接收机滤波器群时延对CAPS伪距测量影响的优化研究
2014-05-13余宜珂杨剑青
余宜珂,杨剑青
(1.中国科学院国家授时中心,陕西 临潼 710600;2.中国科学院国家天文台,北京 100012;3.中国科学院大学,北京 100049)
接收机滤波器群时延对CAPS伪距测量影响的优化研究
余宜珂1,2,3,杨剑青1,3
(1.中国科学院国家授时中心,陕西 临潼 710600;2.中国科学院国家天文台,北京 100012;3.中国科学院大学,北京 100049)
在中国区域定位系统(Chinese Area Positioning System,CAPS)中,带通滤波器是用户接收机的重要组成部分,对于宽频测距码来说,其群时延特性是测距的重要误差来源之一。分析了接收机码跟踪环路,给出相关函数估算测距偏差,对带通滤波器群时延开展仿真分析,并研究了改进接收机设计以优化群时延特性的方法。研究对GNSS接收机的射频和环路设计有一定借鉴意义。
中国区域定位系统(CAPS);带通滤波器;接收机;群时延;测距
CN53-1189/P ISSN1672-7673
2002年,以艾国祥院士为首的中国科学家发明了基于通信卫星的导航系统,即中国区域定位系统(Chinese Area Positioning System,CAPS),该系统创造性地利用通信卫星通过C波段(3.7~4.2 GHz)向用户转发时间和空间基准信息。地面接收机对导航信号进行接收处理和解算,获得位置、速度、时间等信息。与卫星直发式导航系统相比较,中国区域定位系统无需发射专用的导航卫星,能节省大量经费以及稀缺的轨道资源[1]。中国区域定位系统所具有的特点,对中小国家及局部地区使用较少的费用建立自主卫星导航定位系统具有重要的借鉴作用,同时中国区域定位系统也是我国北斗工程中的重要组成部分。目前,为了进一步利用其丰富的频段资源,进一步提升中国区域定位系统的性能,更好地实现导航通信一体化融合,系统将在C波段上采用20 MHz测距码[2-4],这对系统的硬件提出更高的要求。
接收机作为中国区域定位系统硬件的重要组成部分,对信号的捕获跟踪产生重要影响。带通滤波器是接收机的重要组成器件,其性能决定着信号波形的质量,进而对用户接收机的接收效果和定位精度产生重要影响。群时延是衡量传输网络对信号传输时间延迟及信号失真的重要参数[2]。在通信、雷达、卫星等现代电子系统中,随着对信息失真的要求越来越高,群时延已成为非常重要的性能指标[5]。带通滤波器的群时延特性会使扩频码跟踪环路中的相关峰畸变,进而影响接收机中迟早相关器对伪距的测量。所以,研究并解决带通滤波器群时延造成的伪距测量误差,是实现高精度导航必须的要求。
文[6]作者从研究群时延对相关峰的畸变造成的影响入手,为研究群时延对GNSS系统测距误差造成的影响提供了较好的思路。群时延对GNSS测距的影响主要表现在,群时延使信号产生畸变,进而导致相关峰的变形,而相关峰的畸变导致码环难以确定此相关峰主峰的真正位置,即迟早相关器采样点的中心就可能不是信号到达的真正时间,从而导致对码相位测量精度的下降,进而导致了测距偏差[6]。消除群时延误差,或者减小其对测距的影响,是最终实现高精度导航不可回避的。
本文通过对接收机延迟锁定环工作原理的分析,对定位误差作理论分析,以及仿真实验,对优化中国区域定位系统接收机滤波器群时延影响进行优化设计。
1 群时延的概念
