某单点系泊FPSO运动性能计算分析
2014-07-18何进辉唐
何进辉唐 坤
(1.中国船舶及海洋工程设计研究院 上海 200011;2.中国海洋石油有限公司深圳分公司 深圳518067)
某单点系泊FPSO运动性能计算分析
何进辉1唐 坤2
(1.中国船舶及海洋工程设计研究院 上海 200011;2.中国海洋石油有限公司深圳分公司 深圳518067)
通过浪向角分析确定环境条件,应用商用软件对单点系泊FPSO进行运动性能计算分析,评估FPSO的耐波性并为FPSO提供设计依据。首先采用静态分析方法,计算在不同风、浪、流组合下FPSO艏向和浪向之间的夹角与有义波高的关系,给出有义波高相对于夹角的包络线,并根据此包络线确定运动性能分析的环境条件;其次,介绍船体横摇运动的阻尼成分以及阻尼的估算方法,并采用三维线性势流理论计算船体运动的RAO;最后,对某型单点系泊FPSO进行浪向角和运动性能的实例分析,评估该型FPSO的耐波性。
海上浮式生产储油船;单点系泊;运动性能分析;浪向角分析
引 言
海上浮式生产储油船(Floating Production Storage and Offloading,简称FPSO)在海洋环境受到风、浪、流的联合作用。当FPSO锚泊在波浪中,如果波浪是规则的,除了产生与波浪频率一致的摇荡运动外,还伴有附体位置的偏移;如果波浪是不规则的,则伴有长周期的漂移运动[1]。若再加上风和流的影响,则FPSO的运动幅值可能会很大。因此,FPSO往往需要配备可靠的锚泊方式。
单点系泊是FPSO最常用的系泊方式,它具有明显的受力和运动特点:系泊的FPSO可以绕着单点作360°旋转,根据风、浪、流的综合作用,向着产生最小外力的方位转动,从而使作用在单点上的系泊力能够经常保持最小[2],即风标效应。FPSO在海洋环境中受到的风、浪、流的情况复杂多变,不同的风速、波高、流速组合下,FPSO绕单点旋转的艏向与波高的关系也不相同。然而,对FPSO进行运动性能分析时,波高和船体艏向与浪向夹角的关系对运动幅值的影响是至关重要的。
本文采用静态分析法,对单点系泊FPSO在风、浪、流联合作用下的风标效应进行浪向角分析,确定在不同风、浪、流夹角组合下,FPSO艏向和波浪浪向之间的夹角与波浪有义波高的关系,给出波浪有义波高相对夹角的包络线,根据此包络线确定运动性能分析的环境条件,并用于FPSO的运动性能短期预报,评估FPSO的耐波性。
1 浪向角分析
1.1 坐标系定义[3]
水动力计算参考坐标系如图1所示。该坐标用于定义湿表面模型、质量模型以及运动RAO,原点定于水线面上,波浪从船尾向船首为0°,从右舷向左舷为90°。
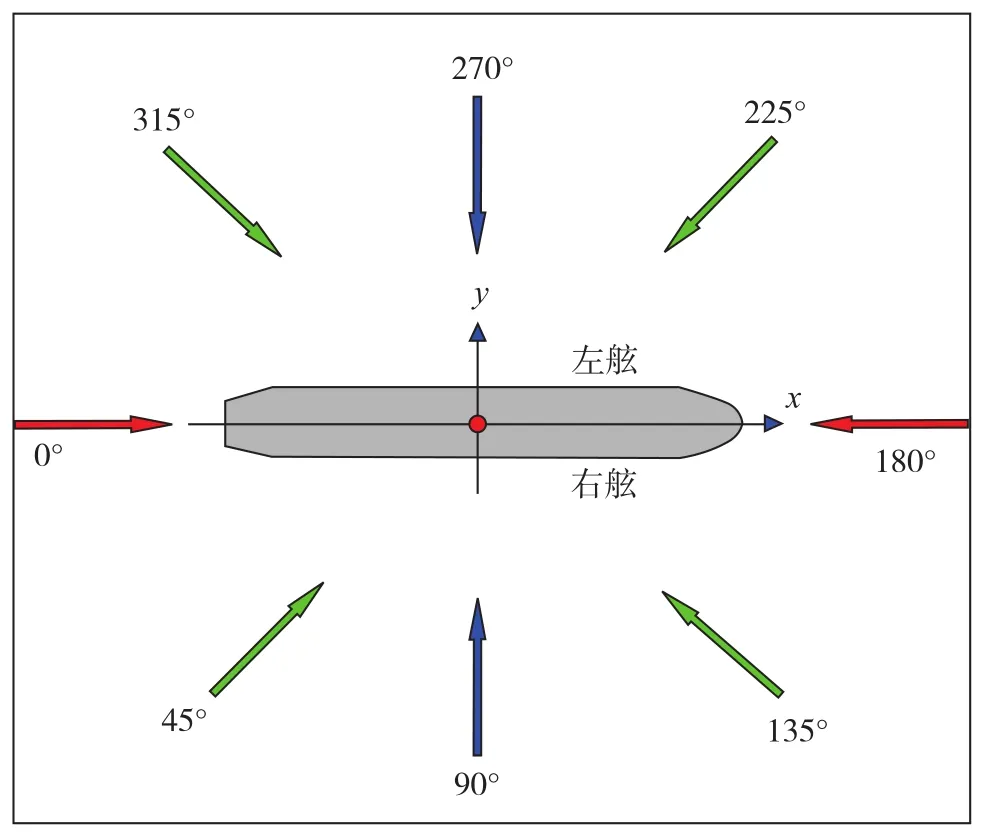
图1 水动力计算参考坐标系
系泊以及运动计算参考坐标系如图2所示,分为固定坐标系(Global System)和随船坐标系(Local System)。

