三容水箱液位的预测函数控制算法研究
2015-02-20纪振平张晓杰
纪振平,张 扬,张晓杰
(沈阳理工大学 信息科学与工程学院,辽宁 沈阳 110159)
三容水箱液位的预测函数控制算法研究
纪振平,张 扬,张晓杰
(沈阳理工大学 信息科学与工程学院,辽宁 沈阳 110159)
三容水箱液位控制是典型的非线性、大滞后的对象,针对常规的PID控制响应时间长、超调大等问题,采用基于预测函数控制(PFC)的串级控制系统对三容水箱液位进行控制。根据实际测得三容水箱液位数据建立预测模型,并以预测函数控制作为主控制器建立三容水箱液位控制系统。仿真结果表明,基于预测函数控制的系统动态品质优于常规的PID控制算法,具有较强的鲁棒性和抗干扰能力。
三容水箱;液位;预测函数控制; PID控制
液位是过程控制中重要的控制参数之一,三容水箱是典型的非线性、大时延对象,工业上较多被控对象的整体或局部都可以抽象成三容水箱的数学模型,具有很强的代表性[1]。当液位给定值发生变化时三容水箱控制系统表现出很强的非线性,常规PID控制采用固定的参数,很难保证被控系统参数变化时仍有很好的控制性能。预测函数控制方法具有计算量小、鲁棒性强、对大滞后对象控制效果十分理想的特点[2-4]。预测函数控制在焦化、电力、发酵等控制领域都有广泛的应用[3,5-6]。
本文针对三容水箱液位控制问题,采用PFC-PID串级控制建立液位控制系统,并与PID-PID串级控制结果进行比较。
1 三容水箱系统的机理建模
1.1 三容水箱系统描述
三容水箱液位系统组成如图1所示。由三个单相串联的水箱和储水箱组成,其中LT1、LT2、LT3是上、中、下水箱液位传感器;h1、h2、h3为上、中、下水箱液位高度。
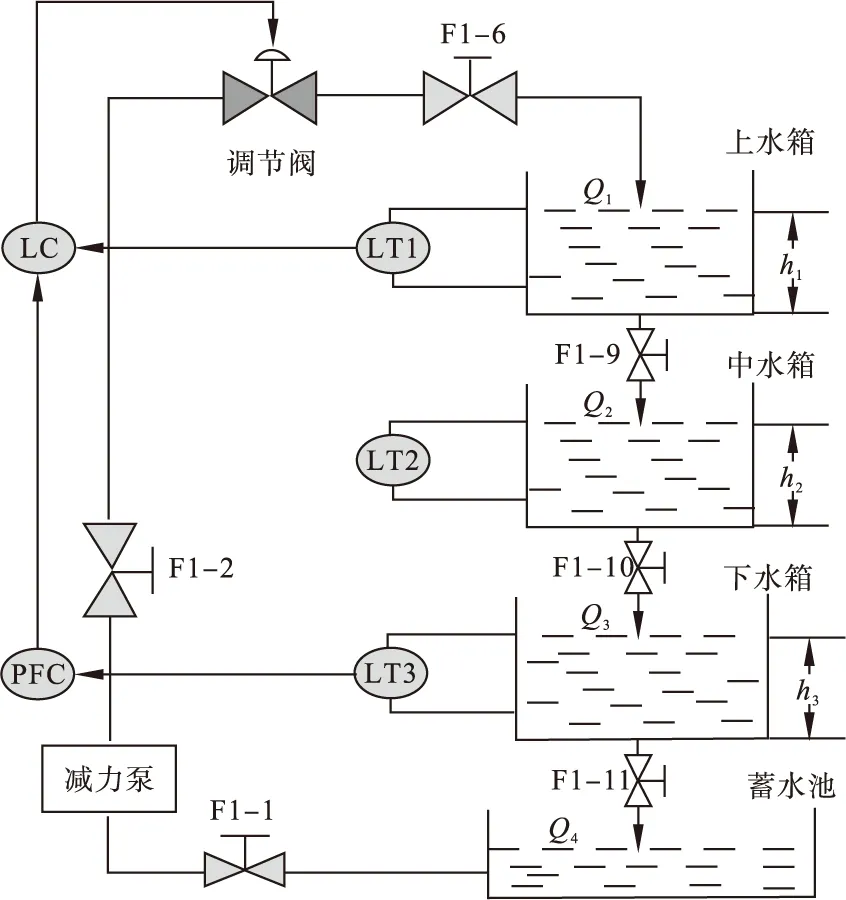
图1 三容水箱控制系统示意图
1.2 控制模型的建立
建模时与控制系统结合进行,本文将串级控制的副回路与中、下水箱一起作为广义对象来建立数学模型,根据阶跃响应曲线,采用两点法求取对象的近似数学模型。
最终得到对象近似的一阶惯性环节加纯延迟的数学模型,如式(1)所示;图2是测试曲线(虚线)和模型拟合曲线(实线)。
(1)
2 预测函数控制的基本原理
