激进驾驶状态识别算法研究*
2014-10-11徐少兵王文军
成 波,徐少兵,王文军,张 维,张 波
(清华大学,汽车安全与节能国家重点实验室,北京 100084)
前言
急制动、急换线等激进驾驶行为是道路交通安全的重要影响因素,但难以采用法规进行限制。美国交通部的统计结果显示,39%的受访者认为激进驾驶是最大的安全威胁,90%的受访者认为曾被他人激进驾驶所影响[1-2],激进驾驶已被认为是现代道路交通安全的最大隐患之一[3]。
激进驾驶识别可用于车辆的监管,尤其是营运车辆。研究显示,营运车辆驾驶员(如出租车司机)更易于激进驾驶,比普通驾驶员引发或者被牵涉进交通事故的概率高53%左右,每年20%~65%的营运车辆会卷入交通事故[4]。所以识别出激进驾驶状态进而向驾驶员提供适当预警将有助于减少交通事故,具有一定的社会和经济意义[5-6]。
现阶段对激进驾驶的研究主要集中在其影响因素和相关性上,主要采用问卷和访谈等调研方法。文献[3]和文献[7]中对年龄、性别、交通条件、乘客、技术等主要因素的影响程度进行统计和量化;文献[2]和文献[8]中对激进驾驶和激进驾驶员的关系,激进驾驶和愤怒、压力的关系进行了研究,激进驾驶并不等同于激进驾驶员的驾驶,激进驾驶员处于激进驾驶状态的概率比普通驾驶员高,温和的驾驶员出于愤怒、紧急事件等原因也可能处于激进驾驶状态;文献[9]中认为现阶段的激进驾驶定义过于模糊,缺乏量化定义,给监管和研究带来困难。实际上,量化定义激进驾驶行为存在两个难点:(1)驾驶行为种类繁多,难以解析出驾驶行为的主要影响因素和建立统一的描述方法;(2)难以量化评价驾驶行为的激进程度,即评价指标和体系的构建。
针对上述难点,本文中从车辆运动的角度定量评价驾驶激进程度,重点关注驾驶行为的描述方法和评价指标构建,旨在形成驾驶员的激进驾驶状态识别算法,以应用于激进驾驶预警等系统中,通过加强对驾驶员的反馈和约束以减少交通事故的发生。该系统在对营运车辆驾驶员的管理和监控方面有广阔的应用前景。
1 驾驶状态的数学描述
激进驾驶状态识别指建立一套驾驶状态量化评价算法,并据此将驾驶状态划分为正常、较激进和激进3个等级。驾驶状态是驾驶员在一段时间内驾驶行为的综合体现,如频繁的鲁莽驾驶行为直接反映了驾驶的激进性,因此对驾驶状态评价的基础是建立驾驶行为的评价方法。驾驶行为是驾驶员通过对转向盘、加速踏板和制动踏板的复合操作实现对车辆的控制,同时每种操作的强度存在差异,因此驾驶行为的表现形式多样(如急换线过程中复合急加速),常用的穷举法只能针对部分典型的驾驶行为。实际上,驾驶行为的“多样性”导致难以建立严格的数学描述体系,进而导致难以建立统一的驾驶状态量化评价指标。
基于上述分析,本文中提出“驾驶状态-驾驶行为-驾驶模式”3层结构的描述体系,图1为该描述体系的结构示意图。
如图1所示,一段时间T内的驾驶状态S由驾驶行为Be1,Be2,…,BeN综合而得。驾驶行为指完成某一驾驶任务而采取的一系列驾驶操作,具体操作按其功能可细分为5类:实现制动、加速、换线、转弯的操作以及跟车距离的控制,本文中定义其为基本驾驶模式。其中制动模式可由释放加速踏板或者踩下制动踏板实现,换线模式体现为快速小幅旋转转向盘以实现变换车道,转弯模式体现为保持转向盘转角在合适范围内以实现弯道行车(不包括低速调转车头朝向的行为)。
