地下隧道掘进机仿真系统的研究及其在教学培训中的应用
2014-09-20王云飞张永辉
王云飞 许 勇 张永辉
1. 上海市机械施工集团有限公司 上海 200072;2. 上海市建筑工程学校 上海 200241
1 概述
随着社会经济和城市建设的快速发展,城市地下空间开发的施工任务日益繁重,其中大量的是地下隧道、通道的非开挖施工,包括城市地铁隧道的盾构法施工、城市地下立交的矩形通道施工等,地下隧道掘进机的使用越来越广泛,因此迫切需要加强地下隧道掘进机施工技术、安全知识和操作技能的教育培训,包括中高等院校地下施工专业的教学实训、企业新进员工的培训和已有员工的再培训[1-3]。
地下隧道掘进机技术培训特别是操作技能的培训,是一门实践性很强的课程,只通过文字教材、图纸、照片等进行教学表达是不够的,还需要直观演示和上机训练。考虑到隧道掘进机造价昂贵、任务繁忙,以及施工安全,不宜以真实的机器在真实的施工环境中对学员进行教学、培训。因此需要发明一种采用计算机虚拟现实和图形仿真技术的教学系统,以形象地演示地下隧道掘进施工,让学员能够像操作真机器一样进行操作训练,其教学效果可以达到或接近真实的隧道掘进机,以提高目前地下空间施工技术、机械掌控技术的教学培训水平。目前,国内外尚未见基于计算机仿真的隧道掘进机教学系统的报道和案例,需要进行开拓性的研究和创新。为此,上海市机械施工有限公司联合上海市建筑工程学校、上海建峰职业技术学院、威英软件(上海)有限公司等单位,联合研发了地下隧道掘进机仿真系统,并已投入教学应用。本文简介了该系统,以及其研究成果和应用情况。
2 基本原理
仿真机的控制系统与真实机的控制系统,在基本原理、设备外形、操作界面上基本一致,使操作者使用时无异于真实机。但在内部电路、输入输出接口上与真实机有所区别,因为其驱动的是模型系统,而非真实的机械系统;其接收的反馈信息是模型系统的,而非来自真实的掘进机和施工对象。控制系统还需要增加一些真实机所没有的辅助功能,用于仿真支持和教学培训的需要,例如对现场包括主机、辅助设备、辅助设施的一体化控制、对隧道管片虚拟拼装的顺序控制等。
仿真机的机械模型,可以是基本结构与真实机相似的实体模型,也可以是计算机数字模型[4]。采用实体模型的,由于环境、成本、实施条件的限制,可以简化、省略部分机构或装置,即使不简化、不省略的机构或装置,有的动作或功能也不能实际运行,例如排土、注浆等,因此还有不少机构、装置、动作、功能要由计算机数字模型来仿真,也就是说需要数字模型配合弥补。
仿真机的对象模型,则应由计算机数字模型来构建,通过仿真运算,对控制系统发出的掘进机动作指令做出响应,将运算得出的状态信息和数量信息反馈给控制系统。
3 技术方案
仿真系统按其机械模型和对象模型的类别可以分为组合仿真和全仿真2 种。组合仿真是机械模型采用实体模型,对象模型采用数字模型;全仿真是机械模型和对象模型都采用数字模型。
这2 种仿真各有特点和长处,前者可以进行机械、液压、电气等硬件知识以及设备的安装、调试、维护技术的教学,但制造、维护成本较高,后者成本较低,但教学的直接性、形象性不如前者,而且由于是全仿真,研发难度要大得多。
为了比较全面地发展隧道掘进机械的仿真科学技术,并满足教学培训的多种需要,本课题同时研究组合仿真和全仿真这2 种技术,并形成如下技术路线。
(a)仿真机由控制系统和模型系统(包括机械模型、对象模型)组成。模型系统可以是实体模型和数字模型组合,也可以是全数字模型。