图2 系泊及运动计算参考坐标系
1.2 平衡位置的计算
FPSO在系泊力和风浪流等环境载荷的共同作用下,最终达到平衡位置,此时船体受到的环境载荷最小。
平衡位置是通过牛顿迭代方法不断迭代得到的,如式(1)所示:

式中:xn是FPSO在固定坐标系下的第n步迭代得到的位置;xn+1是第n+1步迭代后得到的位置;是FPSO位置xn的函数,包含所有系泊力和环境力的矢量和;是Jacobian矩阵,是FPSO位置xn的函数,它是载荷刚度的总和。
1.3 环境条件与风、浪、流组合
为了考察FPSO抵御风暴的极限能力,结合FPSO作业海域海况,对其浪向角分析采用500年一遇的环境条件,如表1所示。

表1 500年一遇环境条件
该FPSO作业海域属于热带风暴区域,极端气候主要受到飓风或者台风影响,从而造成风、浪、流的强度和方向组合的迅速变化。根据文献[5]建议,定义了两种典型的环境条件组合类型:
(1)波浪主导:风向与浪向的相对夹角范围为-45°~ +45°,流向与浪向的相对夹角范围为+30°~ -30°,角度间隔均为15°。
(2)流主导:风向与浪向相对夹角范围为-45°~ +45°,流向与浪向的相对夹角范围为-60°~ -120°,角度间隔均为15°。
波浪主导和流主导的环境条件组合下,风、浪、流的强度以及夹角与折减系数的关系如表2所示。
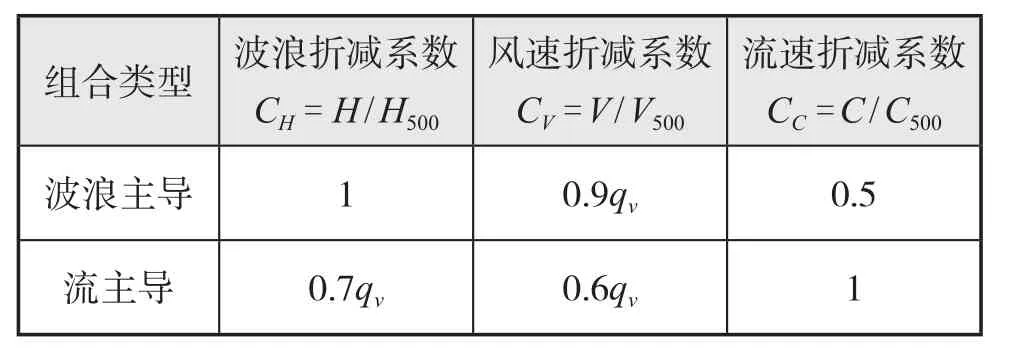
表2 不同环境条件组合类型的风、浪、流强度
表中:CH、CV和CC分别为波浪、风速、流速的强度折减系数;下标H代表波高,V代表风速,C代表流速,500代表500年一遇; qv为折减因数,由式(2)计算得到。

