竞技武术套路B 级“抛+接”类高难度动作445+8的运动学分析
2014-07-24张峰枫陈玉静
刘 健,张峰枫,陈玉静
(1.鲁东大学体育学院,山东 烟台 264025;2.潍坊护理职业学院,山东 潍坊 261041;3.青岛理工大学临沂校区,山东 临沂 276000)
竞技武术套路B 级“抛+接”类高难度动作445+8的运动学分析
刘 健1,张峰枫2,陈玉静3
(1.鲁东大学体育学院,山东 烟台 264025;2.潍坊护理职业学院,山东 潍坊 261041;3.青岛理工大学临沂校区,山东 临沂 276000)
运用运动生物力学的三维摄像解析法,获得比赛现场武术套路运动员完成445+8高难度动作技术的生物力学参数。并对成功完成的技术动作和失败的技术动作进行对比,分析之间存在的差异,找出导致失败动作的主要原因。
竞技武术套路;器械抛+接;445+8;动作特征;运动生物力学
在大型武术比赛中不能顺利完成竞技武术套路B级“抛+接”类高难度动作,已成为困扰教练员和运动员的一大心理障碍。目前,如何才能够高质量完成这类高难度动作,已成为当今武术科研中一个亟待解决的问题。因此,对445+8技术动作进行生物力学分析显得尤为重要。通过生物力学手段对445+8动作进行分析,探究其动作特征与运动规律,旨在为广大教练员和运动员掌握该技术动作特点,提高成功率,进行科学训练提供有力的理论支持。
1 研究对象与方法
1.1 研究对象
竞赛套路445+8高难度动作。
1.2 研究方法
1.2.1 三维影像分析法
拍摄现场:第11届全运会武术套路比赛预赛(时间:2009年4月22—24日;地点:上海国际体操中心)、决赛(时间:2009年10月12—14日;地点:山东省滨州市奥体公园体育馆)。现场用2台日本产JVC9800型号的摄像机拍摄了运动员完成445+8动作的全过程。
拍摄过程:摆放摄像机,使2台摄像机与受试者活动中心区域的连线夹角为90(符合拍摄夹角大于60小于120的拍摄要求)。拍摄前调节好摄像机的拍摄模式,拍摄频率为25帧,拍摄速度为50场/s,机身高度约为1.5m,拍摄距离大约为10m。先将预先支好的三维辐射框架摆于实验对象的大致活动区域,然后对框架进行30秒左右的拍摄,拍摄完毕后撤掉框架,再对每个实验对象所要完成的动作进行多次重复拍摄。试验现场如图1所示。
录像解析过程:利用德国SIMI0motion7.3录像解析系统进行逐帧解析,采用汉纳范(Hananvan)人体模型:6个环(关)节点,使用DLT法计算得到解析点的三维空间坐标,据运动生物力学的相关-理对运动员的技术动作进行分析与评价[1-2]。