(b)控制系统采用与真实机一致的PLC技术[5]。控制系统的作用与真实机基本一致,但控制范围更大,不仅控制主机,还要控制所有其他辅助设备、辅助设施,实施一体化的安全管制,例如各运动机构的边界限位、紧急情况下的全场急停等。控制系统除了具备真实机功能外,还根据教学需要增设一些辅助功能,例如掘进机、管片拼装机等运动设备的初始化定位、管片拼装的控制等。
(c)实体模型模仿真实机按比例缩小设计制作,盾壳直径宜为2 m左右,以适合在室内安装运行。实体模型应具有真实机的主要设备和装置,其中部分比较复杂且教学作用较小的可以简化或省略,交由计算机仿真实现。
(d)数字模型模仿真实机按比例设计构建,结构的细分按需要单独展示、单独动作的最小单位来确定。数字模型的仿真包括动态仿真和图形仿真。动态仿真的效果应与真实机、真实对象近似。图形仿真的逼真程度按教学需要和成本控制的综合平衡原则确定。
(e)数字模型的运行载体和引擎软件称为虚拟系统。对于组合仿真,虚拟系统的作用,一是对实体机械模型的弥补,二是担任对象模型;对于全仿真,虚拟系统的作用,一是担任机械模型,二是担任对象模型。
(f)虚拟系统由虚拟处理器和图形仿真器组成。虚拟处理器是虚拟系统的心脏,以动态仿真为主,图形仿真器是虚拟系统的构架,提供掘进机和施工对象的视觉形象,以图形仿真为主。
虚拟处理器根据控制系统的指令,通过虚拟运算进行动态仿真,模仿掘进机和施工对象,一方面将动态信息传输给图形仿真器,一方面将反馈信息传输给控制系统。
图形仿真器由图形仿真模型和图形仿真引擎组成。图形仿真引擎接收虚拟处理器的动态仿真数据,转化为图形仿真指令,驱动仿真模型产生位置变化、尺寸变化、形态变化,从而形成与模仿对象一致或接近的四维实时动画。
(g)虚拟处理器和图形仿真器均采用PC计算机。控制系统与虚拟处理器的通讯方式为RS232串口通讯,虚拟处理器与图形仿真器通讯方式为基于Ethernet的TCP/IP协议。一台虚拟处理器可以连接多台图形仿真器,实现多终端远程异地应用。
(h)图形仿真器除了实时响应虚拟处理器以外,还可以脱离虚拟处理器。一是回放历史数据,重现以往过程。二是自行简单的动作仿真,使屏幕上的掘进机无需虚拟处理器也可以演绎基本动作和功能。因此,图形仿真器可以单独在台式或便携式计算机上使用,以方便课堂讲学、异地应用。
(i)地下隧道掘进机械包括盾构机、顶管机2 类,因此以目前城市地下空间开发中应用较多的土压平衡盾构机和矩形隧道掘进机(或顶管机)为研究和仿真对象,研发盾构机仿真系统和顶管机仿真系统。
4 总体结构
研究设计了2 种掘进机仿真系统总体结构。
第一种是实体模型和数字模型组合仿真机,由控制系统、实体模型、虚拟处理器和图形仿真器组成。以城市地铁隧道建造中常用的土压平衡盾构机为原型研发。
第二种是数字模型全仿真机,由控制系统、虚拟处理器和图形仿真器组成,以城市地下立交通道建造的新型设备矩形隧道掘进机为原型研发。
组合仿真机的控制系统包括控制台,以及实体模型的电气控制柜、液电驱动电路、传感器及传输电路、电源装置等组成。全仿真机由于没有实体模型,因此控制系统只含控制台。
控制台主机采用OMRON-PLC可编程控制器,实体模型的液压、电气控制也采用PLC可编程控制器。控制台PLC与实体模型PLC之间以ControllerLink通讯连接。