群时延的概念最初是为描述信号传输过程中相位失真引入的。传统的群时延概念是为描述线性时不变系统相频特性的平坦度而定义的,其中群时延包含了两个含义:一是当群信号通过系统时,系统对信号整体产生的时延,又称信号能量传播时延或绝对群时延,它是合成包络的传输时间,所以也称为包络时延,它代表波群的信号能量从系统的输入端到输出端所需要的时间,是能量传播时间大小的量度;二是群时延与信号传输失真有密切关系,即相对群时延[2]。群时延可表示为相位相对频率的导数:

群时延的线性和非线性项可用泰勒级数近似展开(一般三阶以上可忽略):

式中,f0为系统带宽的中心频率;ai(i=0,1,2,3…)为各次相位系数。由(2)式可见,群时延展开式在f=f0处引入了一个固定群时延a0,即零阶群时延,ai为对应的i阶群时延,在中心频率f0附近随频率变化而变化,它们不但引入了时延,也引起了信号失真。群时延是波群整体的时延,它反映了线性系统和网络固有的传输特性,同时表征了信号通过系统和网络时的延迟与失真。
2 接收机延迟锁定环工作原理
导航信号所使用的码有着很好的自相关和互相关特性,以全球定位系统使用的C/A码为例,只有当两个相同序列的C/A码对齐时,它们两者之间的相关性才能达到最大值;否则,若两个C/A码为不同序列或者两个相同序列的C/A码之间存在相位差,则它们两者之间的相关性变低,甚至接近于零。
正是根据这个原理,接收机码环首先通过C/A码发生器复制一个其希望跟踪的全球定位系统卫星所发射的、具有一定相位的C/A码信号,并将这一复制码与接收信号做相关运算,然后让码环相位鉴别器检验相关结果是否真的达到最大。为了增强相关结果可比性,码环一般复制3份不同相位的C/A码,即早(Early)码、即时(Prompt)码和迟(Late)码,代表迟早门的间隔。3份码同时与接收信号做相关运算,码环通过比较,从中推算出自相关函数主峰顶端的位置,进而获得码相位的测量值[6-8]。
由于导航信号采用的码的自相关函数三角形主峰左右对称,而码环鉴相的基本原理正是利用了这种对称性。如果早码与迟码输出的相关幅值相等,那么位于迟早码中间的即时码就必然与接收的码在相位上保持一致。
然而在实际情况中,当信号通过滤波器时,由于群时延的影响,不再呈现有棱有角的等腰三角形,并由此导致码环难以确定此相关峰主峰的真正位置,即迟早相关器采样点的中心就可能不是信号到达的真正时间,从而导致了对码相位测量精度的下降,进而导致了测量偏差。
相关曲线计算公式可表示为:

其中,T为积分相关时间,多采用测距码周期Sr表示接收的信号;Sl表示接收机本地产生的标准信号。
对于迟早门间隔为d的延迟锁定环,其鉴相曲线可表示为:

其中信号过零点值ε(d)定义为:

理想鉴相曲线与实际鉴相曲线的过零点偏差即为测距偏差。
3 仿真分析
3.1 带通滤波器群时延对伪距的影响分析
分别取码速率为1.023 MHz、20 MHz的扩频码,将其调制在频率为25.02 MHz的中频载波上,并使其通过4阶巴特沃兹滤波器,取滤波器带宽分别为2.1 MHz、41 MHz,解调后与相同序列的本地码做相关,同时做一组实验对比,即将上述扩频码调制在频率为25.02 MHz的中频载波上,解调后与相同序列的本地码做相关,分别得到相关函数对比图如图1~2。
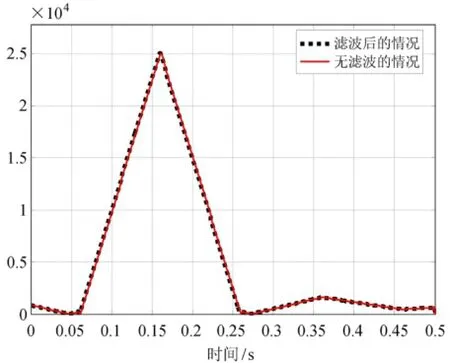
图1 1.023 MHz码的相关函数比对Fig.1 Comparison of the correlation functions of the 1.023MHz code
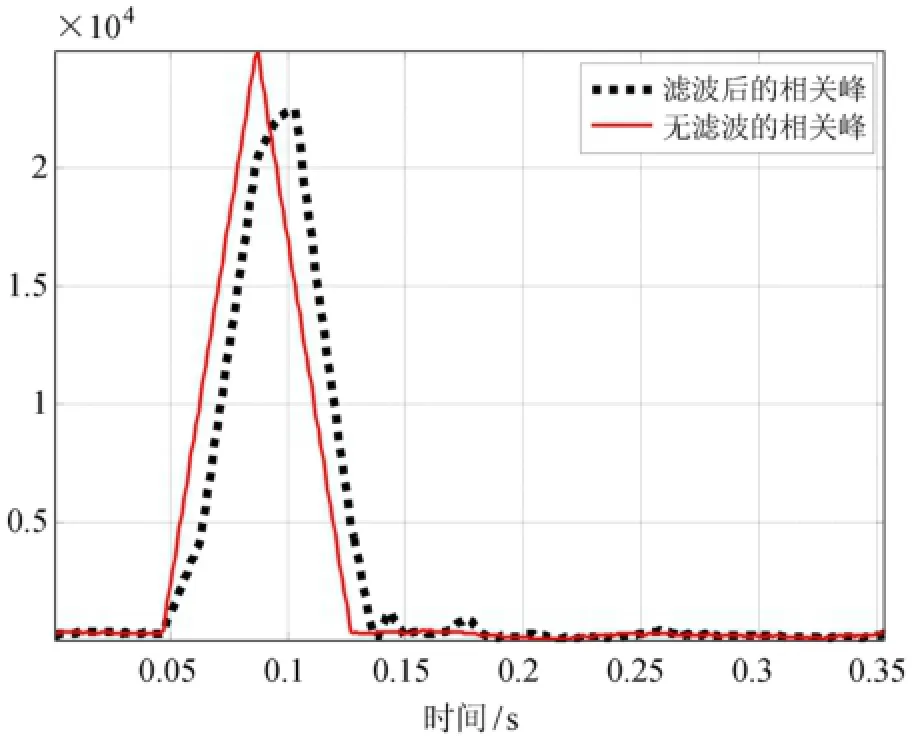
图2 20 MHz码的相关函数比对Fig.2 Comparison of the correlation functions of the 20MHz code