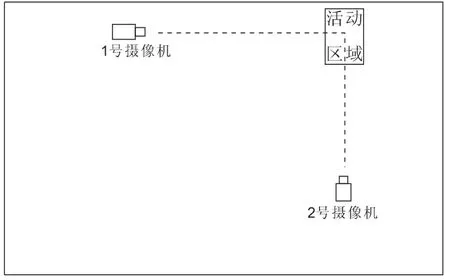
图1 试验现场示意图
1.2.2 数理统计法
运用SPSSv16.0软件对所测数据进行独立样本T检验。
2 研究结果与分析
445+8(抛+抢背+接)难度等级B级,难度动作衔接分值为0.1分[3]。技术动作由抛器械、抢背、抓接器械3个步骤组成,抛器械时左脚在前右脚在后,抢背(前滚翻)完成后抓接器械时,右脚在前左脚在后。本文按其运动规律对动作的抛器械阶段、器械空中阶段、抓接器械阶段3个阶段进行分析。
2.1 抛器械阶段动作技术分析
抛器械动作阶段是指从助抛开始到器械脱手止。器械出手动作很重要,由于器械出手的同时运动员需要做“抢背”动作,所以器械出手后的高度、速度、角度对完成后续动作至关重要。它关系到器械在空中飞行的方向,空中弧线的高低大小,运行的距离以及器械的翻转度数。因此,我们对长、短器械中成功与失败的各5名运动员在完成上抛动作时,器械出手后的高度、角度、速度和两膝角度的变化情况进行对比分析(表1-表2)。出手角度的界定:器械、手、手腕以手为定点,手臂水平前举与器械成一直线为180°,器械垂直向上为90°。两膝的角度是以髋关节、膝关节、踝关节以膝关节为定点。
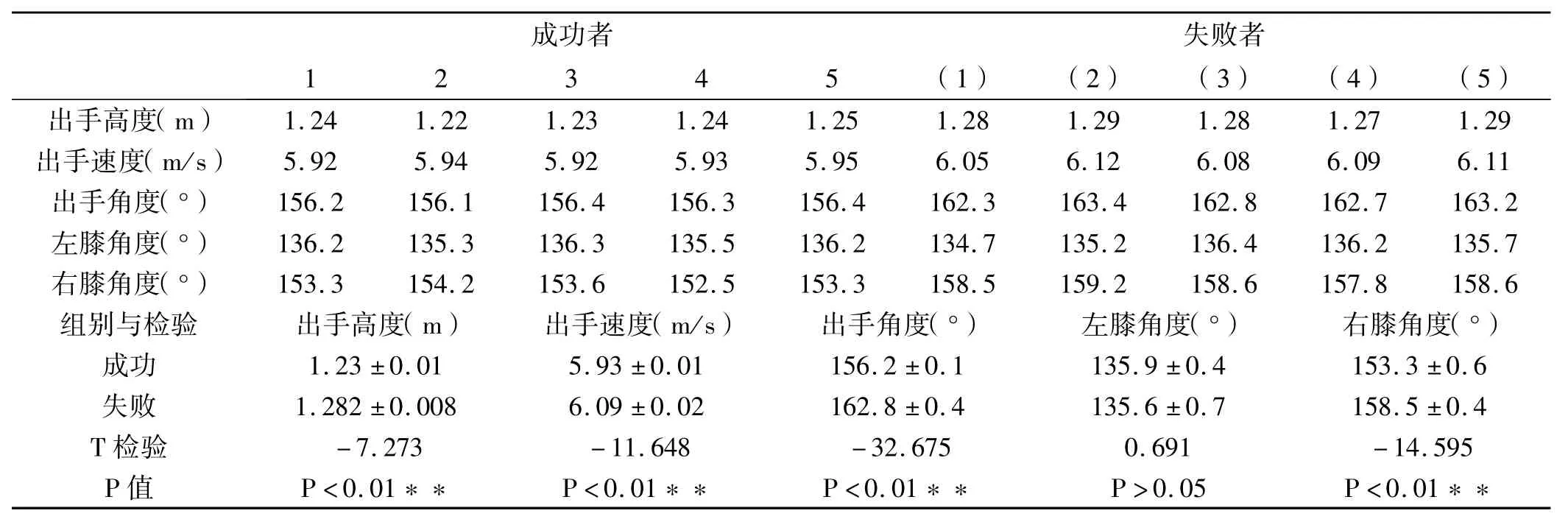
表1 短器械上抛时运动员出手高度、速度、角度,两膝角度变化对比分析
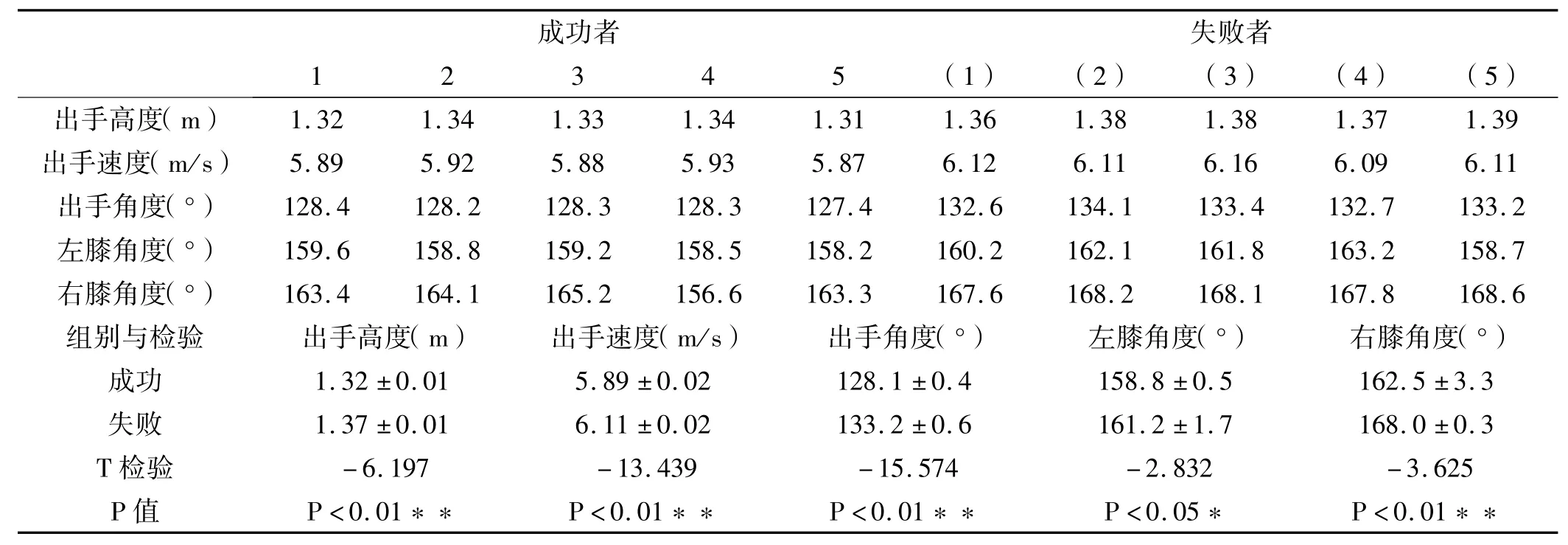
表2 长器械弧线前抛时运动员出手高度、速度、角度,两膝角度变化对比分析
通过表1-表2可以看出,成功者不管是短器械还是长器械在出手的高度上均低于失败者,P〈0.01,差异性达到非常显著水平。出手高度过高或过低均不利于后续动作的完成,过低导致器械在空中飞行的高度过低不利于完成身体难度动作,过高运动员完成身体动作时会出现等待接器械的现象,不利于动作衔接影响整体节奏。短器械出手高度应控制在1.23m左右,长器械出手高度应控制在1.32m左右较为合适。
