深水钻井船动力定位时域仿真分析
2014-07-18田华勇张海彬
田华勇 张海彬
(中国船舶及海洋工程设计研究院 上海 200011)
深水钻井船动力定位时域仿真分析
田华勇 张海彬
(中国船舶及海洋工程设计研究院 上海 200011)
时域仿真分析是获得动力定位控制精度的必要手段。文中进行了SIMO软件理论和应用方面的研究,基于SIMO软件建立动力定位能力时域仿真分析流程;以深水钻井船为算例,通过动力定位系统控制参数和Kalman增益参数的调整,获得较好的计算结果,并进一步分析了控制参数的不同取值对动力定位能力的影响。文中建立的深水钻井船动力定位能力仿真分析流程可以为工程实践提供参考。
深水钻井船;动力定位;时域分析;Kalman滤波;最优控制理论
引 言
在深海作业的船舶或平台必须配备动力定位系统,通过频域分析我们可以得到动力定位系统的总功率利用曲线和抗风能力曲线,其结果是在静态平衡的基础上计算得出[1]。然而,船体在海洋环境中所受风、浪、流等载荷不断地变化,动力定位系统对动态载荷的反应以及对船体的控制效果是实际工程应用更为关注的[2-3]。
由于深海自然环境条件恶劣,定位难度更大,而海上钻井作业对钻井船位置偏移的控制要求苛刻,漂移控制应该满足隔水管柱上下球接头所允许的偏移角范围内。一般正常钻井作业允许接头在3°内活动,即漂移范围为(水深-导管柱头高度-防喷器组高度)×tg3°,如果井内无钻具时,允许球街头在10°内活动,即漂移范围为(水深-导管柱头高度-防喷器组高度)×tg10°。动力定位过程中环境载荷的改变、控制系统对定位信息的处理以及推力系统的响应等三方面只能在时历分析中加以考虑。在工程设计阶段,动力定位精度是比较重要的技术指标,而时域分析是获得动力定位控制精度的必要手段,所以对钻井船在深海环境条件下的动力定位时域仿真分析很有必要。
本文将对时域计算软件SIMO进行理论和应用方面的分析,建立基于SIMO的动力定位时域仿真分析流程,获得钻井船在深海环境条件下的动力定位精度和功率消耗情况。
1 SIMO中动力定位时域仿真分析的理论和应用分析
1.1 SIMO中的时域计算
SIMO是Marintek开发的软件,广泛用于计算海洋复式结构物的运动时域模拟和定位能力分析[4]。SIMO中时域计算的本质是求解运动方程,在每个时间步计算船体的非线性运动响应。下面简要分析如何处理频域运动方程以用于时域计算。
以正弦运动为例,运动方程一般可以写成:

式中:M为由频率决定的质量矩阵;m为船体质量矩阵;A为由频率决定的附加质量;C为由频率决定的阻尼矩阵;D1为线性阻尼矩阵;D2为二阶阻尼矩阵;f可由决定;K为静水力刚性矩阵;x为位移向量;q为外载荷向量。
运动可以分解为两部分,高频(波频)部分和低频部分。同时外载荷也可以分为高频(波频)和低频两部分。
波频运动的本质是简谐运动,运动可以在频域内进行求解,这要求运动相对波浪而言为线性响应,也就是说二阶阻尼矩阵D2为零,且静水力刚性矩阵K为常数。波频运动方程在频域内可写成:

在SIMO进行时域模拟的过程中,高频运动的频率ω会进行更新。由于将高频运动分离出来,低频运动方程就可以进行时域计算,其动态平衡方程可以写成:

