兵力大于需求时网络雷达对抗系统的优化部署*
2015-01-04姜林周敬博胡波
姜林,周敬博,胡波
(1.电子工程学院,合肥230037;2.解放军61646部队,北京100000)
兵力大于需求时网络雷达对抗系统的优化部署*
姜林1,周敬博2,胡波1
(1.电子工程学院,合肥230037;2.解放军61646部队,北京100000)
对于配发兵力大于需求时的情形,可将所配发设备分为等于需求和多出需求两部分。对于等于需求的的那部分兵力,建立多目标规划模型并采用并列选择法对模型进行求解;对于多出需求的的那部分兵力,主要作为预备兵力使用,建立优化模型并通过矩阵元素剔除法及粒子群算法对模型进行求解。
大于需求,原则量化,优化模型,并列选择法,矩阵原则剔除法
0 引言
网络雷达对抗系统是通过网络技术将地域上分散的、异地配置的发射站、M个接收站、1个网络中心站联接成一个整体,形成一个时域、空域、频域协调工作的新型雷达电子战系统[1]。蓝方的突袭行动主要包括突防、开机搜索和轰炸目标3个阶段[2],防空时网络雷达对抗系统在不同阶段分别执行雷达探测、雷达对抗侦察及雷达干扰3大任务[3]。
1 部署相关原则的量化
对配发设备数量大于最优兵力需求时的情形,将所配发兵力分为等于需求和多出需求两部分。对于等于需求部分兵力的优化部署要考虑覆盖任务区、站间距等原则。对于多出需求的那部分设备,指挥者主要考虑作为预备兵力使用。有关部署的相关原则及量化如下。
1.1 等于需求部分的量化原则
1.1.1 完全覆盖原则
原则1:网络雷达对抗系统的干扰范围实现对雷达干扰任务区的完全覆盖。可用雷达干扰任务区覆盖系数描述,区域面积可用S(·)表示。这一原则可描述为:

原则2:网络雷达对抗系统的侦察范围实现对雷达对抗侦察任务区的完全覆盖。可用雷达对抗侦察任务区覆盖系数来描述,这一原则可描述为:

原则3:网络雷达对抗系统的探测范围实现对雷达探测任务区的完全覆盖。可用雷达探测任务区覆盖系数描述,这一原则可描述为:

1.1.2 相互间距原则
原则4:频率有重叠的发射站距离不能太近,避免同频干扰。设干扰站的最小间距r。设第i个发射站配置点的坐标为(xti,yti),i=1,2,…,m,这一原则可描述为:

原则5:干扰站与被保卫目标必须保持一定距离,以有效压制来袭敌机的雷达。当机载雷达扫视到目标边缘时,干扰站仍可对机载雷达干扰。通常情况下,θ的取值在雷达半功率波束角的一半与90°之间,因此,考虑有效压制时干扰站与目标最小距离为p1;暴露区随干扰站与被保卫目标间距的增大而增大,当最小暴露半径等于最小必须压制距离时对应最大间距q1。因此,原则5可描述为:

原则6:发射站与被保卫目标不能太近,避免附带损伤。考虑到这个因素,配置时上级一般要求干扰站距目标的距离不得小于p2,这一原则可描述为:

原则7:接收站与被保卫目标必须保持一定距离,以易于指挥及作战。第j个接收站配置点的坐标为(xrj,yrj),j=1,2,…,n,因此,考虑原则7时接收站与目标的间距范围为:

原则8:接收站与被保卫目标不能太近,避免附带损伤。考虑到这个因素,配置时上级一般要求接收站距目标的距离不得小于g,这一原则可描述为:

1.1.3 杜绝空档原则
原则9:适当的空域覆盖冗余度,避免出现干扰空档。如图1(c)所示,每一干扰站负责特定区域时,第i个干扰站的作战范围与雷达干扰任务区的交点为(xtis,ytis),s=1,2,3,4。为实现对任务区域的完全覆盖,应使系统相邻干扰单元的作战范围覆盖任务区域的交集之间无空隙,用公式表示是:

原则10:适当的空域覆盖冗余度,避免出现侦察空档。如图1(b)所示,第j个接收站的作战范围与雷达对抗侦察任务区的交点为(xrjs,yrjs),s=1,2,3,4。这一原则可描述为:

原则11:适当的空域覆盖冗余度,避免出现探测空档。如图1(a)所示,系统处于有源工作模式时与雷达探测任务区的交点为(xtirjs,ytirjs),s=1,2,3,4。这一原则可描述为:

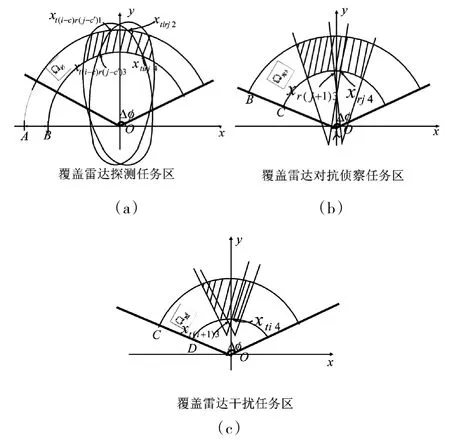
图1 相邻作战范围无空袭覆盖任务区域
1.2 多出需求部分的量化原则
1.2.1 合理分配原则
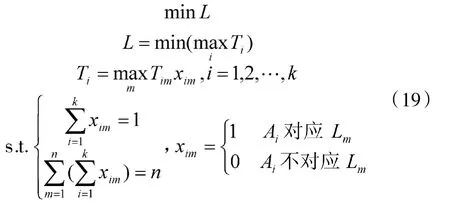
原则12:部署在任务点的设备出现损坏或被敌摧毁等意外情况时,预备兵力应尽快地进行补充。设一共有k个预备兵力点,n个任务点,预备兵力Ai到达任务点Lm的时间为Tim。任何一预备兵力面向其对应的所有任务点,所以某一预备点可补充兵力的及时性应由Tim的最大值确定。

有关xim将在原则5中详细叙述。
原则13:预备兵力应面向所有任务点。在原则1中可知,每一预备兵力对应各自的任务点,Ti必有一个最大值,表示配发的预备兵力可向所有任务点补充兵力的时间。