2 运动性能预报
2.1 横摇阻尼的估算
相对于其他模式的阻尼估算,横摇阻尼的估算更加复杂且具有更多的不确定性,这是因为横摇阻尼的非线性和粘性;而计算船体运动的绕辐射水动力软件通常基于线性势流理论,这些软件计算的阻尼系数通常是线性的。此外,也很难界定实船中会有哪些阻尼成分会被忽略,如摩擦、拖曳力、流体的分离或者其他因素造成的阻尼,而这类阻尼在势流理论中并不能通过直接建模来计算[6]。
尽管要完全精确计算横摇阻尼几乎不可能,但是横摇阻尼的估算通常可以采用在工程上可以接受的三种方法:
(1)模型试验;
(2)半经验方法;
(3)直接数值模拟方法。
模型试验是确定船体横摇阻尼最为准确的方法,但其成本最高。直接数值模拟方法计算结果仍然不够可靠。所以半经验方法仍然是目前采用最广泛的方法。
其中,ITH(Ikeda, Tanaka, Himeno)方法是估算船形横摇阻尼最常用的一种半经验方法。ITH方法是基于一系列静水中的衰减试验结果,通过拟合经验公式与试验结果相吻合而得到的。ITH方法计算过程比较复杂,在文献[7]中有详细阐述,本文限于篇幅,在此仅作简要介绍,见式(3):

式中:BF为船体湿表面引起的横摇阻尼;BE为流体分离造成的漩涡而产生的阻尼;BL为有航速船舶的升力效应产生的阻尼;BW为波浪辐射阻尼;BBKN为舭龙骨法向力的阻尼;BBKH舭龙骨改变船体压力而产生的阻尼;BBKW舭龙骨产生的波浪阻尼; BSK为尾鳍的阻尼。
总阻尼BT可分为一次项和二次项:

其中的二次项可线性化为:

总阻尼为:

运动方程式可写成:

式中:ω为波频;θmax为最大横摇角;A为波幅,通常波幅取为有义波高的一半,即;或者简单地取为单位波幅。A的取值对最大横摇角θmax有决定性的影响,从而对阻尼系数的值也产生一定影响;反之,对横摇运动幅值同样会产生一定的影响。因此,运动方程的求解必定是一个不断迭代的过程。
运动方程求解结束后,可得到船体运动响应幅值算子RAO(Response Amplitude Operator)。RAO是指船体在单位波幅的规则波作用下的响应,可表征船体在不规则波中的运动特性。
2.2 短期预报
在获得FPSO运动响应的RAO后,即可结合由FPSO使用海域海况资料与浪向角分析结果确定的环境条件包络线,采用谱分析方法预报平台在不规则波中的短期响应,包括运动响应和气隙等。
平台运动响应在短期内可看成平稳随机过程,其响应谱可表达为:

大量的实践表明,平台运动幅值的短期响应服从Rayleigh分布。该分布只有方差σ2一个参数,可由响应谱按下式直接得到:

这样,可获得平台运动短期预报的各种统计值,包括均值、有义值、十一值等。其中,单幅有义值的表达式为

此外,可进一步求短期响应的最大值。短期响应最大值与有义值的关系为:

式中:n为该变量的短期循环次数,对于3小时,其表达式为:

式中:m0和m2分别为响应谱的零阶和二阶矩。
3 实例分析
3.1 浪向角实例分析
以下为一艘15万吨级FPSO的主尺度:垂线间长254.00 m、型宽48.90 m、型深26.70 m、满载吃水17.80 m、满载排水量204 557 t、单点系泊内转塔中心位置距离首垂线19.8 m。湿表面模型如图3所示,波浪漂移力系数、风载荷系数、流载荷系数见图4 -图7。其中,波浪漂移力系数是指二阶波浪力传递函数QTF(Quadratic Transfer Function)通过水动力计算求得,用于求解平均波浪漂移力;风载荷系数与流载荷系数由OCIMF(Oil Companies International Marine Forum)系数法[8]求得,表征单位风速/流速下船体受到的风载荷与流载荷。
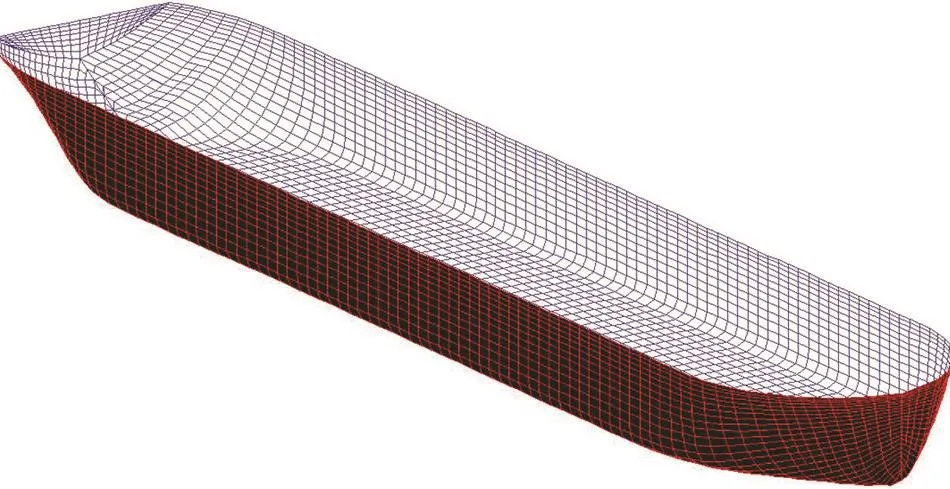
图3 FPSO湿表面模型

图4 纵向波浪漂移力系数(kN / m2)

图5 横向波浪漂移力系数(kN / m2)

图6 满载工况风载荷系数(kN·(m / s)-2)
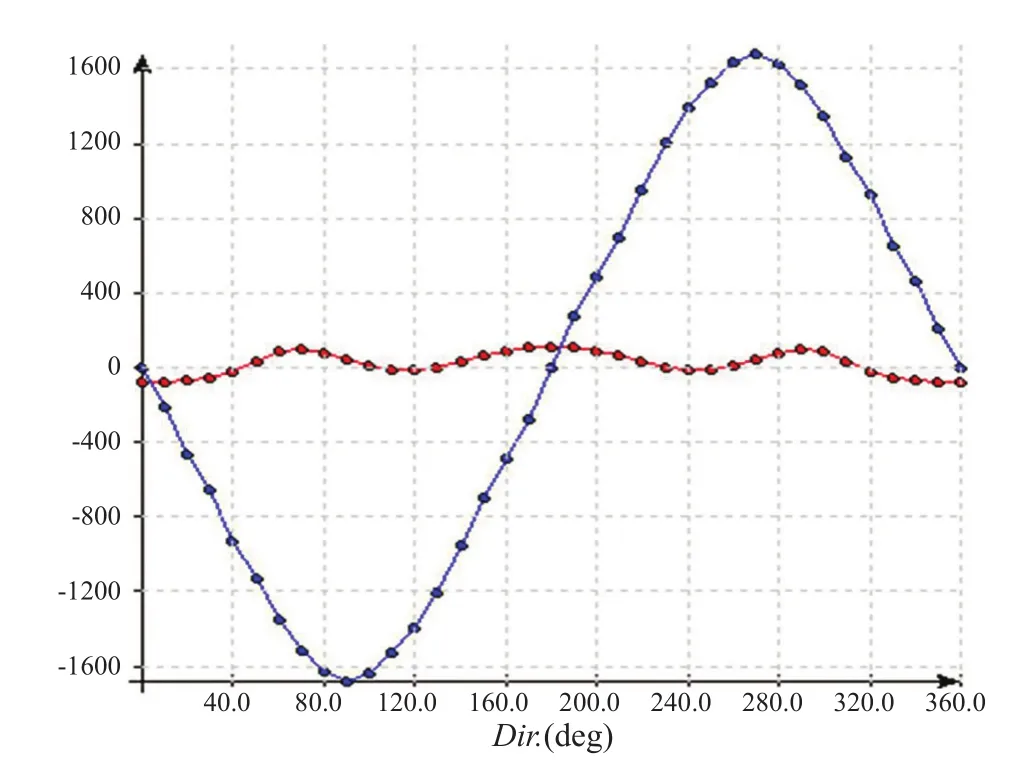
图7 满载工况流载荷系数(kN·(m / s)-2)
浪向角计算分析基于BV开发的商用系泊软件Ariane7。Ariane7可用于单体船或多体船的静态/动态系泊分析计算,在海洋工程系泊分析领域已有20多年的应用经验,应用范围广泛,其可靠性已经获得到充分认可。在给定波浪主导和流主导的风浪流组合下计算了船体艏向与浪向的夹角和有义波高之间的关系,计算结果见图8。图中横坐标为船体艏向与浪向的相对夹角,纵坐标为有义波高。