基本驾驶模式是完成驾驶行为中的子任务而采取的特定操作,是驾驶行为的基本组成元素,可以更细化地描述驾驶行为。如弯道超车行为,驾驶员须“保持转向盘过弯→踩下加速踏板加速→快速小幅旋转转向盘换线→快速小幅旋转转向盘再换线→释放加速踏板减速”,对应的驾驶模式为“转弯模式-加速模式-换线模式-换线模式-制动模式”。其中,转弯模式和换线模式虽然都是由操作转向盘实现,但其操作方式和实现的功能均不同。实际上,任一驾驶行为都可由 B(制动)、A(加速)、F(跟车距离)、L(换线)、C(转弯)5类基本驾驶模式复合而得,某些驾驶行为也可以只由一类驾驶模式组成,如加速行为只包含加速模式。
根据上述驾驶状态3层结构可建立其数学描述方法:(1)任何一驾驶行为Be都可以通过一个由基本驾驶模式构成的5元向量来描述;(2)一段时间T内的驾驶状态S可通过N个驾驶行为的时间序列来描述,即由基本驾驶模式构成的5×N的矩阵:
上述驾驶状态数学描述方法具有如下特点:通过对行为的分解得到物理意义明确的基本驾驶模式,且层次结构利于驾驶状态的数学表达;通过这种层次结构,可以将驾驶状态的评价转化为对各个基本驾驶模式的评价。
2 激进驾驶状态识别算法
在建立驾驶状态数学描述的基础上,进一步提出驾驶模式激进指数来衡量基本驾驶模式的激进程度,并建立驾驶状态识别算法。
2.1 驾驶模式激进指数
驾驶员的驾驶行为激进程度难以直接通过人体的生理指标客观评价,实际上,驾乘人员可以通过车辆的运动状态对驾驶激进程度进行主观评价。如果采用定量指标来模拟描述经验驾驶员对激进驾驶的主观评价,将可以量化激进驾驶的程度,进而形成一套客观评价方法。
在驾驶模式激进程度评价中,核心为评价指标的构建,其须满足如下条件:(1)具有线性累加性,“驾驶状态-驾驶行为-驾驶模式”3级中,上级的激进程度是下级的复合,如驾驶行为的激进程度是各驾驶模型激进程度之和,这就要求不同驾驶模式的评价指标具有同量纲和线性可加性;(2)采用的变量能有效地表达车辆运动特性。
基于上述分析,通过量化驾乘人员对车辆加速度的主观感受得到驾驶激进程度的量化衡量指标。选择加速度作为基本评价参数的原因为:加速度是5类驾驶模式的核心特征参数,也是驾乘人员对车辆运动感知的最敏感刺激输入。
在量化描述人的主观感受与客观刺激之间的关系时,通常采用由美国心理学家Stevens提出的幂定律:人的主观感受同外界刺激的幂指数成正比[8]。本文中提出以加速度为刺激输入的驾乘人员主观感受作为衡量激进程度的指标,即激进指数为
式中:Ei为驾驶模式i的激进指数;Ti为驾驶模式i历经时间;ai为驾驶模式i对应的敏感方向加速度;f(·)为人对加速度刺激的感受函数;wi为权重系数;x为幂指数;i为驾驶模式编号,1代表制动模式B,2代表加速模式A,3代表跟车距离控制F,4代表换线模式L,5代表转弯模式C。
驾驶模式i的激进指数Ei物理意义为:人对驾驶模式i的敏感方向加速度刺激的主观感受在驾驶模式历时内的累积。ai为各驾驶模式的敏感方向加速度,其中制动、加速模式对应纵向加速度,换线、转弯模式对应横向加速度,跟车控制模式的激进性体现在跟车距离控制不当造成潜在追尾危险,为此提出跟车模式等效加速度作为跟车模式激进指数的刺激输入,即
式中:vs为自车车速;vf为前车车速;D0为两车相对距离;a2为预期前车平均制动减速度,取-0.3g[10];τ 为驾驶员反应时间,取 0.5s[10]。