式中:qWI为风载荷为二阶波浪诱导力;qCU为流载荷;qext为其他外部力(波浪漂移阻力、来自定位和连接单元的外力等)。
1.2 SIMO中的动力定位计算
动力定位是指通过自动控制保持船体位置和艏向的技术[5],系统组成包括测量系统、推力系统和控制系统,其中控制系统是核心部分。因为动力定位系统只对船体的低频运动偏移做出反馈控制,所以需要根据测量结果确定船体的低频位置信息。位置估计和反馈控制是动力定位比较重要的两方面。动力定位时域仿真分析指的是模拟船体在动态环境载荷作用下和动力定位系统控制下的运动,为了实现这个功能,SIMO集成了动态环境载荷生成、低频位置估计、动力定位控制和推力分配等方面的数值计算。
动力定位控制环组成部分和理论基础概括为:
(1)扩展的Kalman滤波器,以Kalman滤波理论为基础;
(2)反馈控制器,以最优控制理论为基础[6];
(3)推力分配系统,以最优化控制理论为基础。
SIMO中动力定位系统的模拟流程分列如下:
● 推力分配系统根据总的推力和力矩需求计算每个推进器的推力大小和方向;
● 进行运动方程的时域求解,获得船体的最新位置;
● 利用Kalman滤波器确定船体低频运动的位移和速度;
● 与目标位置进行对比,获得低频位移的水平偏移量;
● 根据位移的偏移量和船体速度确定总的推力和力矩需求。
1.3 SIMO中的动力定位控制策略
SIMO中提供两种控制策略[4],分别为PID控制器和基于Kalman滤波的控制器,因为后者基于现代控制理论,可以解决PID控制器中相位滞后等问题,应用较多,具体理论内容可参考文献[7]。下面以船体X方向的运动为例来说明基于Kalman滤波控制器的应用流程。这里把SIMO中用于估计船体位置的部分称作估计器,把反馈控制部分称作控制器。
SIMO中把船体测量系统的位置测量值与Kalman滤波器估计值的差值称为过程更新项。估计器中的状态变量会用过程更新值与Kalman增益的乘积来更新。

式中:xLF和xHF分别表示低频和高频运动位移值,这里可以看成先验估计值,由低频运动方程和高频运动方程求得。
接着更新低频变量和高频变量:

动速度;这里得到的xLF为后验估计值,并输入到控制器中。
缓变载荷FBx的更新为:

在进行下一个时间步计算的时候,高频运动的频率根据Balchen[8]来更新。通过估计器的计算,就可以得到每个时刻低频运动的位置,接着进入控制器的计算。
动力定位的推力需求是通过低频运动位移偏差的反馈控制和环境载荷的前馈控制得到的,首先通过低频运动变量得到推力反馈值:

式中:FTx为推力系统作用于船体的推力;和表示速度和位移与目标位置的偏差;表示控制增益矩阵。
在环境载荷作用的情况下,满足动力定位需求的推力必须加上用于抵消缓变载荷的部分,其中缓变载荷包括估计值和风力测量值,如式(9)所示:

式中:FBx表示缓变环境载荷;FMx表示测量的风载荷。得到推力需求后,SIMO会自动为每个推力器分配推力的大小和方向。
在每个时间步重复从估计器到控制器的计算,就可以完成对动力定位的时域计算。
1.4 SIMO参数的输入和调整
SIMO中的Kalman增益和控制增益是需要输入的。Kalman增益值的准确与否直接影响船体低频运动位置的估计,进而影响动力定位控制精度,而控制增益的取值对于推力系统功率消耗是否最小至关重要。SIMO中给出了用于初始调节的建议值。
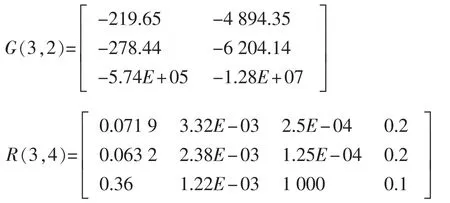
控制增益的建议值为:
Kalman增益的建议值为:

控制增益和Kalman增益建议值只是用于初始计算。在应用SIMO进行动力定位时域计算时,应在初始值的基础上,根据初算结果的特点,依据Kalman滤波算法和最优控制的原理对增益值进行调整,以达到比较好的计算结果。可以通过改变Kalman增益值来调整测量值和过程值所占权重[8-9]:当动力定位控制结果不好,并且位置预测结果中出现比较多的高频成分,这时应该降低和的值,使过程值占到更大的权重。控制增益的取值受系统周期Tx的影响,若系统周期较小,则控制增益较大,由一定的位置偏移产生的推力需求会变大,控制精度会变好,但调整频率较高,功率消耗较大;若系统周期较大,则控制增益较小,由一定的位置偏移产生的推力需求会变小,控制精度会变差,但功率消耗会变小。
2 动力定位时域分析实例计算
现以“MARIC 10000”号钻井船(如图1所示)为例,进行基于SIMO的动力定位时域仿真分析。该船主尺度如表1所述,6个全回转推力器的布置如图2所示,其坐标参照表2。