出手的速度和角度是完成器械抛接类高难度动作的关键环节,出手速度和角度影响着器械在空中飞行的速度、抛物线的大小和飞行距离,出手速度过快容易导致器械在空中的飞行速度快于人体滚翻时的位移速度,慢则反之,使人械在时空上不能同步。出手的角度决定着器械在空中的运行轨迹,角度越大器械在空中的抛物线越长,器械前冲速度越快,飞行距离越远,落点较远。角度过小则抛物线短,器械前冲力小,器械空中飞行距离就短,器械翻转速度过快,落点较近。器械飞行距离过远会导致运动员在完成前滚翻后器械远离人体不利于抓接器械,落点较近运动员完成前滚翻时,器械会落于运动员身后。成功者运动员的短器械出手速度为5.93±0.01m/s,失败者为6.09±0.02m/s,P〈0.01。长器械为5.89±0.02m/s,失败者为6.11± 0.02m/s,P〈0.01。成功者短器械出手角度为156.2 ±0.1°,失败者为162.8±0.4°,P〈0.01。长器械为128.1±0.4°,失败者为133.2±0.6°,P〈0.01。从所测数据来看失败者的出手速度明显快于成功者,出手角度也大于成功者,差异性达到非常显著水平。
两膝角度决定着人体身体重心的高低,运动员在抛出器械后要迅速向前在地上做一个前滚翻动作,此时人体重心过高不利于运动员迅速前翻,滚翻前后脚要积极向前蹬伸增加滚翻初速度。从所测数据分析,成功者的人体重心略低于失败者,成功者短器械左膝角度为135.9±0.4°,失败者为135.6±0.7°,P〉0.05,两者之间没有显著差异。成功者右膝角度为153.3±0.6°,失败者为158.5±0.4°,P〈0.01,差异性达到非常显著水平。成功者长器械左膝角度为158.8 ±0.5°,失败者为161.2±1.7°,P〈0.05,两者之间差异性显著。成功者右膝角度为162.5±3.3°,失败者为168.0±0.3°,P〈0.01,两者之间差异性达到非常显著水平。通过右膝的数据可以看出失败者后(右)腿膝关节角度过大,腿伸展较直,在做前滚翻时不能充分利用后脚发力做向前的蹬伸动作。
2.2 器械空中飞行阶段动作技术分析
器械抛离出手到抓接器械动作之间,为器械的空中飞行阶段。由于器械种类、抛、接方式的不同,抛出后器械在空中飞行的形态也不同。短器械刀、剑,在空中飞行的形态为垂直状态,剑或刀的尖部朝上把端朝下,长器械则在抛出后器械的顶端领先在空中翻转180°或360°,下落时抓接器械的顶端或把端。器械上抛脱手后,要求人体和器械的运动在时、空上要协调准确配合。既不能使器械运行先于身体完成动作,也不能使身体动作过于超前于器械,否则将造成失败[4]。因此,我们对运动员在完成动作时,器械在空中飞行的最高高度、飞行速度、位移距离和人体位移距离及人械水平速度差的变化情况进行对比分析(表3-表4)。