虚拟处理器采用PC计算机,图形仿真器采用PC图形工作站。虚拟处理器和图形仿真器的编程语言采用Visual C++2008 .NET Framework 2.0。
控制系统与虚拟处理器以RS232串口通讯连接。虚拟处理器与图形仿真器以Ethernet网线连接。一台虚拟处理器可以连接多台图形仿真器,实现多终端远程异地应用。图形仿真器可以脱离虚拟处理器独立运行,用于历史过程数据的回放、重现,以及掘进机基本动作和功能的操作演示,便于课堂讲学、移动展览等。
5 研究成果和应用情况
在上述研究的基础上,创新研制了DKSJ-1土压平衡盾构教练机和DKSJ-2矩形隧道掘进模拟机,已经安装在上海市建筑工程学校的地下空间施工技术实训室内,用于中高等职业教育的地下隧道建造技术课程的教学、实训(图1、图2)。
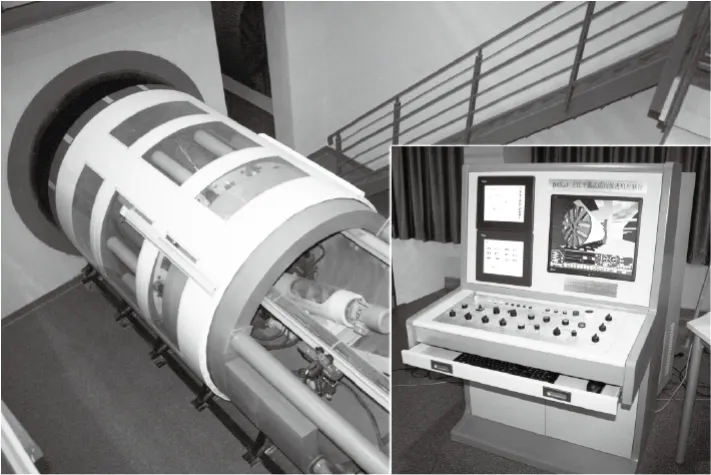
图1 DKSJ-1土压平衡盾构教练机
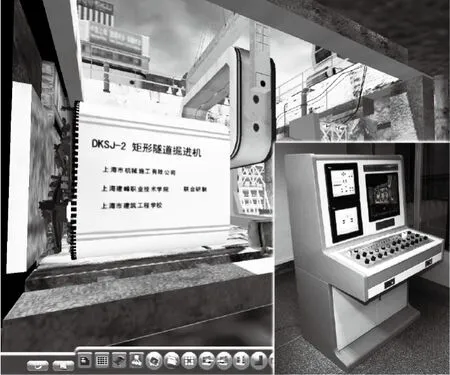
图2 DKSJ-2矩形隧道掘进模拟机
5.1 DKSJ-1土压平衡盾构教练机的实施情况
DKSJ-1是由实体模型和数字模型组合仿真的,实体模型按真实机的3∶1比例制作,需要一定的安装空间,因此在该校地下空间施工技术实训室设置的土压平衡盾构实训区,为占地6 m×12 m的二层区域。
以该区域的二楼模拟盾构施工的地面层,一楼模拟盾构施工的地下层。在地面层开设一个5 m×5.2 m的矩形孔作为模拟的盾构施工工作井,井口边设有自二楼到一楼的铁制扶梯。
在工作井内,布置模拟的盾构机出洞洞门、盾构机发射架和地铁车站平台。盾构机发射架上依次设有实体模型的主机、管片,地铁车站平台上设有反力架、后续台车和运输小车。控制系统的井下控制柜布置在后续台车内。
控制台和虚拟系统布置在工作井上方旁边。在该区域设置了大屏幕投影仪,放置了数十个座椅,可供教学讲课、参观观摩等。
5.2 DKSJ-2矩形隧道掘进模拟机实施情况
DKSJ-2矩形隧道掘进模拟机是全数字模型仿真的,只有控制台和显示屏幕,可以安装在一般教室里,因此在该校地下空间施工技术实训室设置了6 m×9 m的矩形隧道掘进机实训区,与土压平衡盾构实训区的井上部分相邻。
在实训区布置了控制台、教师台、大屏幕投影仪等设备。教师台上并排着虚拟处理器和图形仿真器。控制台的图形仿真器与教师台的图形仿真器连接在虚拟处理器的路由器上,大屏幕投影仪与教师台的图形仿真器以VGA共享器连接。实训区后半部的开发式区域可以放四五十张座椅,可以进行班级授课,举行小型技术讲座、技术交流等活动。
5.3 应用情况
DKSJ-1、DKSJ-2的教学内容包括应知、应会2 部分。
应知教学是通过这些设备的计算机仿真功能,讲解、展示隧道掘进机的各部分构造和机电原理,演绎地下隧道掘进施工的工艺流程和控制知识,帮助学生学习地下隧道掘进机的机械构造、动力装置和控制系统,形象地了解掘进机的功能性能、作业流程、施工工艺。应会部分是教师上机示范指导,学生上机操作练习,学习掘进机的机电安装、施工操作、纠偏控制、故障处理等,培养学生的操作技能,增强学生的动手能力。
这些设备技术先进,性能优良,投入应用以来运行稳定、状况良好,对于培养知识扎实、动手能力强的地下隧道建造和隧道掘进机操作人员发挥了较大作用。这些设备还经常用于地下隧道掘进技术知识的交流演示、教育课程的示范演示等(图3)。

图3 教师在讲解土压平衡盾构机结构原理