图1 “MARIC 10000”号钻井船效果图

表1 MARIC 10000号钻井船主尺度

图2 钻井船推力器位置示意图

表2 推力器最大推力与位置坐标值
SIMO中控制参数的设置需要经过多次调整以使控制效果达到理想的状态。在输入文件中对动力定位计算的相关设置为:
(1)推力分配策略的选择与参数设置
选取基于Kalman滤波器的控制器,相关参数为:
(2)时间序列的生成方法选取余弦函数法;
(3)环境条件的设置
风:API风谱,风速为29.3 m/s,风向为200°;浪:JONSWAP双参数波谱,有义波高5.27 m,谱峰周期12.95 s,浪向为180°;流:定常流,流速0.5 m/s,流向为225°。
在6个推力器正常工作的情况下,计算时间2 048 s,时间步长取0.5 s,对不同案例的计算如下。
2.1 Case 01 以建议值为基础的初始计算
将控制增益和Kalman增益值取为SIMO的建议值,计算结果如下页图3与图4所示。
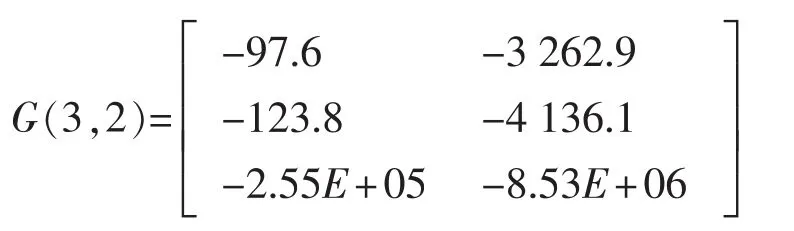
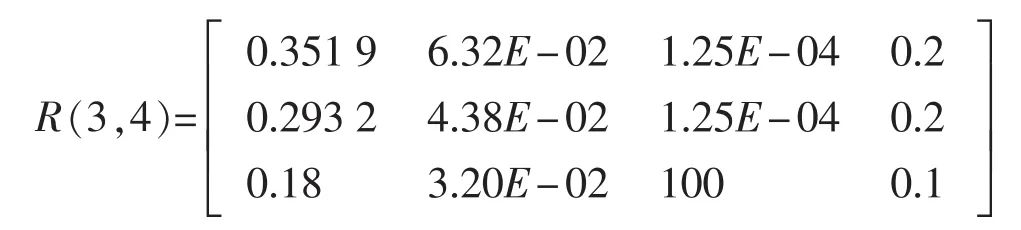
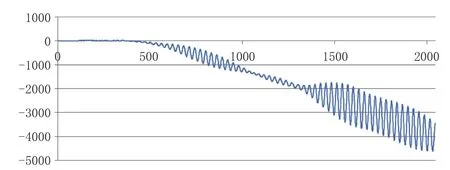
图3 Case 01 船体 X 方向低频位移 / m
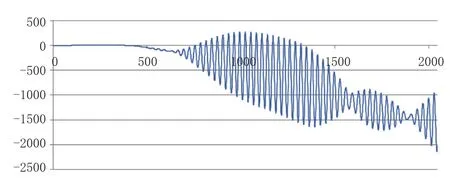
图4 Case 01 船体 Y 方向低频位移 / m
2.2 Case 02 降低船体位移和速度的Kalman增益
从Case 01的结果可以看出,对船体的低频位置估计出现问题,可能是低频位置和速度的Kalman增益过大所致。现将其减小,控制增益保持不变,缓变载荷依然采用流速估计的方法,具体如下所示。