由以上两组实验比对可知,带通滤波器群时延对1.023 MHz码的相关函峰波形的影响很小,而对20 MHz码都有较大影响,其顶部有明显平滑。
由仿真分析可知:对于窄带码而言,其相关函数峰值处波形所受群时延影响而产生的畸变较小。对于宽频尤其是超宽频导航信号而言,其相关函数峰表明波形受群时延影响较大。而在接收机中,往往会用到多级滤波器,如此则会加大时延误差。可见宽频导航信号更易受到带通滤波器群时延的影响。
3.2 带通滤波器群时延分析
实际情况中,滤波器的群时延特性往往是一条随频点的不同而波动的曲线,现以中国区域定位系统接收机中常用的巴特沃兹滤波器为对象进行研究,由于滤波器采用不同的阶数以及带宽,其对信号相关峰所造成的影响不同,故从阶数以及带宽两个不同角度进行研究。
(1)不同阶数滤波器对相关峰的影响
图3分别仿真了不同阶数下,巴特沃兹滤波器的群时延特性,取中心频点为25 MHz,滤波器通带带宽为40 MHz。
由以上分析可知:中心频点为25 MHz,滤波器通带带宽为40 MHz的频带范围内,巴特沃兹滤波器通带内,在低阶时群时延较小且较为稳定,4阶时通带群时延的波动在5 ns以内,通带边缘即过渡带时变得陡峭,群时延的均值以及总体波动随着阶数的增加而增加,然而在高阶时带内群时延值较大,且边带处波动较大。即巴特沃兹滤波器在低阶的情况下有较好的群时延特性。
现采用20.46 MHz的扩频码,将其调制在频率为25.02 MHz的中频载波上,并使其分别通过4阶、8阶、16阶巴特沃兹滤波器,取滤波器带宽分别为40 MHz。解调后与相同序列的本地码做相关,同时做一组实验对比,即将上述扩频码调制在频率为25.02 MHz的中频载波上,解调后与相同序列的本地码做相关,分别得到相关函数对比图如图4。
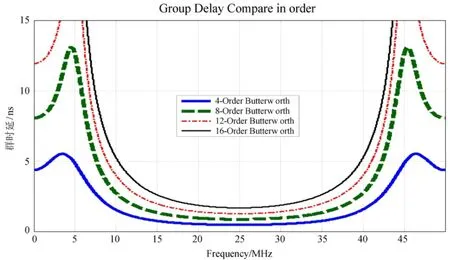
图3 不同阶数滤波器的群时延特性对比Fig.3 Comparison of group delays of filters of different orders

图4 采用不同阶数滤波器形成的相关函数波形图对比Fig.4 Comparison of the wave forms of the correlation functions of using filters of different orders
由仿真可知滤波器阶数越低,所得相关函数波形畸变越小,即越接近无群时延误差的情形。故在硬件设计时可以考虑使用较低阶数的巴特沃兹滤波器,以达到减小群时延影响的目的。
(2)不同带宽滤波器对相关峰的影响
由3.2(1)的分析可知,带通巴特沃兹滤波器在通带边缘处群时延特性波动较大,故如果采用较宽频带的滤波器则可以有效解决带通滤波器通带边缘有较大起伏的群时延影响,通带分别为40 MHz、44 MHz、48 Hz的带通滤波器群时延特性如图5。
由仿真可知通过适当加宽滤波器带宽,可以较好地控制有效通带内群时延波动,4阶48 MHz带宽滤波器,其40 MHz有效通带内其群时延波动可控制在1 ns。
现采用20.46 MHz的扩频码,将其调制在频率为25.02 MHz的中频载波上,并使其通过4阶巴特沃兹滤波器,取滤波器带宽分别为40 MHz、46 MHz、48 MHz。解调后与相同序列的本地码做相关,同时做一组实验对比,即将上述扩频码调制在频率为25.02 MHz的中频载波上,解调后与相同序列的本地码做相关,分别得到相关函数对比图如图6。
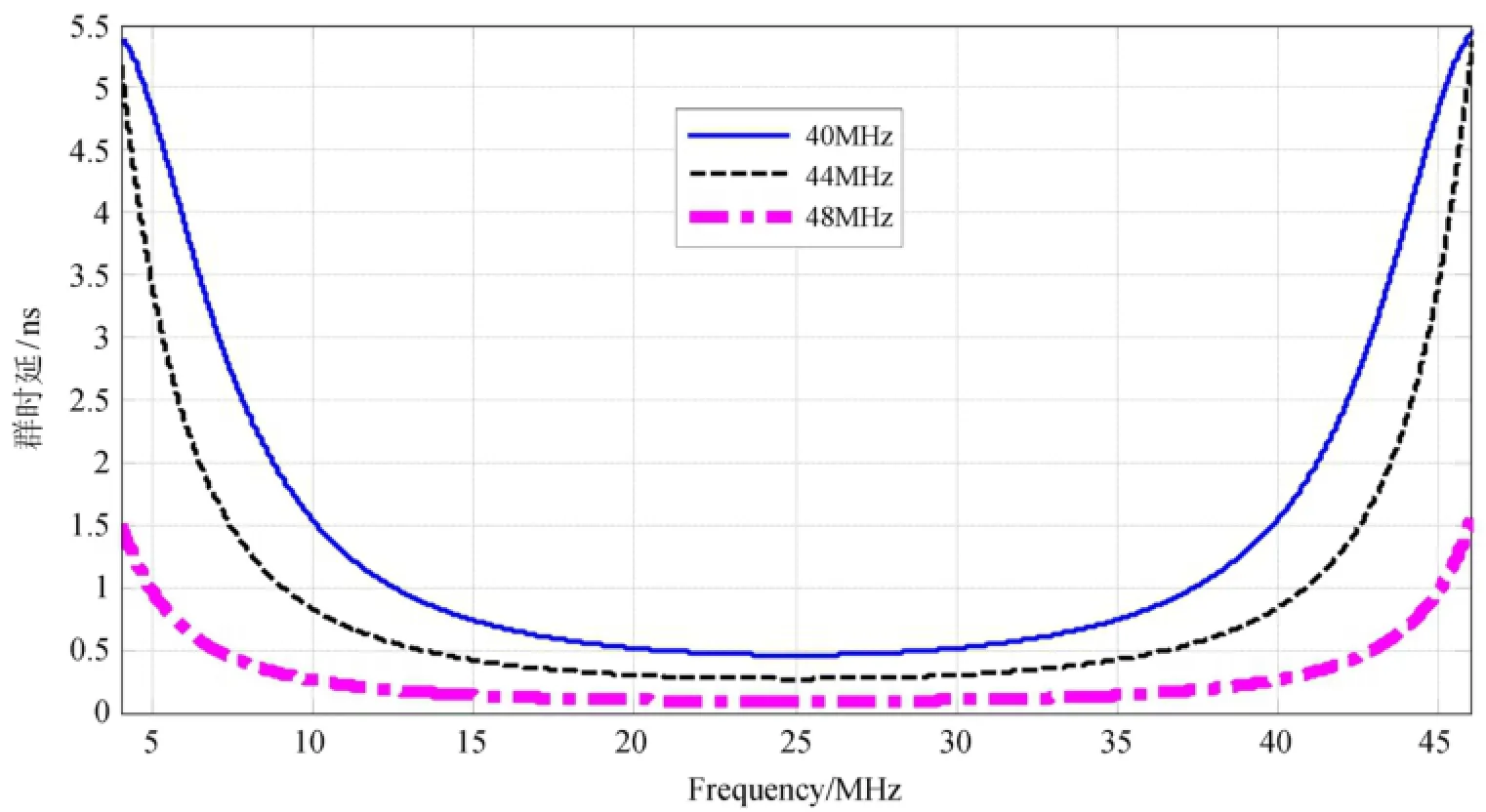
图5 不同带宽滤波器的群时延特性对比Fig.5 Comparison of group delays of filters of different bandwidths

