大幅面广角数字航摄系统UCXP-WA及其应用
2014-12-11陈洁杨达昌杜磊
陈洁,杨达昌,杜磊
(中国国土资源航空物探遥感中心 遥感部,北京 100083)
0 引言
随着数字技术的发展,遥感手段已迈入全数字时代。数字航摄系统也逐步取代了传统的胶片像机,成为航空遥感数据获取的主要方式。高精度的航空遥感基础数据在国土资源调查、地质勘探、城市规划和环境动态监测等方面得到了广泛应用。新型的UCXP WA大幅面广角数码航摄系统,采用创新的广角镜头,焦距更短,在相同高度飞行条件下获取的影像地面分辨率更高,同时集成AV POS 510惯性导航系统,曝光瞬间即获得高精度像片中心点外方位元素,可快速制作数字高程模型(DEM)和正射影像(DOM)等产品,无需地面控制测量,极大地提高工作效率,为进行下一步地质调查研究提供详实可靠的基础数据。
本文首先从硬件和软件2方面对该系统进行了介绍,然后对其湖南实践飞行获取的数据,利用特有的INS/GPS紧耦合方法进行单基站和PPP融合解算,并对精度进行评价,为今后使用该系统进行生产作业提供参考依据。
1 航摄系统主要特性
UltraCamXP WA(wide-angle)数字航摄系统,是由Microsoft Vexcel公司研发的新型数字航摄仪,自2004年发布第一代产品至今,该航摄系统是其第四代产品,与其它数字航摄像相比,具有以下5个方面的特性:
(1)超大的影像幅面,可达19600万像素(17310×11310),增加了基线长度,减少了航线数量,有效地缩短飞行时间;一次飞行可同时获取全色黑白、真彩色和彩虹外数码影像;通常数码航摄像机的弊端是由于CCD尺寸问题,其获取的影像幅面较小,造成对地面的覆盖范围较传统的航摄仪要小,使得覆盖相同面积区域的航片数增多,从而增加后期地面和内业工作量,并在此过程中,产生了一些累积误差,使最终产品精度不高。UCXP WA型航摄仪,具有17310×11310像素 ,像素大小6μm,相当于34.6cm×22.6cm的传统胶片以20μm进行扫描时的像幅大小。目前市场上主流的数码航摄仪的像幅,ADS80是它的69%,DMC是它的79%,UCX是它的83%。这在进行具体生产时,能大大减少航线数目,提高工作效率。
(2)2s的曝光间隔,一方面保证了影像重叠度,另外使低空高速获取影像数据,进行大比例尺测图成为可能;获取的数字影像辐射分辨率最高达16bit,能获取更丰富的地物细节信息,也为后期的影像均光处理工作提供便利;并具有1∶3的融合比,能一次获取真彩色、彩虹外和全色黑白的高品质影像,输出的影像是真正通用的中心投影影像,兼容后期各种摄影处理软件。
(3)部件接口均按照国际标准制作,最大限度地利用现有设备,支持通用的陀螺稳定座架和POS系统;配备专业的机载飞控系统POS Track,基本实现航摄的自动化;
(4)优秀的POS Track软件可进行航摄设计,并利用DEM作为底图对测区航线进行优化,保证了设计方案的可靠性和高效性;还支持其他软件设计方案的导入;影像处理由UltraMap软件完成。
(5)内部集成的高精度Aplenix AV510惯导设备,能在曝光瞬间获取影像姿态信息,可快速制作DEM、DOM等产品。
2 UCXP WA航摄系统主要硬件和软件
2.1 传感器单元

图1 UCXP WA航摄仪传感器
传感器单元由4个全色镜头、3个RGB镜头和1个近红外镜头组成,摄影时采用同位延迟曝光技术,即每个镜头都在相同的位置曝光,再将得到的8幅影像进行无缝拼接,得到一幅最终影像成果。传感器单位的详细参数指标如下表1所示:

表1 UCXP WA航摄仪传感器性能指标
2.2 数据存储和处理单元
机载数据存储和处理单元的单个容量大于4.2TB,可进行约6600张无压缩影像的记录,所有数据进行镜像保存,保证数据完整安全;可在空中更换,单架次获取的影像数量无上限,如图2所示。

图2 数据存储和处理单元
2.3 飞行导航系统
飞行导航系统分为POS Track和NanoTrack两种(如图3所示)。其中POS Track是将Applanix公司的POS AV直接地学定位技术和Track航空公司的XTRACK飞行管理系统(FMS)软件紧密集成为一个小巧坚固耐用的系统。它是一个独立的系统,小巧、方便,不需要复杂的线路和连接器的网络,就可以简便地安装在任何一个飞行器上进行任务规划、飞行导航、稳定平台和传感器自动控制等航空摄影工作,还具有空中初始化、调平稳定平台、自动修正偏流等功能。该系统可为航空摄影测量提供每幅影像或扫面点的外方位元素,从而减少野外控制点,降低工作成本,提高工作效率。提供最高水准的精度和效率,POS Track为机载制图传感器、实时传感器控制和飞行导航提供直接地学定位。
若不使用机载POS系统获取影像姿态数据时,则可使用NanoTrack导航系统,它是由美国Track-Air公司生产的飞行管理系统。该系统功能强大、携带方便、安装简单,与其他设备的兼容性较强。NANOtrack是新一代的入门级航测飞行管理系统,可以连接任何计算机传感器接口。
2.4 稳定陀螺座架
UCXP WA航摄系统配备德国SOMAG生产的GSM3000型三轴陀螺稳定座架(如图4)。航空摄影中稳定装置主要应用于像移补偿,其主要优点是:
(1)大幅降低由大气震荡带来的角速度影响。这会使在曝光时间内产生更少像移宽度。因此可以允许延长曝光时间并扩展航摄的条件甚至在多云条件下。

3 飞行导航系统POSTrack(上)和NanoTrack(下)
(2)消除在曝光时突然情况(如大气紊乱造成的)带来的翻转,倾斜和偏移角度。这会导致影像间的重叠差异大幅降低。
(3)GSM3000的三轴调节是由液压系统完成,灵敏度高,它与机载POS系统交联,实现了姿态的自动整平,无需人工干预。即保证了曝光瞬间的稳定姿态,又显著提高了惯性测量单元(IMU)的数据采集精度。

图4 GSM3000三轴陀螺稳定座驾
2.5 数字影像后处理软件
UCXP WA配备专业的UltraMap数据后处理软件系统,它是由MicroSoft Vexcel公司发布的摄影测量系统。它针对UltraCam影像数据提供从0级影像到最终DOM、DEM、DLG产品制作的完整的高度自动化的工作流程。UltraMap采用微软最新的FrameWork及Dragonfly技术,管理数据的下载,0~3级影像数据的分布式处理,空三加密,DSM/DTM、正射影像制作及交互式数据可视化质量控制。它具有以下特性:
(1)提供高度自动化的影像处理流程;分布式数据处理,能够提高数据处理效率;可视化的处理平台,操作简单。
(2)空三模块支持同一加密分区划分为若干子区进行平差,从而无需加密区接边及工程合并,即可实现大区域的整体平差;支持多张原始影像同时增加控制点。
(3)采用多基线自动匹配技术实现DSM的自动生成;采用 Winston-Salem滤波技术实现地物的自动去除,生成DTM产品。
(4)可进行真正射产品的制作。
2.6 机载POS数据解算软件
采用POSPac MMS(POSPac Mobile Mapping Suite)进行机载POS数据后处理,该软件是Applanix公司开发的用于获取运动物体高精度位置,姿态和速度的POS系统处理软件,它提供了一套可视化的界面帮助分析计算结果,保证数据的质量。该软件拥有其专利的IN-Fusion和SmartBase紧耦合数据解算技术,其优势在于:
(1)采用卡尔曼滤波对IMU和GPS进行误差探测,利用IAKAR(Inertially-Aided Kinematic Ambiguty Resolution)技术,保持惯性测量单元(IMU)定位精度,确保即使GPS出现问题时,也有较稳定的整周模糊度;并在GPS失锁后,能快速完成对整周模糊度的解算,并确保水平方向厘米级的定位精度;消除了航摄飞行时对转弯角小于20°的要求。
(2)SmartBase技术是基于虚拟参考站技术而发展的,它依赖于一个基站网络,从而能很好第获得整周模糊度的固定解,并为基站和流动站建立电离层改正和几何改正模型;大大提高了基站与测区内任一点的距离,在测区周边有足够CORS站(连续运行卫星定位服务综合系统,Continuous Operational Reference System)时,可无需进行地面基站的架设,解算的数据可达厘米级精度要求。
POS MMS的数据解算流程如图5所示。
3 UCXP WA航摄系统的应用
研究数据采用湖南实践飞行数据,航摄系统采用UCXP WA,实践区基准面高程70m,航摄相对航高500m,航向重叠和旁向重叠分别为65%和35%,地面分辨率5cm。共飞行5条航线,获取航片130张。地面基站就布设在实践区内部,距离测区任一点的距离不超过30km。