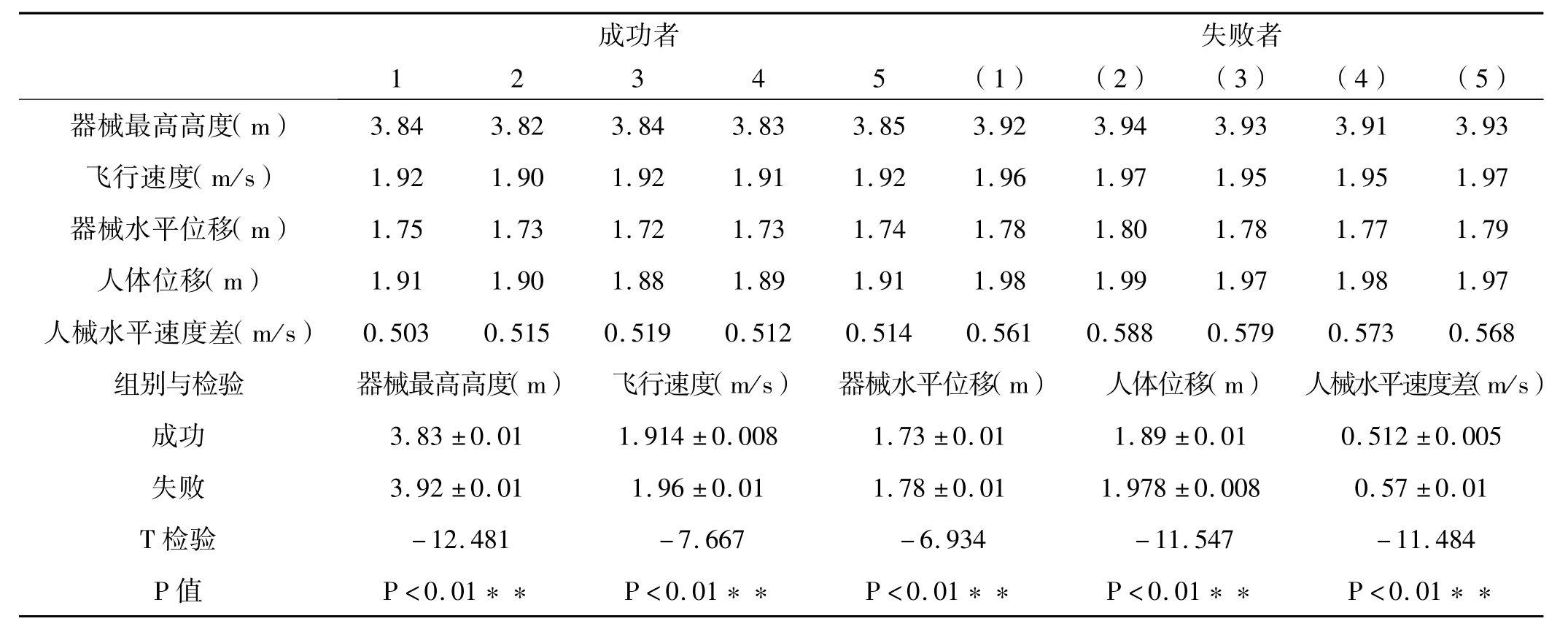
表3 短器械在空中飞行时与人体位移参数变化对比分析

表4 长器械在空中飞行时与人体位移参数变化对比分析
从表3-表4来看,器械被抛出后空中最高的高度,失败者高于成功者,P〈0.01,两者之间的差异性非常显著。就两者录像技术来看,成功者的抓接器械衔接要好于失败者,由此断定失败者抛出的器械高度略高,不利于后续动作的衔接。短器械空中最适宜高度应控制在3.83m左右,长器械应控制在4.10m左右。
器械飞行速度,短器械成功者与失败者差异性达到了非常显著水平,1.914±0.008m/s,1.96±0.01m/ s,P〈0.01。长器械成功者与失败者之间差异性也达到了显著水平,1.62±0.01 m/s,1.646±0.008 m/s,P〈0.05。器械飞行的速度过快容易导致器械位移过大或下落速度过快。
器械水平位移、人体位移及人械水平速度差是导致器械能不能成功抓接的关键技术环节。器械水平位移与人体位移数据差过大,将会导致人体与器械之间的距离过大,影响抓接器械。短器械的器械位移、人体位移和长器械的器械位移,成功者与失败者的差异性均达到非常显著水平,P〈0.01。长器械中人体位移,成功者与失败者之间检测结果差异性显著,P〈0.05。人械水平速度差检测的是器械向前飞行的速度与人体向前滚翻的人体速度之差,此时如果器械快于人体速度则器械先于身体完成动作,如果器械慢于身体动作则身体动作先于器械完成动作,均不利于后续动作的完成。长、短器械的人械速度差,成功者与失败者差异性均达到了非常显著水平,P〈0.01。
2.3 抓接器械阶段动作技术分析
抓接器械动作阶段是指将抛入空中的器械稳定而又准确的抓接住过程。抓接器械虽然是抛接器械的最后一步,也是最重要的一步,不容忽视。抓接器械失误,一是属于未完成动作不予加分,如果器械掉地还会相应扣分,同时给运动员心理上造成极大负担,不利于后续技术水平的发挥;二是抓接器械失误极易对运动员造成身体伤害。因此,我们对运动员抓接器械时的器械下落速度、高度、接器械的角度、两膝角度等因素进行对比分析(表5-表6)。
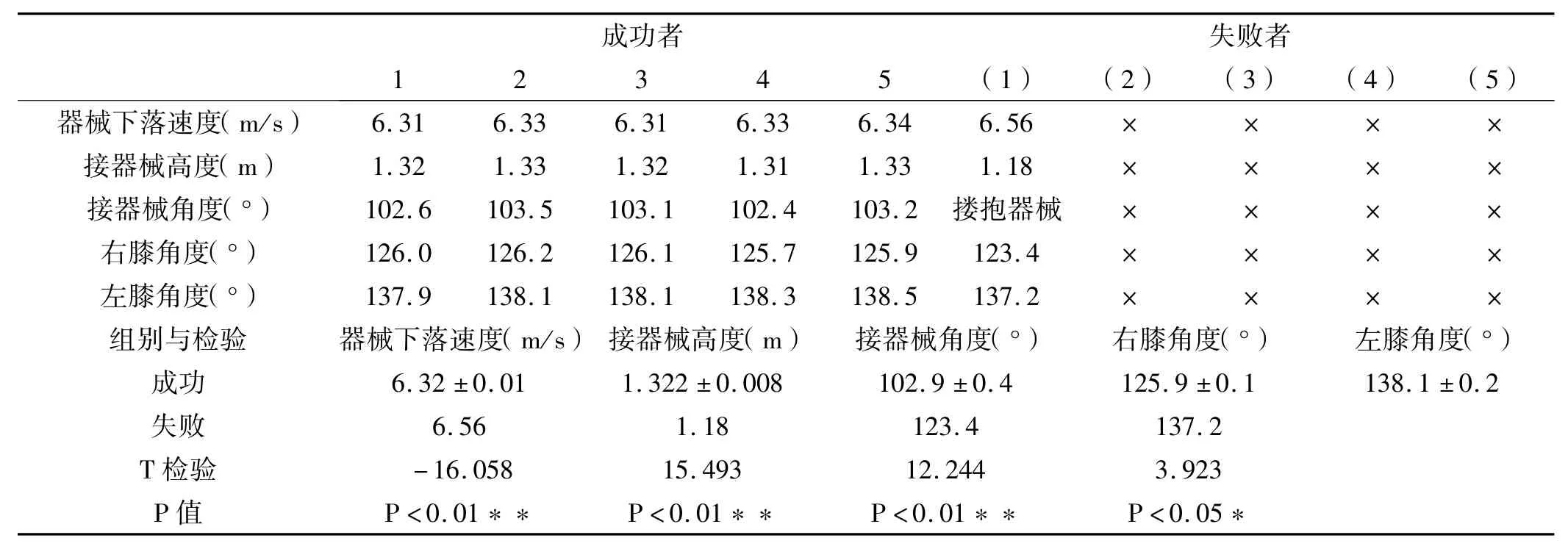
表5 短器械抓接器械时与人体参数变化对比分析

表6 长器械抓接器械时与人体参数变化对比分析