图6 不同带宽滤波器造成的相关函数波形图对比Fig.6 Comparison of the wave forms of the correlation functions of using filters of different bandwidths
由上述仿真对比可知滤波器带宽越宽,所得相关函数波形畸变越小,即越接近无群时延误差的情形。故在硬件设计时可以考虑使用滤波器带宽稍大于信号带宽,以达到减小群时延影响的目的。但同时无限制地加大滤波器带宽亦会造成接收机噪声精度的下降,所以这也是设计接收机过程中需要权衡的。
本文通过对接收机信号跟踪及处理原理的分析,对定位误差的估算作了理论分析以及仿真实验,从滤波器的角度对卫星导航系统超宽频测距码的群时延的优化设计,得出结论:
(1)在中频处,较低阶数的巴特沃兹滤波器具有较为良好的群时延特性;
(2)设计中频带通滤波器时,滤波器带宽应稍大于超宽频信号带宽,以此可以减小群时延误差,但滤波器带宽的增大应在一定范围内。
如何进一步消除群时延对高速率测距码伪距的影响是下一步研究的重点。同时,本文仅从群时延产生测距误差的角度进行了分析与研究,从而给接收机的设计提供参考依据,并未考虑其他因素,比如接收机噪声误差的消除、多径误差的消除,以及硬件实现的难易程度,故综合考虑上述因素以实现接收机性能最佳,实现简单的效果亦是下一步研究的重点。
参考文献:
[1] 艾国祥,施浒立,吴海涛,等.基于通信卫星的定位系统原理[J].中国科学(G辑):物理学力学天文学,2008,38(12):1615-1633.
[2] 朱祥维,李垣陵,雍少为,等.群时延的新概念、测量方法及其应用[J].电子学报,2008,36(9):1819-1823.
Zhu Xiangwei,Li Yuanling,Yong Shaowei,et al.A new definition,measurement method of group delay and its application[J].Acta Electronica Sinica,2008,36(9):1819-1823.
[3] 余宜珂,郭伟,马利华,等.一种基于CAPS系统的超宽频测距码的研究[J].遥测遥控,2014,35(3):24-28.
Yu Yike,Guo Wei,Ma Lihua,et al.Research on super broad code based on CAPS[J]. Journal of Telemetry,Tracking and Command,2014,35(3):24-28.
[4] 朱峰,李孝辉,王国永.滤波器群时延分析及其对导航信号的影响[J].电子测量技术,2013,36(5):54-57.
Zhu Feng,Li Xiaohui,Wang Guoyong.Analysis of the filter group delay and its impact on navigation signal[J].Electronic Measurement Technology,2013,36(5):54-57.
[5] 钱世杰,帅涛,李国通.滤波器群时延对伪距测量的影响[J].遥测遥控,2012,33(5):41-46.
Qian Shijie,Shuai Tao,Li Guotong.Impact of the filter groupdelay on the pseudo-range measurement[J].Journal of Telemetry,Tracking and Command,2012,33(5):41-46.