图8 浪向角分析结果——艏向与浪向的夹角和波高关系
由图8可见,单点系泊FPSO风标效应较好,当有义波高较大时,船体艏向对浪向的跟随性较好。波浪主导环境条件下,有义波高较大,船体艏向与浪向之间的夹角不超过30°;流主导的环境条件下,流速较大、有义波高较小,船体艏向对流向的跟随性较好,船体艏向与浪向之间的夹角最大可达到75°左右。为使计算运动性能的预报趋于保守,结合海况条件,采用如图8所示的包络线作为运动性能预报的波浪参数,其关键点分别为:
3.2 运动性能实例分析
运动性能计算分析[9]基于BV开发的HydroStar商用软件。HydroStar是由BV于1991年开发的基于三维线性势流理论的水动力软件,它能够完整地求解在有限水深和无限水深条件下波浪绕射和辐射的一阶问题,以及浮体有航速或者无航速下的二阶低频波浪载荷传递函数QTF。本文对该FPSO进行运动性能分析,台风海况和季风海况下船体横摇RAO如图9和图10所示。限于篇幅,其他自由度运动RAO在此恕不细述。
在获得了FPSO船体运动RAO之后,结合浪向角分析得到的环境参数包络线,即可进行运动性能的短期预报,结果见表3。
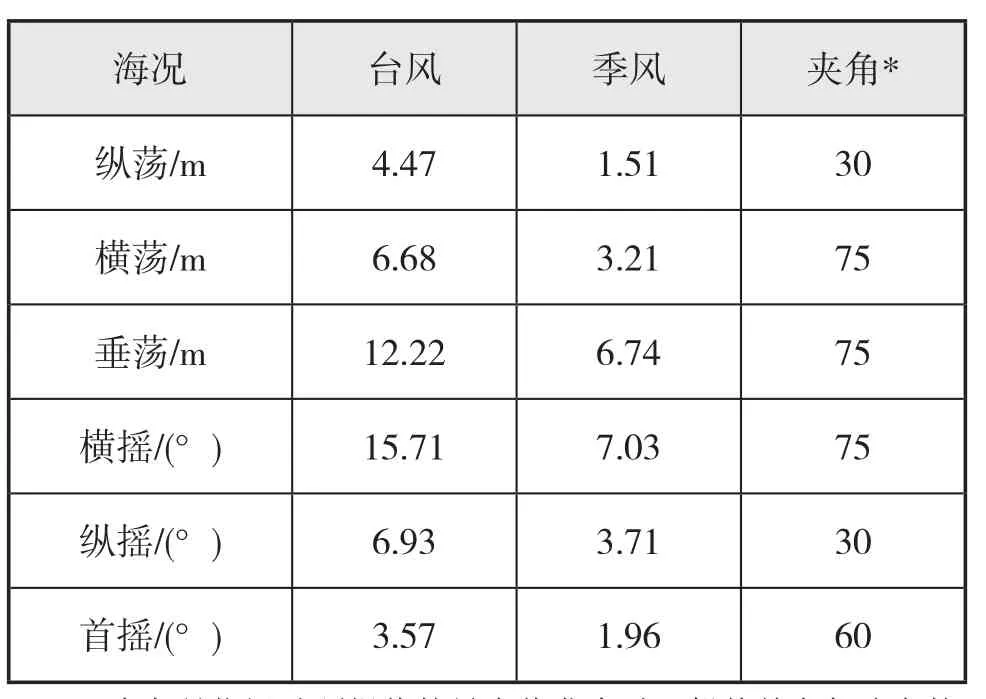
表3 运动性能短期预报最大值

