矩形隧道掘进模拟机的研究与开发
2014-09-20
上海市机械施工集团有限公司 上海 200072
1 概述
矩形隧道与传统圆形隧道相比,能充分利用结构断面,减少地下掘进面积,不仅节约资源,降低造价,而且有利于对既有建筑、管线的保护,减少施工对环境影响,是一项“资源节约、环境友好”的新技术、新工艺[1],目前已在上海城市建筑密集、交通流量较大的地区地下人行通道等施工中得到越来越多的应用。
随着矩形隧道应用的发展,施工企业技术培训、专科院校施工教学都提出了培养矩形隧道施工技术人员、矩形隧道掘进机操作人员的要求。这是一门实践性很强的课程,单纯依靠教材上的文字、图纸、照片难以形象直观地进行教学表达,也不能培养学员的实际动手能力。考虑到矩形隧道掘进机造价昂贵,以及施工安全等问题,又不宜以真实的掘进机在真实的施工环境中对学员进行教学、培训和训练。因此亟需发明一种以计算机仿真、三维动画等高新技术实现的、能够比较形象地演示施工情况、供学员操作的矩形隧道掘进模拟机(以下简称模拟机),以达到或接近真实的矩形隧道掘进机(以下简称真实机)的施工效果,提高教学、培训的水平和质量。
本文阐述模拟机的原理、构成和功能,介绍其研究开发中的关键技术。
2 模拟机的原理和构成
真实机由控制系统和机械系统构成,控制系统操控机械系统,对施工对象(地下土体等)进行掘进施工,机械系统通过传感检测电路,将自身的状态和施工对象的状态反馈给控制系统。
模拟机由控制系统、虚拟处理系统和仿真显示系统构成,虚拟处理系统根据控制系统的指令,通过虚拟运算,进行掘进机物理仿真,一方面驱动仿真显示系统,以三维动画演绎掘进机施工,另一方面模仿掘进机和施工对象,向控制系统反馈施工状态[2]。因此虚拟处理系统和仿真显示系统共同担当真实机的机械系统和施工对象的作用。
模拟机的控制系统与真实机的控制系统,在基本原理、设备外形、操作界面上完全一致,使操作者使用时无异于真实机。在内部电路、输入输出接口上与真实机有所区别,因为其驱动的是计算机仿真模型,而非真实的机械系统;其接收的反馈信息是计算机模拟的,而非来自真实的掘进机和施工对象。
模拟机的虚拟处理系统和仿真显示系统都有人机界面。虚拟处理系统的人机界面供教师使用,可以设置、修改模拟机的各种性能、参数、模式,可以对操作者进行考核、评分[3]。仿真显示系统的人机界面用于镜头、视图等交互操作,使用者可以全方位、多视角地观看,可以实现透视、隐蔽等各种特殊视觉效果,还可以回放历史数据。虚拟处理系统和仿真显示系统分别安装在PC计算机上运行,与控制系统主机(PLC)以数据通讯线连接。
3 模拟机的控制系统
模拟机控制系统的操作界面与真实机的完全相同,包括控制台操作板、控制台内开关和触摸屏界面,操作方法和真实机相同。
3.1 控制台操作板
控制台操作板是模拟机的主要操作界面,其控件包括:系统控件:控制电源开关、联络按钮、变频器复位按钮、警报停止按钮、紧急停止按钮;刀盘控件:刀盘运转开关、刀盘转速旋钮;左、右螺旋机控件:螺旋机运转开关、螺旋机正转指示灯、螺旋机反转按钮(带指示灯)、螺旋机转速旋钮、出土闸门开关;纠偏控件:总阀门开关、左阀门开关、右阀门开关、注泥泵开关;后顶控件:后顶启停开关、后顶方式设置按钮、后顶油缸伸出按钮、后顶油缸缩进按钮、后顶速度设置旋钮;其他控件:气密泵开关、注浆泵开关、排土泵开关。