据表5-表6显示,成功者器械下落的速度明显慢于失败者,P〈0.01,差异性非常显著。器械下落速度过快不利于运动员抓接器械,一是运动员来不及判断器械的落点,二是下落速度越快,手在抓接器械时器械受到手掌支撑反作用力的“压缩负荷”越大,容易使器械弹出,导致失误。
抓接器械的高度,成功者要略高于失败者,长器械也略高于短器械,如抓接器械高度过低,不利于抓接器械后向下的顺势缓冲,长器械高于短器械是防止缓冲后衔接动作时长器械触地,造成其他错误而被扣分。成功者短器械抓接器械的高度为1.322±0.008m,失败者为1.18m,P〈0.01,差异性达到非常显著水平。成功者长器械抓接器械高度为1.53±0.01m,失败者为1.47m,P〈0.05,差异性显著。
抓接器械角度也是成功抓接器械的重要环节。由于器械从高空下落其冲力加之器械本身的重量,此时抓接器械的角度过大,手臂会很难控制住器械(主要是长器械),器械会随惯性顶端继续运动,导致器械顶端触地。本次测试中,长器械“(1)”号运动员就是因为抓接器械的角度过大导致器械顶端触地而失误。测试结果显示,成功者与失败者两者之间的差异性达到非常显著水平,P〈0.01。
两膝角度据测试结果显示,在抓接器械时短器械成功者的人体重心高于失败者。短器械成功者右膝角度125.9±0.1°,失败者为123.4°,P〈0.01,差异性非常显著。成功者左膝角度为138.1±0.2°,失败者为137.2°,P〈0.05,差异性显著。因此可以看出短器械中“(1)”号运动员由于抛器械阶段后腿(右腿)过直,没有充分屈曲,在做前滚翻时后腿蹬伸力不够导致前滚翻速度慢于空中器械飞行的速度,在还没有完全起身的情况下器械下落,导致后续抓接的失败“搂抱器械”。成功者长器械右膝角度为127.2±1.1°,失败者为132.6°,P〈0.05,差异性显著。成功者左膝角度为113.7±1.1°,失败者为118.4°,P〈0.05,检测结果差异性显著。由于长器械中“(1)”号运动员器械飞行速度过快、位移过远,器械的下落速度也过快,运动员在前滚翻起身以后,需要重心前移才能抓接器械。因此,所测结果运动员的手在接触到器械时的两膝角度要大于成功者。
短、长器械失败者“(2)至(5)”号运动员最终均以器械掉地失败告终,其导致器械掉地的主要原因是受抛器械阶段运动员出手的高度、角度、速度过大,致使器械在空中飞行阶段器械过高、飞行速度过快、位移距离过远,在完成前滚翻动作时身体不能够触碰到器械而失误。
3 结论与建议
3.1 结论
3.1.1 器械上抛阶段