式(3)物理意义为:某一跟车时刻,若前车以减速度a2制动,则自车为避免碰撞须采取的最小平均减速度为af。此等效加速度越大,跟车模式的激进程度越高。
2.2 驾驶状态识别算法
在提出驾驶状态数学描述和驾驶模式激进指数的基础上,驾驶行为的激进程度可由5个基本驾驶模式的激进指数复合值来衡量,即驾驶行为激进指数为
一段时间T内驾驶状态的综合激进程度可由该时间内发生的所有行为的激进指数复合值来衡量,即驾驶状态激进指数为
式中:ES为驾驶状态激进指数;N为时间T内发生的驾驶行为次数。
驾驶状态激进指数是在驾驶模式激进指数的基础上得到的衡量驾驶状态激进程度的定量指标。基于此指标可将驾驶员在时间T内的驾驶划分成正常、较激进和激进3种状态,其阈值设置为 ES0和ES1,驾驶状态激进指数小于ES0,表明其驾驶稳健,属于正常驾驶;驾驶状态激进指数大于ES1,表明其驾驶鲁莽,属于激进驾驶;介于两者之间为较激进驾驶状态。时间参数T表示驾驶状态评价时间窗,本研究中时间窗T设置为3min。
综上,建立了激进驾驶状态识别算法框架,幂指数x,权重wi和阈值ES0、ES1等参数将通过实车实验数据确定。
3 实验设计
激进驾驶没有法规和学术上严格的量化界定,本文拟采用驾乘人员的主观感受来衡量,因此实验过程中通过主观评价法确定驾驶状态样本的属性(正常、较激进、激进)。实验设计如下。
实际道路实验中,选择北京的北清路、五环路和京郊道路。驾驶员根据道路交通环境适机进行各类操作,包含正常和激进驾驶行为,被试为5名具有丰富经验的驾驶员,人均约做30组实验,每组3min形成一个驾驶状态样本。为确定每个样本的属性,2名有经验驾驶员随车进行评价,评价者每隔3min对前3min的驾驶状态(正常、较激进、激进)进行评价和记录,之后驾驶员将自评,综合2名评价者的评价结果和驾驶员自评结果确定驾驶状态样本属性。2名评价者驾驶习惯良好,无交通事故记录,无任何交通处罚,其评价具有一定的客观性。图2所示为实验道路环境和实验用车。
实验车辆上安装加速度计和转向盘转角传感器等,通过Freescale单片机实时采集加速度等信息并发布至车载CAN总线网络,同时车上安装有前向摄像头和驾驶员面部摄像头记录现场视频。车载工控机通过CAN采集卡实时采集车辆的加速度、速度、转向盘转角、车道线偏距和前车距离等车辆状态和环境参数,数据采样频率10Hz,通过视频采集卡实时采集前方道路和驾驶员面部视频。图3所示为实验中的车辆状态数据采集装置和摄像头。
实验共采集145组有效驾驶状态样本,每个样本为3min驾驶数据,其中正常驾驶状态样本40组,较激进样本64组,激进样本41组,包含制动174次、加速160次、换线149次、转弯96次,随机分布于各样本中。
4 算法参数确定与算法验证
激进驾驶状态识别算法中幂指数x、权重wi、阈值ES0、ES1为待定参数,因此从实验采集的145组驾驶状态样本中随机抽取95组样本(学习样本)用于参数确定,剩余50组用于算法验证。
4.1 参数确定
幂指数x表征激进驾驶导致的外界刺激和驾乘人员对其主观感受之间的关系。对于确定的x,存在最优wi、ES0、ES1使95组学习样本检测精度达到最大。因此,使检测精度最大的x及其对应的wi、ES0、ES1即为算法的最优参数。检测精度为
式中:R为检测精度;N11、N22、N33分别指主观评价为正常、较激进、激进的样本也分别被算法识别为正常、较激进、激进的个数;主观评价为i等级而被算法误识别为j等级的各类样本个数用Nij(i≠j)来表示;N为学习样本总数。