3.2 控制台内开关
在控制台操作板的下方箱体里,安装有掘进机的连锁开关,用于确定各主要部件动作的时序连锁,主要有:“排土泵→螺旋机”连锁开关、“排土泵→刀盘”连锁开关、“刀盘→螺旋机”连锁开关、“后推进→螺旋机”连锁开关、“侧滚角度→刀盘”连锁开关、“刀盘→后推进”连锁开关、“给脂间断→连续”设置开关等。
3.3 触摸屏界面
控制台上有两个触摸屏,也是模拟机的主要操作界面,包括:掘进控制、运行监控、纠偏操作、泵站启停、系统设置、模拟数据、异常报警,以及后顶推进操作等十多个画面。
4 模拟机的虚拟处理系统
模拟机的虚拟处理系统安装在PC计算机上运行。它接收控制系统的指令,按虚拟运算规则进行掘进机物理仿真,将模拟的动作、状态信息传送给仿真显示系统,驱动掘进机仿真模型和施工环境仿真模型,演绎掘进施工,同时将模拟的状态信息反馈给控制系统,形成一个完整的控制回路。
虚拟处理系统的主要功能有:数据通讯、物理仿真、事件模拟、运行监视、作业管理、系统管理等六类。
4.1 数据通讯
虚拟处理系统以串口通讯协议与控制台PLC连接,以以太网通讯协议与仿真显示系统连接。通讯是自动、强制进行的,在通讯失稳时能自动重试接续,并将出错信息写入日志文件备查。
4.2 物理仿真
掘进机物理仿真的内容主要为动作仿真和状态仿真。动作仿真要模拟掘进机各项动作的形式、方向、行程、时间、速度、轨迹等,状态仿真要模拟掘进机和施工对象的几何形态、体积、容积等变化,还要模拟压力、转矩等物理量及其变化。
仿真算法要解决时间效应问题,例如:为弥补通讯延迟,需要对运动采样进行流畅、平滑处理,为模拟运动阻力、惯性,需要对模拟机的响应做延时、迟滞处理,等等。
4.3 事件模拟
操作者可以通过“偏差模拟器”、“事件模拟器”,产生模拟的偏差、故障,满足教学、实习需要。各种模拟的触发、波动机制有如下几种:
(a) 手动触发、波动;
(b) 定点触发、波动;
(c) 定时或周期性触发、波动;
(d)函数触发、波动,模拟外界扰动的发生、变化。
4.4 运行监视
模拟机运行监视窗口有:系统状况、刀盘切削、螺旋排土、后顶推进、铰接和其它等5 个。
4.5 作业管理
一位操作者的一次上机操作称为一次作业。作业启动时登记作业的名称、类别、内容、操作者、指导教师等信息[4]。作业启动后,系统就自动记录本次作业的所有操作指令、运行数据,按规定格式存入数据库,记录的数据可以查询,可以回放,以重现操作者的上机过程和情况。作业终止时结束数据记录。作业终止后还可以恢复,自刚才终止处继续记录下去。也可以重启,重启时该作业之前的记录全部废除,重新开始记录。作业管理功能记录的作业数据,也是一份完整的模拟机教学、上机档案。
4.6 系统管理
系统管理功能包括:基础信息维护、系统参数的导出与导入,以及数据库的备份与恢复等。
5 模拟机的仿真显示系统
模拟机的仿真显示系统需要安装在高性能图形处理计算机上,通过以太网与虚拟处理系统连接。可以同时连接多台仿真显示系统,实现多终端异地应用。
仿真显示系统的核心是掘进机仿真模型、施工环境仿真模型,以及仿真模型驱动程序。仿真显示系统的人机界面提供齐全的三维交互功能,使模拟机可以更好地用于技术培训和教学实训。