(1)出手高度:成功者明显的低于失败者,差异性非常显著P〈0.01;(2)出手角度:成功者与失败者之间的差异性达到非常显著水平P〈0.01,失败者出手角度过大;(3)两膝角度:成功者与失败者左膝角度短器械差异性显著P〈0.05,长器械没有显著差异P〉0. 05,右膝角度差异性均为非常显著P〈0.01;(4)出手速度:失败者明显快于成功者,差异性非常显著P〈0. 01。
3.1.2 器械空中阶段
(1)器械空中飞行高度:失败者明显高于成功者,P〈0.01;(2)器械空中飞行速度:短器械成功者与失败者差异性非常显著P〈0.01,长器械差异性显著P〈0.05;(3)人械水平位移:短器械器械水平位移、人体位移成功者与失败者差异性非常显著P〈0.01,失败者人体与器械位移差距过大。长器械器械位移差异性非常显著P〈0.01,人体位移差异性显著P〈0.05,失败者器械位移过小于人体位移;(4)人械水平速度差:成功者与失败者两者之间差异性均达到非常显著水平P〈0.01,失败者人械水平速度差较大。
3.1.3 抓接器械阶段
(1)器械下落速度:失败者明显快于成功者,差异性非常显著P〈0.01;(2)抓接器械时的高度:成功者明显高于失败者,过低不利于抓接器械时的缓冲。短器械成功者与失败者差异性非常显著P〈0.01,长器械差异性显著P〈0.05;(3)抓接器械角度:长器械成功者与失败者差异性非常显著P〈0.01,失败者抓接器械时角度过大。短器械抓接器械时的角度因失败者手与器械未接触因此未测得;(4)抓接器械时两膝角度:成功者要高于失败者,短器械右膝角度成功者与失败者差异性非常显著P〈0.01,左膝角度差异性为显著P〈0.05,长器械左右两膝角度差异性均为显著P〈0.05。
3.2 建议
(1)器械出手时的角度、速度以及高度是成功完成器械抛+接动作的先决条件,运动员要合理控制器械出手时的角度、速度以及高度。短器械出手时器械高度应控制在1.23m左右,长器械为1.32m左右。短器械出手角度应控制在156°左右,长器械为128°左右;动作出手速度不能过快,过快则器械受力过大飞行距离过远。
(2)器械空中飞行阶段关键技术环节是要缩小人械水平速度差,尽可能使人械位移速度、位移距离达到一致。
(3)抓接器械时要尽可能的随着器械下落的方向进行合理缓冲,抓接器械的高度不能过低,避免器械向下缓冲衔接动作时导致器械碰地,造成其他错误而被扣分。
[1]李世明,高金栋.竞技健美操屈体分腿跳成俯撑动作的运动学分析[J].天津体育学院学报,2011,26(1):37-41.