预测函数控制(PFC)是第三代模型预测控制算法,近年来成功地应用于工业机器人的快速高精度控制[7]。PFC同样具有模型预测控制的三个基本特征,即预测模型、滚动优化和反馈校正[8],其结构如图3所示。

图2 测试曲线和S模型拟合曲线
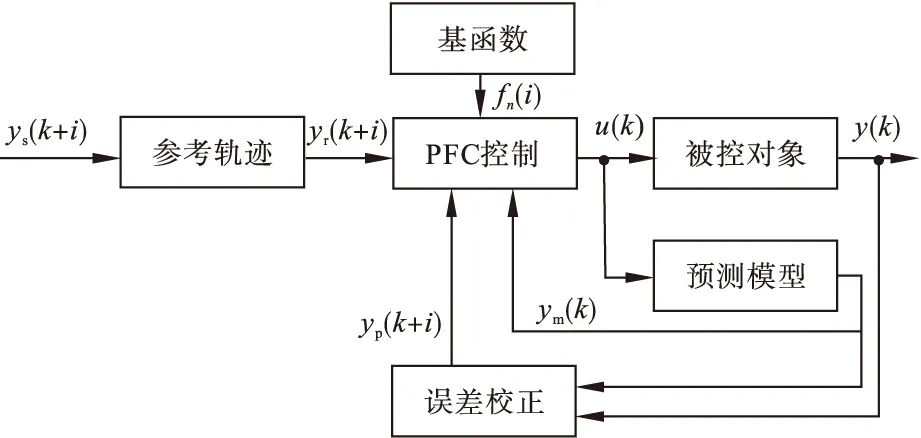
图3 预测函数控制的基本结构
2.1 预测模型[9]
在预测函数控制中,新加入的控制作用被表示为若干已知函数fn的线性组合。
(2)
式中:N是基函数的个数;P是预测时域;fn(i)是基函数fn在t=iTs(Ts是采样周期)时刻的值。
PFC的预测模型输出ym(k)由两部分组成,一部分为自由响应yz(k),另一部分为受迫响应yf(k),它是当前时刻起加入控制作用后新增加的模型响应。式(3)是PFC的模型输出。
ym(k)=yz(k)+yf(k)
(3)
2.2 滚动优化
对于一个稳定的系统,预测函数控制的参考轨迹通常选取一阶指数形式。
yr(k+i)=c(k+i)-λi(c(k)-yp(k))
(4)
在PFC的在线优化算法中,其优化性能指标如下式所示:
(5)
yp(k+i)=ym(k+i)+e(k+i)
(6)
式中:P1、P2是优化时域的下限和上限;yp(k+i)是过程的预测输出;ym(k+i)是k+i时刻的模型输出;e(k+i)是未来误差。
2.3 反馈校正
PFC的预测模型会存在误差,未来控制时域的误差e(k+i)可表示为
e(k+i)=y(k)-ym(k)
(7)
式中:y(k) 是当前k时刻的对象输出;ym(k) 是当前k时刻的预测模型输出。
2.4 预测函数控制算法
文中PFC预测模型采用一阶加纯滞后环节,如式(8)所示。
(8)
式中:Km是预测模型的稳态增益;Tm是时间常数;Tmd是模型的纯滞后时间。
加一个零阶保持器进行离散化,可求得模型输出值的差分方程。
ym(k+1)=αm·ym(k)+Km·(1-αm)·u(k-D)
(9)
式中:αm=e(-Ts/Tm),Ts是采样时间;D等于Tmd/Ts的整数部分。
因为设定值在预测时域里是一固定阀值,所以控制输入可以取一个基函数,即采用阶跃响应函数。
u(k+i)=u(k),i=1,2,...