图5 Case 02 船体 X 方向总位移 / m
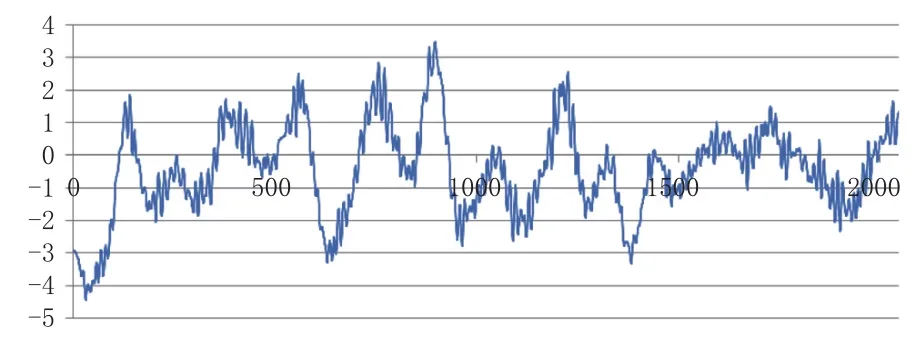
图6 Case 02 船体 Y 方向总位移 / m
从图5 -图6结果可看出,改动之后的动力定位结果明显得到改善,横向、纵向的位移和艏向的角度都可以保持在比较小的偏移范围内。从总位移曲线清晰可见低频运动和高频运动叠加后的结果,船体的位置改变主要是以低频位移为主,高频运动只是在低频运动位置的小频振荡。进一步可发现船体的初始位置还是偏大,这可能是没有在控制器中考虑测量风载荷的结果。SIMO在动力定位时域模拟之前,会根据给出的控制增益和环境条件进行静水平衡计算,由此得到的平衡位置用于之后的时域模拟。
2.3 Case 03 在控制器中计及测量的风载荷
针对Case 02中初始值过大的情况,现通过输入文件中参数的设置,将风载荷考虑在初始计算中,并选择低通滤波器,测量风载荷的截断周期取50 s。保持控制增益和Kalman增益等其他参数与Case 02相同,结果如图7 -图10所示。
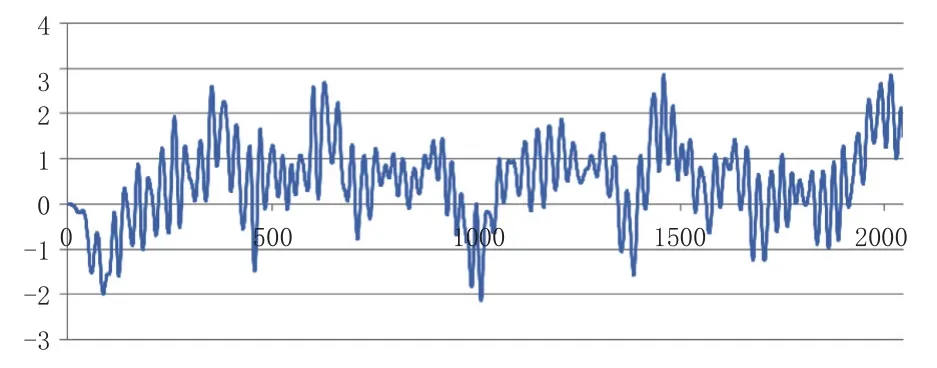
图7 Case 03 船体 X 方向总位移 / m
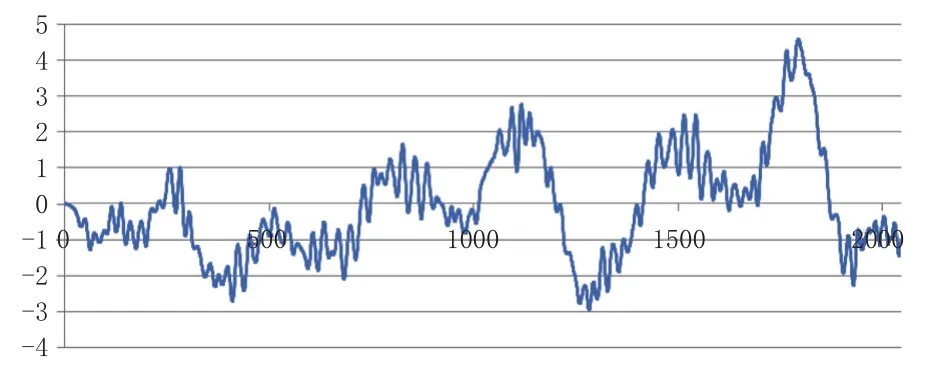
