautical Congress,Paper No.IAF-98-T.3.0.3,Melbourne,Astralia,September 28-October 2,1998:15-20.
[2]Eyer J K,Damarenl C J.A Formation Flying Control Algorith for the CANX-4&5 Low Earth Orbit Nanosatellite[C].58th International Astronautical Congress,Paper No.IAC-07-B4.6.04,2007:35-38.
[3]Xi Xiaoning.Fundamentals of near-Earth spacecraft orbit[M].Changsha:National University of Defense Technology press,2003:56-66.
[4]Zhang Caijuan.STK and its application in satellite system simulation[J].Radio communication technology,2007,33(4):45-48.
[5]Chen Xiaoqian,Yuan Jianping.The spacecraft on-orbit servicing technology [M].Beijing:China Astronautics Publishing House,2009:45-49.
(责任编辑:马金发)
Foundation item: Liaoning Province Department of Education Science and Technology Research Project (L2012065,L2013085)
1003-1251(2014)03-0086-04
TP393 Document code: A
Received date: 2014-04-02
Biography: LIU Meng(1977—),male,Senior experimentalist,Master,Research direction:distributed simulation technology.