(10)
根据PFC的特点,需根据当前已知的信息和未来加入的控制量来推导出未来预测时域过程中的预测输出值。先假设D=0,利用数学归纳法推导未来P步的模型预测输出值。
(11)

常见的参考轨迹形式为
yr(k+i)=c(k+i)-λi(c(k)-yp(k))
(12)
式中:yr是参考轨迹;λ=e(-Ts/Tr);Ts是采样周期;Tr是参考轨迹响应时间;c是设定值;yp是系统输出。
则k+H时刻的参考轨迹为
yr(k+H)=c(k+H)-λH·(c(k)-yP(k))
(13)

(14)
当D≠0时,参考Smith预估控制的思想,PFC仍采用D=0的模型,但对系统对象输出进行修正。
ypav(k)=yp(k)+ym(k)-ym(k-D)
(15)
其中ypav(k)是修正后的过程输出值。
e(k+H)=ypav(k)-ym(k)
(16)
综上所述,可以得到一阶加纯滞后过程的PFC控制输出。
(17)
3 预测函数控制在三容水箱中的仿真研究
3.1 控制系统结构
三容水箱液位控制系统采用PFC-PID串级控制结构,其中主控制器采用预测函数控制,副控制器LC采用P控制。其控制结构如图4所示。
3.2 仿真结果
仿真控制在Matlab环境下进行。PFC采用式(1)所描述的预测模型,控制算法的相关参数为:预测步长取15s,参考轨迹取时间常数0.1s的指数曲线,采样时间为1s,基函数为阶跃函数。仿真研究中,在液位设定值100mm时设定对象模型与预测模型失配,其中对象模型Tm=350s;在液位设定值40mm时对象模型与预测模型无误差;在时间400s时外加一幅值为30mm的阶跃干扰,其响应曲线如图5所示。
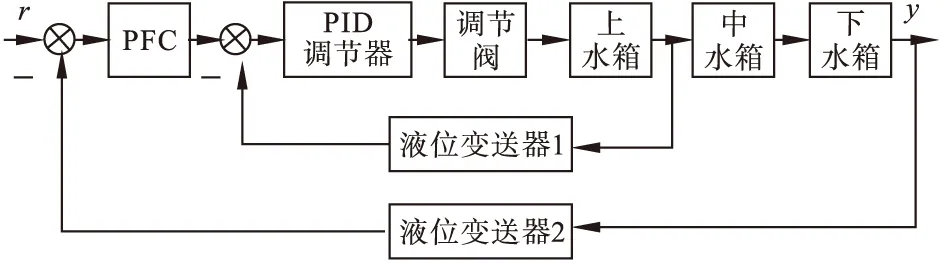
图4 控制系统结构图
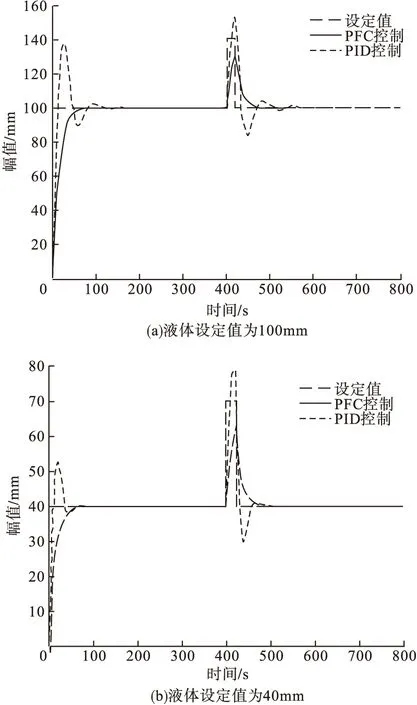
图5 PFC 与PID控制输出响应曲线
图5中a、b分别为采用同一个预测模型,不同对象模型所得到的在不同液位设定值100mm和40mm时液位控制响应曲线,并与常规的PID串级控制结果进行比较。从图5可以看到,在起始阶段PFC超调很小,施加干扰时PFC响应曲线波动较小,同时可看到PFC-PID具有较强的鲁棒性。
4 结论
本文在建立实际三容水箱机理模型基础上,构建了基于PFC-PID的三容水箱液位串级控制系统,并进行了控制结果仿真研究。结果表明,采用预测函数控制的三容水箱系统动态品质良好,整体性能优于传统的PID-PID控制。预测函数控制能够有效的抑制干扰,并具有较好的跟踪能力、较强的抗干扰能力和鲁棒性。
[1]赵科.三容水箱的机理建模[J].控制工程,2006,13(6):521-524.
[2]席裕庚,预测控制[M].北京:国防工业出版社,1993.
[3]张日东,薛安克,王树青,等.非线性预测控制与工业应用[M].北京:科学出版社,2012.
[4]黄德先,王京春,金以慧.过程控制系统[M].北京:清华大学出版社,2011.
[5]岳俊红.复杂工业过程多模型预测控制策略及其应用研究[D].北京:华北电力大学,2007.
[6]谢磊,张泉灵,王树青,等.基于多模型的自适应预测函数控制[J].浙江大学学报(工学版),2003,37(2):190-193.
[7]杨剑锋,赵均,钱积新,等.一类化工过程多变量系统的自适应非线性预测控制[J].化工学报,2008,59(4):934-940.
[8]Richalet J,et al.Predictive functional control:application to fast and accurate robots [C].Munich:IFAC 10th World Congress,1987:251-258.
[9]王国玉,韩璞,王东风.预测函数控制及其应用研究[J].系统仿真学报,2002,14(8):1087-1091.
(责任编辑:马金发)
Research of Predictive Function Control Algorithm in Three-tank Water Level Control
JI Zhenping,ZHANG Yang,ZHANG Xiaojie
(Shenyang Ligong University,Shenyang 110159,China)
Three-tank level control is typical nonlinear and long-delay object.For conventional PID control with long response time and large overshoot,predictive functional control(PFC)cascade control strategy is adopted for the three-tank water level control.According to the actual measured three-tank water level data,the predictive model is established.The PFC is taken as the main controller in three tank level control system.The simulation results show that the dynamic performance of control system based on PFC is superior to conventional PID control algorithm which has strong robustness and anti-interference ability.
three tank;level;predictive functional control;PID control
2014-09-04
国家自然科学基金资助项目(61273178)
纪振平(1964—),男,教授,研究方向:复杂工业过程建模、优化与控制;通信作者:张晓杰(1964—),女,副教授,研究方向:工业过程控制.
1003-1251(2015)03-0001-04
TP273
A