图8 Case 03 船体 Y 方向总位移 / m
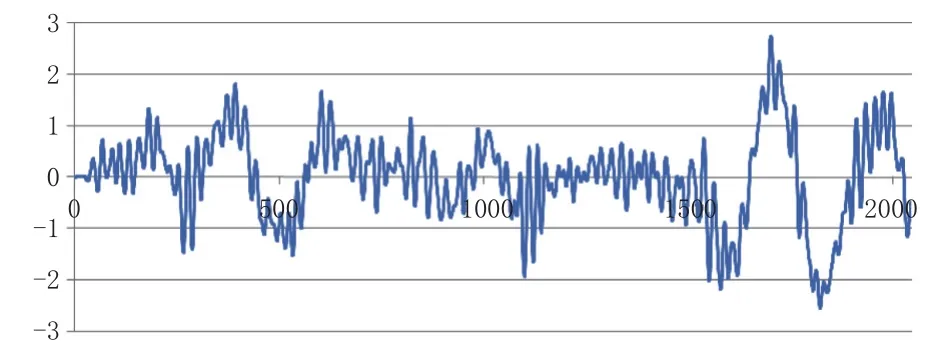
图9 Case 03 船体艏向偏移角度 / (°)
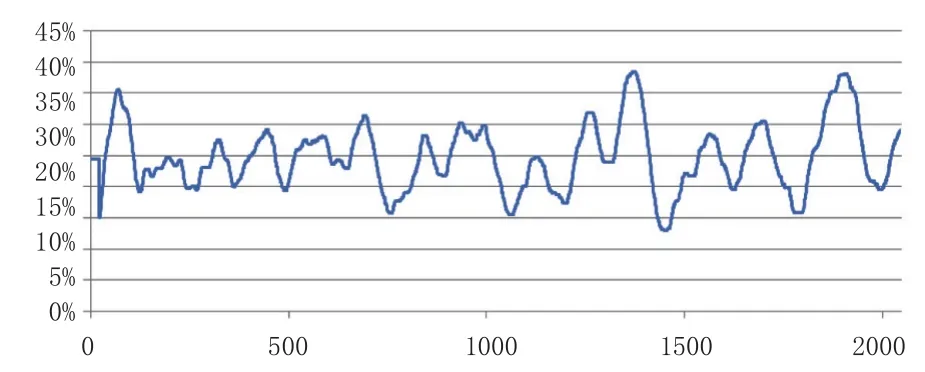
图10 Case 03 推力系统总功率消耗时历曲线 / m
从结果中可以看出,初始位置得到很好的改善,这与SIMO中确定初始位置大小的算法有关。因为推力需求通过FTx= FTx-FDx-FMx得出,在初始计算的时候只有环境载荷,总推力应与环境载荷平衡,即等式左边与等式右边相等。这里若不考虑风载荷FMx,则等式右边的FTx值就会比较大,进而导致初始偏差比较大。
通过Case 03的计算,计算结果已经比较理想,图10也给出总功率消耗的时历曲线,可见整个推力系统在时域仿真分析中的功率消耗情况。
2.4 Case 04 不同控制增益计算结果的比较
保持Kalman增益等其他参数不变,并将结果与Case 03的结果对比,结果如图11 -图14所示。
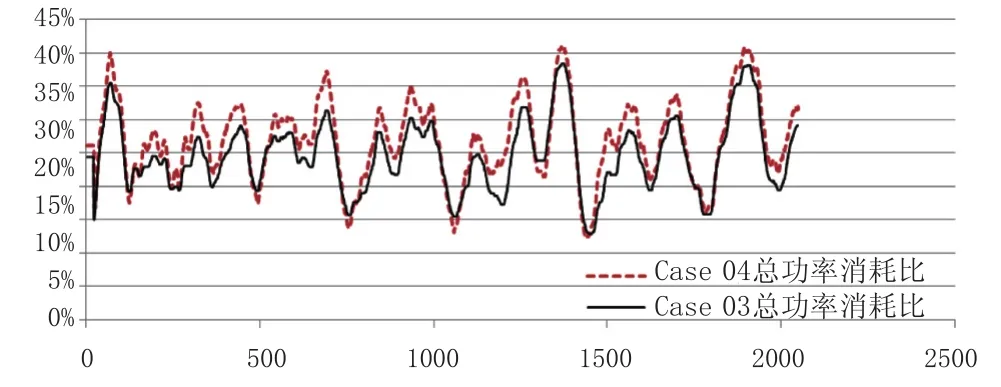
图11 Case 04 与 Case 03 总功率消耗的对比 /m