图5 机载POS数据后处理流程图
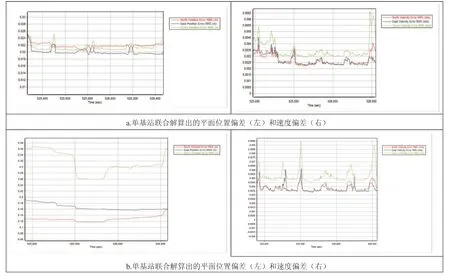
图6 机载POS联合解算结果
首先,使用UltraMap图像后处理软件对获取的影像进行从0级到3级的处理。在处理时,第一步先生成原始未调色的影像,再根据其直方图和色彩平衡,进行色彩调整和均光处理,充分体现了数字影像的优势。调色时可选取几张具有代表性地物的影像进行精细化调整,达到满意效果后,可将调色方案应用到整条航线、整个架次甚至整个测区的影像。从而保证了即使测区面积较大,飞行架次较多,最终成果的色调仍能保持一致。
然后,应用INS/GPS紧耦合方法对机载POS数据的处理精度(如图6a和6b所示)可以看出,不论采用单基站(single base)法或者精密单点定位(PPP)法联合解算,其位置精度和姿态精度,均能满足《IMU/GPS辅助航空摄影技术规范》中1∶500比例尺平面偏差限值0.08m,高程偏差限值0.3m,速度偏差限值0.4m/s的规定。保证了后期成果制作的精度。另外,机载POS数据还记录了航向角、飞行轨迹、飞行高度等多种信息,通过这些信息,可以初步进行飞行质量的检查,改变了传统航空摄影先冲印照片再质检的作业流程,缩短了工作时间,并且所有工序和解算均由计算机完成,无需人工干预,基本实现了全数字化质检。
综上所述,UCXP WA型航空摄影系统,具有大幅面、高分辨率、实时获取高精度姿态数据等优势。该设备目前还正在执行国家基础航空摄影——厦门测区任务。
4 结束语
大幅面广角数字航摄系统UCXP WA,不仅在同类航摄仪中,具有许多优势,它集成的机载POS系统,使快速进行4D产品的制作成为可能,特别是在应急灾害、遥感地质调查等项目任务中,必将发挥重要的作用。
[1]喻鸣,向浩.UCD数码航测相机效率分析[A].全国测绘科技信息网中南分网第二十四次学术信息交流会论文集[C].2010.
[2]宫照.几种常见数字航摄仪的分析与比较[J].测绘工程,2010(1):46-50.
[3]郭洪周.最新引进的高精度RMK-TOP航摄仪及其应用[J].地质装备,2001(3):27-30.
[4]国家测绘局.IMU/GPS辅助航空摄影技术规范[S].GB/T 27919-2011.北京:中国标准出版社.2011.