[6] 谢钢.GPS原理与接收机设计[M].电子工业出版社,2009.
[7] Misra P,Enge P.Global Positioning System:Signal,Measurements,and Performance[M]. Rev.2nd ed.Publish House of Electronics Industry,2009.
[8] Kaplan E D,Hegarty C J.Understanding GPS:Principles and Applications[M].2nd ed. America,2006.
A Study of Pseudo-Range Errors Induced by Group Delays of Intermediate-Frequency Bandpass Filters in the CAPS
Yu Yike1,2,3,Yang Jianqing1,3
(1.National Time Service Center,Chinese Academy of Sciences,Lintong 710600,China,Email:994341339@qq.com;2.National Astronomical Observatories,Chinese Academy of Sciences,Beijing 100012,China;3.University of Chinese Academy of Sciences,Beijing 100049,China)
A Bandpass Filter(BPF)is an important component of the receiver in the Chinese Area Positioning System(CAPS).Group delays,especially those of wide-frequency ranging codes,are among the major sources of pseudo-range measurement errors.In this paper we present certain analyses of the principle of tracking and processing code signals.We subsequently derive the theoretical formula of a pseudo-range error and describe simulations of effects of a BPF.Based on these we have studied an approach to optimize group delays to improve the design of the CAPS receiver.The results of our study can provide useful references for the design of the GNSS receiver.
Chinese Area Positioning System(CAPS);BPF;Receiver;Group delay;Pseudo-range measurement
TN96
A
1672-7673(2014)04-0356-06
2014-01-28;
2014-02-26
余宜珂,男,硕士.研究方向:卫星导航.Email:994341339@qq.com