原则14:预备点应对应合适的任务点,使补充兵力时间尽可能短。每一分配方案中,Ti必有一个最大值。所有方案中覆盖所有任务点的最小时间即为最佳分配方案。

1.2.2 优化选点原则
原则15:选取合适的预备兵力点,使补充兵力的时间最短。不同的预备点对应不同的任务分配方案,其中应使L尽可能小。

1.2.3 完全对应原则
原则16:一个任务点只有一个预备点补充兵力。预备兵力Ai若对任务点Lm补充兵力xim则等于0,反之为1。

原则17:各任务点都应有接收预备兵力补充的可能。

2 部署的优化模型
2.1 等于需求部分的优化模型
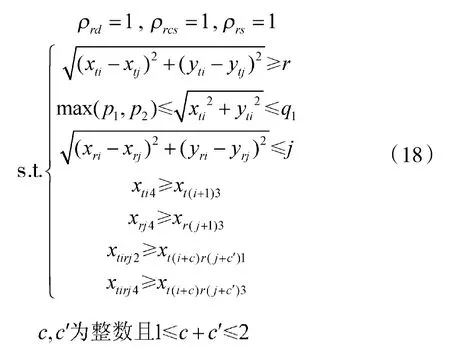
原则1~原则3结合系统的工作模式及上级规定的任务要求,考虑了网络雷达对抗系统主要功能即完全覆盖雷达干扰任务区、雷达对抗侦察任务区与雷达探测任务区,因此,原则1~原则3应作为部署模型的主体。原则4~原则6强调发射站与目标间距及站与站的间距限制,原则7,原则8强调接收站与目标间距及站与站的间距限制,原则9~原则11强调的是避免雷达干扰、雷达对抗侦察及雷达探测出现空档,这些原则可以作为约束条件处理。根据上面的分析,可建立等于需求部分的部署优化模型如下:
2.2 多出需求部分的优化模型
原则12~原则14考虑了网络雷达对抗系统的预备兵力可对所有任务点有效补充前提下的合理分配问题,即如何分配兵力可使补充时间尽可能短。原则15是在原则1~原则3的基础上,考虑如何选取合适的预备兵力点使最小。原则1~原则4应作为部署模型的主体。原则16,原则17强调了任何一个任务点只需一个预备点补充兵力,且所有任务点必须有预备兵力点对应,这些原则可以作为约束条件处理。根据上面的分析,可建立多出需求部分的部署优化模型如下:
3 模型的求解算法
3.1 等于需求部分的求解算法
本文采用并列选择法这一多目标遗传算法对模型进行求解,按子目标函数的个数将群体划分为一些子群体,每一子群体中相应的子目标函数独立地进行运算,选择适应度高个体组成新子群体后再合并成群体,通过交叉和变异运算生成下一代群体,再进行“分割—并列选择—合并”操作,最终可获取pareto最优解。下页图2为求解多目标决策问题的并列选择法示意图。
运用并列选择法,多目标遗传算法具体实现步骤如下:
步骤1:编码。
步骤2:确定适应值函数1,适应值函数2和适应值函数3。
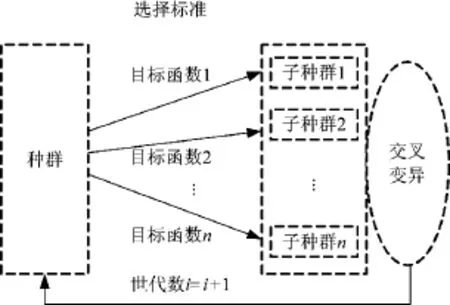
图2 并列选择法的示意框图
步骤3:选定种群规模,均等划分为子群体1~子种群3。
步骤4:对每一个子群体进行适应度计算评价,依据适应值函数选择子种群1~子种群3。
步骤5:合并子种群进行交叉和变异操作。
步骤6;重复步骤4至步骤5,直到完成给定的循环次数。
步骤7:找出最好染色体作为最优策略。
3.2 多出需求部分的求解算法
部署多出需求的那部分兵力时,每一种配置方案都对应多个分配方案。本节首先采用矩阵元素剔除法建立最佳任务方案模型,进而运用粒子群算法求取预备兵力的最优位置。
3.2.1 矩阵元素剔除法获取最佳任务方案
对于任意部署方案,建立任务调度时间矩阵:
利用矩阵元素剔除法可得到最佳任务方案。
(1)矩阵最大元素剔除原则[6]
选取任务调度时间矩阵中值最大的元素,如果该元素满足以下两个原则就可以剔除,反之则应保留。①至少存在一个未被剔除的元素与该元素值不同且在同一列;②剔除该元素后一行中至少有一个未被剔除元素的总行数大于等于n。
(2)最佳任务方案求取步骤
步骤1:在任务调度时间矩阵中选取一个指标M0,剔除大于该指标的元素;
步骤2:若M0符合矩阵最大元素剔除原则,剔除该元素;反之则确定M0所在“行数”的预备兵力负责所在“列数”的任务点,同时划去对应的行与列;
步骤3:求矩阵中剩余元素的最大值M1,重复
步骤2直至获得最佳任务方案。
3.2.2 粒子群算法求取预备兵力最优位置
(1)预备兵力最优部署思路
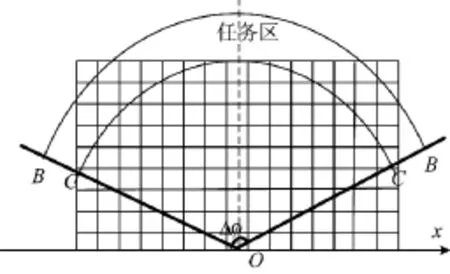
图3 粒子化可部署区域
如图3所示,将预备兵力的可配置区域划分为一个个的粒子,兵力可在这些粒子中移动。当位置一定后,通过矩阵最大元素剔除法可求取此时的最佳分配及L值,更新预备兵力位置后,L值也随之改变。从中选取L值最小的配置为最优配置。
(2)粒子群算法的实现步骤[7]
粒子群算法的具体实现步骤如下:
步骤1:选定种群规模,对种群中所有个体粒子进行速度和位置的初始化;
步骤2:对每一个个体粒子进行适应度计算评价;
步骤3:更新个体粒子的当前最优位置pbest。方法是将步骤2计算出的适应值与之前最优位置比较,若更好,将其选定为pbest,反之保留之前值;
步骤4:更新个体粒子的全局最优位置gbest。方法是将计算出的适应值与之前的全局最优位置比较,若更好,将其选定为gbest,反之保留之前值;
步骤5:更新个体粒子的位置和速度;
步骤6;判断适应值是否达到最大,若是结束,否则返回第2步。
4 示例分析