图9 台风海况下FPSO横摇运动RAO(°/ m)

图10 季风海况下FPSO横摇运动RAO(°/ m)
4 结 论
通过对某型单点系泊FPSO的浪向角和运动预报实例分析,可以得出以下结论:
(1)单点系泊FPSO在不同风、浪、流组合中的风标效应较为明显,船体艏向对主要载荷的跟随性良好。
(2)采用ITH法计算横摇阻尼系数时,阻尼值与横摇运动幅值互为影响,横摇RAO峰值在有义波高较大时(即台风海况)比有义波高较小时(即季风海况)更小。
(3)横荡、横摇等运动幅值的最大值发生在75°浪向,而非传统运动短期预报中的90°横浪,是因为浪向角分析确定的包络线使不同浪向下船体运动预报采用的有义波高差异化,表明浪向角分析对单点系泊FPSO的运动性能短期预报具有重要指导意义。
[1] 余建星,王永功,王宏伟.风浪流联合作用下单点系泊船的受力分析 [J].海洋技术 2004,(24):96-100.
[2] 夏运强,唐筱宁,蒋凯辉,等.防风单点系泊系统系泊力理论计算公式研究[J].水运工程 ,2010(4):58-62.
[3] BUREAU VERITAS. Hydrostar for Experts User Manual[S]. 2010, 5.
[4] BUREAU VERITAS. Ariane7 Theoretical Manual[S]. 2007, 8.
[5] BUREAU VERITAS. Classification of Mooring System for Permanent Offshore Units[S]. 2004, 6.
[6] OROZCO J M, RAPOSO C V, MALENICA S. A Practical Procedure for the Evaluation of the Roll Motion of FPSO’s Including the Non Potential Damping[C]. Offshore Technology Conference 2002.
[7] IKEDA Y, TANAKA N, HIMENO Y. A Prediction Method for Ship Roll Damping[R]. Report of University of Osaka. 1978.
[8] BUREAU VERITAS. Ariane7 User Guide[S]. 2010.
[9] 刘学勤,张海彬.深水钻井船运动性能分析[J].船舶,2013(3):12-15.
Motion analysis of single point mooring FPSO
HE Jin-hui1TANG Kun2
(1. Marine Design & Research Institute of China, Shanghai 200011, China; 2. Shenzhen Branch, CNOOC China Ltd., Shenzhen 518067, China)
Environmental condition determined by wave heading analysis has been used for the motion analysis of a single point mooring FPSO by commercial software in order to evaluate its seakeeping performance and provide design basis. Based on the static analysis method, it calculates the relationship between significant wave height and included the angle between ship heading and wave direction under the different combination of wind, wave and current. It provides the contour of the signi fi cant wave height relative to the included angle for the determination of environmental condition of motion analysis. Secondly, it introduces the roll damping component and its evaluation method, and calculates RAO of ship motion by 3D linear potential theory. Finally, it analyzes the heading angle and motion performance of a single-point-mooring FPSO, and evaluates its seakeeping performance.
FPSO; single-point-mooring; motion analysis; wave heading analysis
U661.32
A
1001-9855(2014)03-0007-07
2013-09-22 ;
2013-11-14
何进辉(1986-),男,硕士,工程师,研究方向:船舶与海洋工程设计。
唐 坤(1983-),男,硕士,工程师,研究方向:船舶与海洋工程设计。