5.1 掘进机仿真模型
掘进机仿真模型以上海机械施工集团研发的TH691PMX-1矩形隧道掘进机为蓝本建立,其主要构成如下:
(a)掘进机机身。是掘进机的外壳,又称盾壳,壳内安装了掘进机的主要机构和装置。机身分为前中后3 段,前段的外端面装置有组合刀盘和周边刀,中段分为前后镶嵌铰接的2 部分,通过铰接油缸的不同伸缩,改变前后部分的铰接角度,可以使机身上下左右微转,从而微调掘进机前进姿态,纠正掘进轴线偏差。铰接处采用充气橡胶密封。
(b)刀盘切削系统(图1)。包括6 套组合刀盘(每套有1 台变频器、3 台电机以及若干刀具)。刀盘切削系统的运行原理是:由控制系统控制变频器驱动刀盘电机转动,通过减速齿轮箱带动刀盘旋转,以刀盘旋转来切削前方土体,达到向前掘进并支撑开挖面土体的目的。6 套刀盘既可以正转,也可以反转,可以联动,也可单独转动。

图1 掘进机机身和刀盘切削系统的仿真模型
(c)螺旋排土系统。又称土压平衡系统,包括2 套螺旋机、2 台泵站、2 套出土闸门、4 个土压传感器、1 套排土泵等。螺旋排土系统的运行原理是:由控制系统驱动油马达,带动螺旋机转动,以螺旋机旋转来抽出刀盘切削下来的渣土,再由排土泵将渣土排出到集土坑内;通过改变螺旋机转速控制排土量,可以调节土压力。
(d)铰接纠偏系统。包括盾壳铰接处上、下、左、右4 组液压铰接油缸、2 台泵站、1 台倾斜仪。铰接纠偏系统的运行原理是:由控制系统驱动液压铰接油缸,带动机头上下左右转动,微调掘进机前进方向,从而纠正掘进轴线偏差。
(e)注泥纠侧、注脂密封、注浆减摩、气压密封等系统。注泥系统以注泥压力影响掘进机左侧或右侧升降,纠正机身的侧转。注脂密封系统将润滑油脂打到刀盘唇口密封处和螺旋机唇口密封处,阻挡机外泥土进入机内。气压密封系统将空气压力打入机身铰接处的内、外周密封气囊,阻挡机外泥土进入机内。注浆减摩系统将泥浆注出于掘进机机身的外表面,用于减小掘进的摩阻力(图2)。
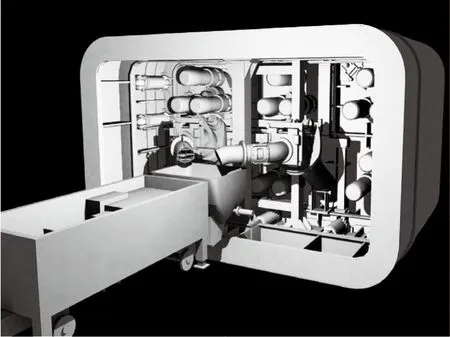
图2 螺旋排土系统的仿真模型
(f )后顶推进系统。固定设置在始发井的最后面,由顶推油缸、U形顶铁、发射架、钢后靠等部分组成。后顶推进系统的运行原理是:由控制系统驱动顶推油缸伸缩,将管节和机头向前推进;通过改变后顶推进速度改变土仓出土量,可以调节掘进面土压力,实现土压平衡(图3)。
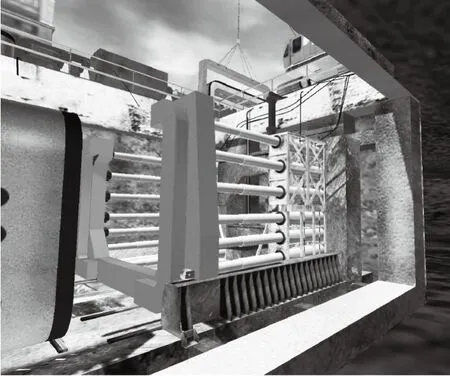
图3 后顶推进系统的仿真模型
(g)管节吊装系统:包括起重机、吊索、铁扁担等。管节吊装系统不是掘进机本身的组成部分,而是为它服务的施工机械。实际施工中,管节吊装是由起重机司机操作,将管节从地面上吊到始发井下,就位于先前已安装顶进的管节和后顶推进系统之间。为完整表现矩形隧道施工过程,模拟机配置了管节吊装系统。
5.2 施工环境仿真模型
模拟机的施工环境仿真模型有5 项:矩形隧道掘进机车间、矩形隧道施工工地、矩形隧道始发井、掘进土体及已掘进的隧道、矩形隧道接收井(图4、图5)。

图4 矩形隧道施工的工地鸟瞰
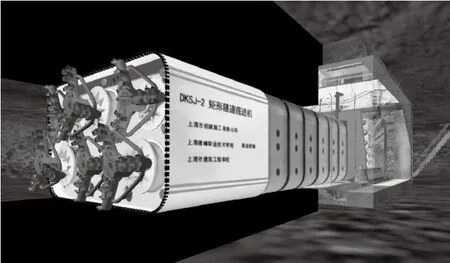
图5 矩形隧道掘进的地下施工场景