图12 Case 04 与 Case 03 船体 X 方向总位移的对比 / m

图13 Case 04 与 Case 03 船体 X 方向总位移的对比 / m
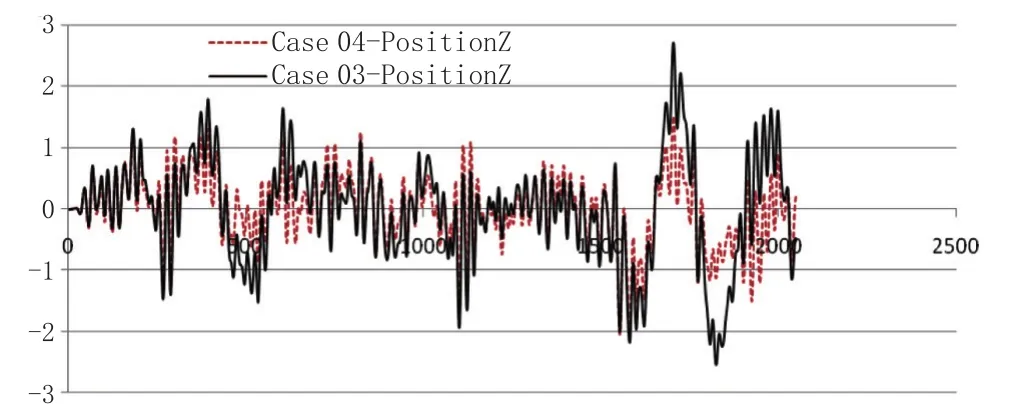
图14 Case 04 与 Case 03 艏向偏移角度的对比 / m
从对比图中可以看出,在控制增益G增大之后,船体保持位置所需要的总推力是增大的,但却有着更好的控制精度,所以提高动力定位系统的控制精度,可能意味着更大的功率消耗。如何在尽可能低能耗的情况下达到尽可能高的定位精度,也是现代动力定位系统发展的一个重要方面。
SIMO中还有其他结果可以进行图示,比如每个推力器的推力大小和方向的时历曲线。通过推力的时历曲线可以分析某一具体推力器在整个动力定位时域模拟过程中推力的提供情况。根据全局坐标系下船体X和Y方向的总位移可以得到船体的运动轨迹,可以更具体地看出在在动力定位系统的控制下船体的运动情况。

图15 全局坐标系下船体的运动轨迹
3 结 论
本文对SIMO进行理论和应用方面的研究,基于SIMO进行深水钻井船动力定位的时域仿真分析,经过多次计算总结Kalman增益和控制增益的调整机制,并分析动力定位系统不同参数设置对动力定位精度和功率消耗的影响,形成准确有效的深水钻井船动力定位仿真分析流程。通过时域仿真分析,可以获得动力定位精度和功率消耗情况。两者作为重要的技术指标,可以为实际工程设计提供参考。此外,对于钻井船这种对动力定位要求较高的船型,可以在本文建立时域仿真方法的基础上,进一步研究立管或辅助系泊系统等对定位的影响。
[1] 何进辉.深水钻井船动力定位能力分析方法研究[D].中国船舶及海洋工程设计研究院,2012.
[2] 何进辉,张海彬.动力定位能力分析中的风速和波高关系研究[J].船舶,2012(2):11-16.
[3] 刘学勤,张海彬.深水钻井船运动性能分析[J].船舶,2013(3):12-15.
[4] Marintek Report. SIMO Theory Manual Version 3.6, rev2[R]. 2009.
[5] ABS. Guide for thrusters and dynamic positioning systems,Section 3[S]. 1994.
[6] 顾幸生,刘漫丹,张凌波.现代控制理论及应用[M].上海:华东理工大学出版社,2008:102-115.
[7] OLIVIER C. Introduction to Kalman Filter and its use in dynamic positioning systems[J]. Dynamic Positioning Conference, 2003.
[8] BALCHEN J G. A dynamic positioning system based on Kalman filtering and optimal control[J]. Modeling,Identification and Control, 1980:135-163.
[9] 乔小国.深水浮式结构动力定位能力动态分析[D].哈尔滨:哈尔滨工程大学,2010.
Time domain simulation analysis of DP for deepwater drillships
TIAN Hua-yong ZHANG Hai-bin
(Marine Design & Research Institute of China, Shanghai 200011, China)
Time domain simulation analysis of DP is necessary to obtain the control of the dynamic positioning accuracy. This paper carries out the investigation of the theory and application of SIMO software, and performs the time domain simulation analysis of the dynamic positioning by SIMO. Taking a deepwater drillship as an example, the better calculation results can be obtained by the adjustment of DP control parameter and Kalman gain parameter in order to analyze the in fl uence of the different control the parameters of dynamic positioning. The simulation analysis the process of DP for deepwater drillships which is built up in this paper can provide references for practical application.
deepwater drillship; dynamic positioning; time domain analysis; Kalman fi lter; optimal control
U666.11
A
1001-9855(2014)03-0073-07
2013-11-05 ;
2013-12-04
田华勇(1989-),男,硕士,助理工程师,研究方向:动力定位时域仿真。
张海彬(1976-),男,博士,研究员,研究方向:海洋工程总体设计。