对数据分析后发现,数据差异基本都满足要求,除去个别差距在5%,其余所有数据误差均在误差范围之内,因此,本程序中的风荷载计算模块是可靠的。
求解wi、ES0、ES1是一个性能指标非光滑的最优化问题,因此本文中选择定步长迭代法,即x以定步长逐渐变化,对特定的 x,参数 wi、ES0、ES1在一个初选区间内以定步长递增,以寻找出一个较小的最优解区间,在此区间以较小的步长再次寻优,重复上述步骤至检测精度变化量小于设定值。
图4为当幂指数x从1渐增至3时,驾驶状态识别精度变化曲线。当x为1.89~2.32时检测精度大于90%,此区间为优选区域。本研究选取x=2,此时满足最大检测精度对应的权重wi、阈值ES0、ES1为
其中,w1,w2,…,w5分别为制动、加速、跟车、换线、转弯驾驶模式激进指数的权重系数。该权重反映不同驾驶模式产生相同加速度对应的激进程度不同。如换线模式由于快速旋转转向盘,虽然加速度幅度较小但是波动快速,所以人的主观感受强烈,因此其权重系数较大。通过上述分析,当x=2时驾驶模式激进指数为

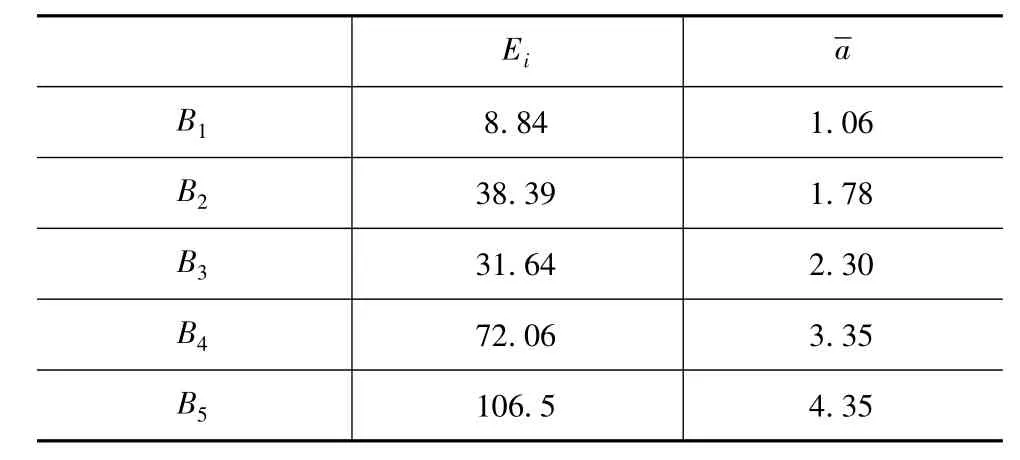
表1 不同强度制动的激进指数
4.2 算法验证
在建立驾驶状态识别算法并确定其参数后,利用剩余50组驾驶状态样本进行算法验证。将50组驾驶状态样本依次计算出各个驾驶模式、驾驶行为和驾驶状态的激进指数,基于驾驶状态激进指数利用已求的阈值ES0、ES1将驾驶状态划分为正常、较激进和激进3个等级,并与有经验驾驶员的评价结果对比得到算法检测精度。
图6为50组样本的驾驶状态激进指数值,其检测结果如表2所示,其中正常样本19个,不良样本16个,激进样本15个,正确检测46个,对验证样本库检测精度为92.0%。在实际运用中可增加训练样本,以使算法适应更大的驾驶员群体。
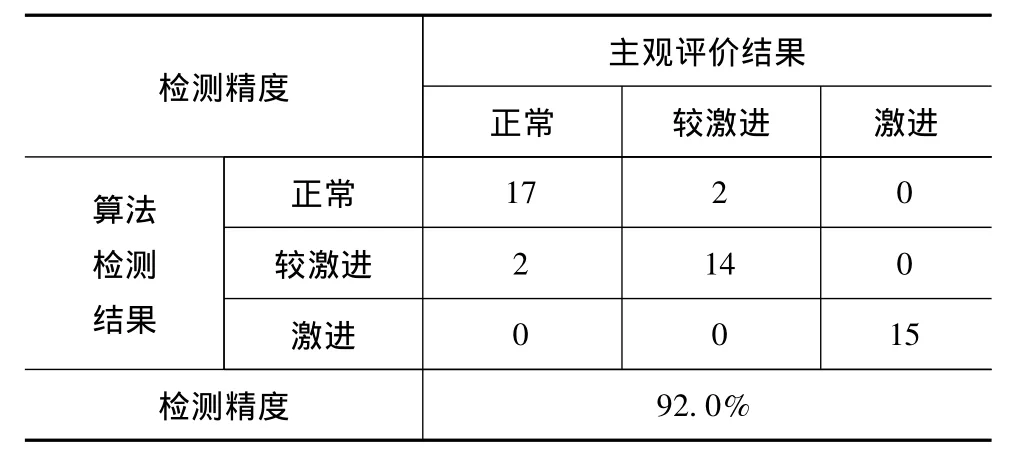
表2 算法验证结果
表3为验证样本中第27样本检测结果,其中制动4次,加速4次,换线5次,转弯2次,驾驶状态综合激进指数为218.7,大于阈值150,故判断为激进驾驶,与评价者的主观评价结果一致。

表3 第27样本驾驶状态识别结果
5 结论
(2)提出了基于加速度的驾驶模式激进程度评价指标——激进指数。基于此指标建立了驾驶模式-驾驶行为-驾驶状态3级评价方法,将激进驾驶状态的评价问题转化为基本驾驶模式的评价问题。
(3)通过实验完成算法参数的确定和算法验证,验证结果表明该算法能有效识别驾驶状态激进程度等级。
[1] Seay A,Zaloshnja E,Miller T,et al.The Economic Impact of Motor Vehicle Crashes,2000[R].Washington,DC:US Department of Transportation,National Highway Traffic Safety Administration,2002.