5.3 仿真显示系统的人机界面
仿真显示系统可以供用户操控的功能主要有:
(a)模式设置。监视模式:仿真显示系统作为掘进机的监视器,保持与虚拟处理系统的通讯,接收其发来的数据,显示掘进机实时的施工画面和有关信息。
回放模式:仿真显示系统作为历史数据的回放器,用户可以通过回放管理器播放以前的作业情景。回放的历史数据可以来自模拟机数据库,也可以来自显示终端本机的数据库(从模拟机数据库下载到本地)。
(b)各种窗口的开关。仿真显示系统具有许多弹出窗口(图6),其中用作系统状态或作业信息提示的有:①系统状态板、②作业信息板、③数字仪表板;用作仿真互动的有:④镜头定位板、⑤3D显示效果设置板;用作功能操控的有:⑥回放管理器、⑦镜头巡视器等。这些窗口可以随意打开、关闭、拖动。

图6 仿真显示系统的部分弹出窗口
(c) 仿真交互功能。用户通过仿真交互功能,可以进行三维场景切换、镜头操作、视图制作和选用、3D效果设置等,满足各种使用需要。
(d)自动巡视:按事先规定的轨迹,自动地移动镜头,变换镜头的视距、视角,连续地展示三维仿真场景的各个部位,就像播放录像一样。
(e)作业回放管理:选择回放的对象、范围、速度、方式,进行播放、暂停、快进、快倒、停止等操作。
(f)系统设置、维护:包括运行性能设置、管理权限的设置、数据的导出与导入等。
6 模拟机的使用功能
6.1 学习掘进机的机械结构、原理
教师通过图示掘进机的机构、部件,介绍掘进机的机械结构、原理。可以使用镜头操控、视图切换等功能,以及隐藏、单显、剖视、透明等特殊手段,实现最佳教学效果。
6.2 学习掘进机的操作方法
学员可以在控制台上操作模拟机,学习掘进机的操作。学习内容主要如下:
(a)总体控制:掘进机启动、停止,各类泵启动、停止,紧急停止等。
(b)刀盘系统:刀盘启停、变速、变向,观察刀盘扭矩等。
(c)螺旋机和出土闸门:螺旋机启停、变速、变向,出土闸门开大、关小,观察土压力变化、螺旋机压力等。
(d)铰接纠偏系统:铰接油缸全伸、全缩,机头上转、下转、左转、右转,观察铰接油缸的伸出长度、掘进轴线偏差、机身倾斜角度的变化等。
(e)注泥纠侧系统:注泥泵启停,注泥总阀、左阀、右阀的开大和关小,观察注泥压力、机身侧转角的变化等。
(f)注脂密封、注浆减摩、气压密封等系统:观察各相关数值的变化。
(g)后顶推进系统:后顶油缸的选择,后顶油缸伸出、缩进:观察后顶压力、推进距离等。
(h)管节安装:掘进模式与管节安装模式的切换,启动、观察管节吊装过程,操作后顶油缸推进、拼装管节,观察管节安装环数等。
6.3 学习掘进施工的工艺流程
模拟机模拟的施工流程或操作流程有如下几种:
(a)掘进机出洞(顶出始发井)进入土体;
(b)掘进机在土体内掘进施工;
(c)管节吊装和拼装;
(d)掘进机完成掘进后进洞(进入接收井)。
6.4 学习掘进中的施工控制
教师可以在虚拟处理系统上设置各类参数、偏差、事件等,既可以通过控制台上的实际操作,讲解掘进中施工控制知识,也可以让学员上机操作,熟悉、掌握各项施工控制方法。
掘进中的施工控制主要内容有:土压平衡的控制、掘进轴线偏差的纠正、机身侧滚的纠正、施工中有关偏差的纠正、施工中设备故障的检查与排除、施工中设备过载的诊断与排除等。