[2]郭琼珠,陈峰.女子武术套路运动员难度动作落地稳定性的运动生物力学分析[J].武汉体育学院学报,2010,44(6):48-52.
[3]中国武术协会审定.2004年武术套路竞赛规则[S].北京国家武术运动管理中心,2004.
[4]陆保钟,姜桂萍,纪仲秋.艺术体操球操抛接动作的运动分析[J].北京体育学院学报,1989,44(2):88-91.
K inematic Analysis of the Instruments′Throw ing and M eeting Difficulty Action 445+8 in CompetitiveW ushu of Bank B
LIU Jian,et al(Ludong University,Yantai Shandong,264025)
The 3-D image analysis system of biomechanics is used to obtain the biomechanical parameters of the 445+8 high-difficultymovements by the athletes of different ranks.The paper analyzes the reasons and the differences of the success or failure in the technicalmovement,but also finds out themain reason of failure in order to improve difficultymovement of instruments′throwing and meeting,improving the athletes′performance and providing scientific bases.
competitiveWushu;throwing and meeting;445+8;action features;biomechanics
G852
A
1001-9154(2014)01-0089-06
G852
A
:1001-9154(2014)01-0089-06
国家体育总局武术研究院青年资助项目(WSH2011Q001)。
刘健(1978-),男,山东淮坊人,讲师,体育硕士,研究方向为武术套路教学与训练。
2013-10-08