[2] Lajunen T,Parker D.Are Aggressive People Aggressive Drivers?A Study of the Relationship Between Self-reported General Aggressiveness,Driver Anger and Aggressive Driving[J].Accident Analysis& Prevention,2001,33(2):243 -255.
[3] Shinar D,Compton R.Aggressive Driving:an Observational Study of Driver,Vehicle,and Situational Variables[J].Accident Analysis& Prevention,2004,36(3):429 -437.
[4] Lynn P,Lockwood C R.The Accidental Liability of Company Car Drivers[R].Transport Research Laboratory,Report 317,1999.
[5] Ellison P A,Govern J M,Petri H L,et al.Anonymity and Aggressive Driving Behavior:A Field Study[J].Journal of Social Behavior& Personality,1995,10(1):265 -272.
[6] Krahé B,Fenske I.Predicting Aggressive Driving Behavior:The Role of Macho Personality,Age,and Power of Car[J].Aggressive Behavior,2002,28(1):21 -29.
[7] Shinar D.Aggressive Driving:the Contribution of the Drivers and the Situation[J].Transportation Research Part F:Traffic Psychology and Behaviour,1998,1(2):137 -160.
[8] Ellison-Potter P,Bell P,Deffenbacher J.The Effects of Trait Driving Anger,Anonymity,and Aggressive Stimuli on Aggressive Driving Behavior[J].Journal of Applied Social Psychology,2001,31(2):431-443.
[9] Dula C S,Geller E S.Risky,Aggressive,or Emotional Driving:Addressing the Need for Consistent Communication in Research[J].Journal of Safety Research,2003,34(5):559 -566.
[10] Lin Q,Feng R,Cheng B,et al.Analysis of Causes of Rear-end Conflicts Using Naturalistic Driving Data Collected by Video Drive Recorders[C].SAE Paper 2008-01-0522.