依据任务要求,网络雷达对抗系统要在120°范围内有效保卫目标。“雷达探测搜索线”距目标距离为300 km,“雷达对抗侦察任务起始线”距目标为200 km,“雷达干扰任务起始线”距目标为120 km,“雷达干扰任务终止线”距目标距离为15 km。突袭机群由若干个3机小编队组成,编队内采用楔形队形,各机间隔一般为300 m~700 m,各编队从3个方向攻击目标,相邻编队之间间隔为60km,同一方向上编队起飞时间间隔为10 min,飞行速度为800 km/h。根据指战员要求,上级需配发10个发射站,2个接收站才能有效保卫目标。现在上级配发了12个发射站,2个接收站,问应当如何部署。
4.1 等于需求部分的优化部署
(1)计算发射点及接收点数量
每个发射点需配置2个发射站才可对敌机进行有效探测及干扰,,则根据配发兵力,一共有发射点个数为:
每个接收点需配置1个接收站方可完成对敌机的有效探测及侦察,,则根据配发兵力,一共有接收点个数为:
(2)多目标遗传算法求解模型
设种定群规模为100,迭代次数为50,代沟为0.9,变异概率Pm=0.2。经过50次遗传迭代后,最优部署如表1所示。
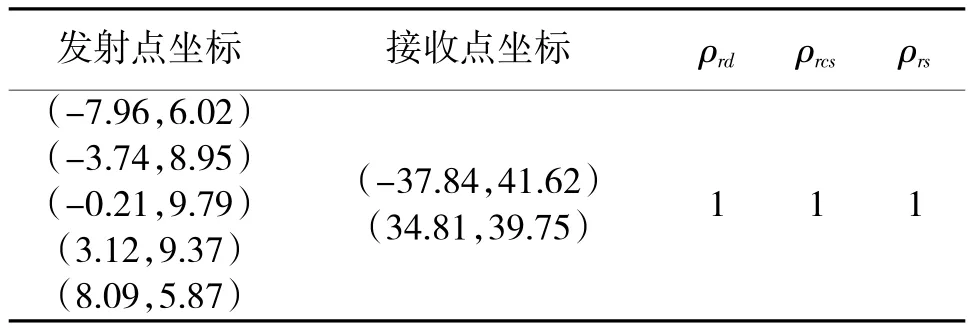
表1 优化部署输出表
系统优化部署图如图4所示。
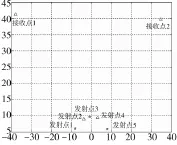
图4 系统优化部署图
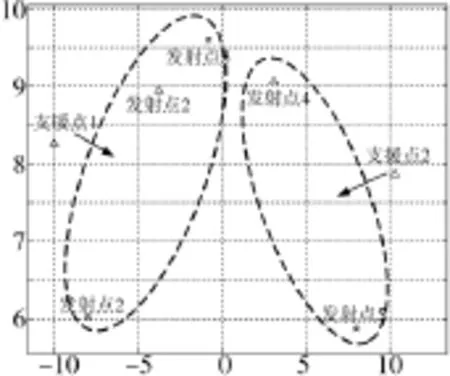
图5 多出兵力的优化部署及负责任务点
4.2 多出需求部分的优化部署
设支援速度为40 km/h,设定种群规模为30,叠代次数为100,结合矩阵元素剔除法及网格剖分算法,编程可得多出发射站部署、负责任务点等结果如表2所示,仿真如图5所示。
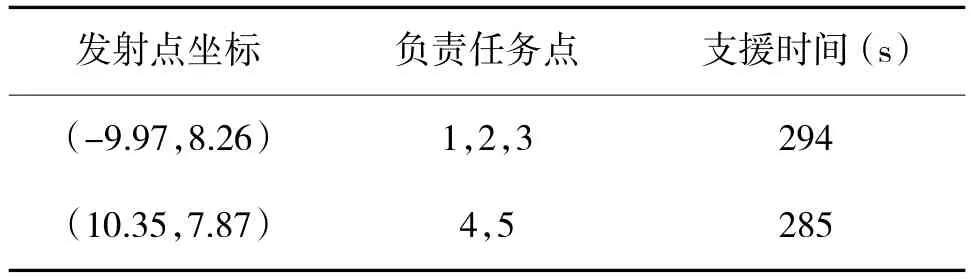
表2 优化部署输出表
[1]姜秋喜.网络雷达对抗系统导论[M].北京:国防工业出版社,2010.
[2]周向阳,林涛.东南沿海方向电子防空作战研究[J].地面防空兵,2012(4):4-10.
[3]袁学堂,张相炎.武器装备概论[M].北京:国防工业出版社,2011.
[4]韩国玺,何俊.基于灰色AHP的网络雷达对抗系统的综合效能评估[J].中国雷达,2013,17(1):4-7.
[5]刘方正,祁建清.网络雷达对抗系统侦察效能评估模型研究[J].现代雷达,2013,35(1):29-34.
[6]张海燕,许新琨.交巡服务平台的任务分配与调度研究[J].电子工程学院学报,2012(4):73-76.
[7]伍思敏.多目标粒子群优化算法的改进及应用研究[D].无锡:江南大学,2013.
Optimization Research of Operational Deployment for Network Radar Counter-Measure System Under Condition of Troops Oversupply
JIANG Lin1,ZHOU Jing-bo2,HU Bo1
(1.Electronic Engineering Institute,Hefei 230037,China;2.Unit 61646 of PLA,Beijing 100000,China)
In this article,the troops can be divided into two parts of equal to the demand and extra demand when troops is greater than demand.For the part of the force is equal to the demand,the Multi-objective programming model is established and uses tied for choice method to solve.For the part of the force is extra demand,setpoint and completely corresponding are optimized,the optimization model is established and uses matrix element strip method and particle swarm optimization to solve.
greater than demand,quantitative the principles,optimization model,tied for choice,matrix element strip
E939;O224
A
1002-0640(2015)12-0031-05
2014-11-26
2015-01-07
国家自然科学基金资助项目(KY09016)
姜林(1989-),男,山东烟台人,硕士研究生。研究方向:系统建模与仿真。
