行星光学远程着陆模拟器光学系统设计
2014-04-30乔彦峰
唐 杰,蔡 盛,乔彦峰
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
行星光学远程着陆模拟器光学系统设计
唐 杰*,蔡 盛,乔彦峰
(中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033)
为了实现对行星光学远程着陆过程的光学模拟以及满足行星光学远程着陆系统导航算法的地面测试需求,提出了以商用投影仪显示系统为基础的模拟器光学系统方案,重点阐述了系统的光学设计思想,并给出了设计结果。首先,介绍了模拟器的工作原理和系统组成,在此基础上,由技术要求及所选择的投影仪和CCD参数确定了投影镜头和成像镜头的光学系统指标,最后给出了投影镜头、成像镜头及系统对接的光学结构图,像差曲线、点列图和MTF曲线图。仿真分析结果表明:系统的点列图中的弥散斑对称性都很好,有利于模拟器系统的后续图像处理和判读,同时系统在Nyquist频率(91 lp/mm)处的MTF设计值接近0.6,系统整体成像性能良好。设计结果可作为研制行星光学远程着陆模拟器系统的基础。
模拟器;光学系统设计;光学远程着陆
1 引言
随着人类社会经济的不断发展和科学技术的进步,深空探测已成为空间科学研究的重要内容,行星探测则是目前深空探测所关注的重点,一直受到各国家和航天机构的支持,行星探测的次数和任务规划相比于其它深空探测的对象也是最多的。早期行星探测的主要方式是飞越和绕飞,随着技术进步以及为了对目标行星进行实地考察和采样,着陆方式的行星探测已成为主要探测方式选择。
由于目标行星与地球的距离遥远,导致地面测控站所发出的测控信息的传输出现大时滞,难以实现对着陆过程进行实时测控。同时,由于存在初始确定误差以及惯性测量单元常值漂移偏差,采用惯导单元的导航方式存在累计误差无界的缺陷,最终带来落点偏差过大的结果(落点误差椭圆半径均在100~300 km的量级),很难满足未来行星表面精确着陆任务的需求。因此,有必要发展新一代的基于光学测量的高度自主导航与制导技术来实现行星表面精确着陆[1-4]。
在基于光学测量的高度自主导航与制导技术的研究过程中,为保证光学远程着陆系统的整体性能,必须对各项指标进行详细而准确的测试和验证,受到测试条件以及测试手段的限制,常规地面测试只能对成像系统的技术指标、性能进行简单的测试,若想对成像效果以及算法进行测试需要提供目标的动态图像,即利用“星模拟器”对“星敏感器”在地面进行检测标定。关于星敏感器及星模拟器的研究在国内开展的较为广泛,目前主要集中在如何实现大视场星敏感器及高精度地面标定技术,采用新型光源的星模拟器等方面[5-14]。为实现对光学远程自主着陆系统的模拟并进行算法验证,本文采用了一种以商用投影仪显示系统为核心部件的模拟器方案,根据模拟器的特点设计了一种透射式投影镜头,其出瞳位于光学系统的外部,出射光线为平行光出射,以方便与相应的成像镜头光学对接,系统光谱范围为可见光。
2 工作原理
行星光学远程着陆模拟器主要由图像模拟生成系统和图像接收处理系统组成(见图1),其中图像模拟生成系统拟在成熟的商用投影仪基础上,采用重新设计的投影镜头,以数字微镜阵列(Digital Micro-mirror Device,DMD)作为动态景象生成器,将其投影到无穷远处,即模拟无穷远目标(远程着陆)。图像接收系统利用成像镜头对图像模拟生成系统形成的模拟目标进行成像,通过CCD采集和图像采集卡将图像存储在PC机上,并进行解算。
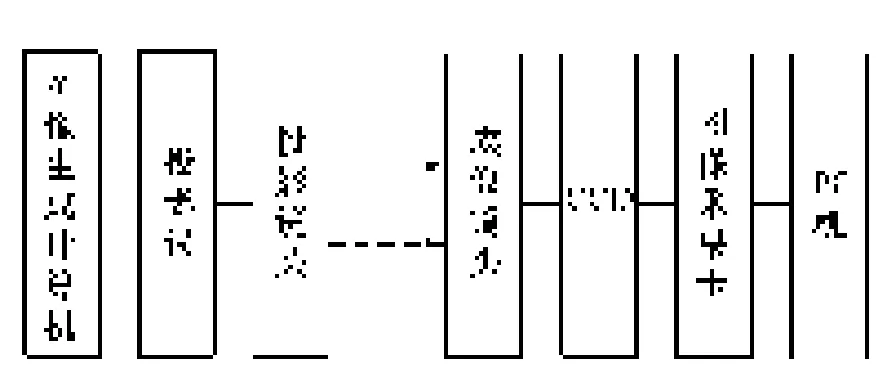
图1 系统组成Fig.1 Components of system
3 技术要求及指标分析
3.1 技术要求
行星光学远程着陆模拟器系统的设计原则实现对行星远程自主着陆过程进行模拟,重点是能够实现对自主着陆导航算法进行验证。根据行星光学远程自主着陆系统的规划,对模拟器系统的主要要求如下:
(1)模拟器系统畸变测试优于千分之一;
(2)行星着陆远程光学环境成像分辨率不小于1 024×1 024;
(3)探测目标星等优于5等星;
(4)远程光学环境图像分辨率不小于1 280× 768;
(5)远程光学环境图像对比度不小于5 000∶1;
(6)行星远程着陆光学模拟设备通光孔径不小于直径60 mm。
3.2 指标分析
为满足3.1中(4)和(5)的要求,选用优派投影仪7820HD,其标配镜头和DMD参数如下:
(1)焦距(实测值):19.2~25.7 mm;
(2)F数:2~2.57;
(3)镜头安装基面距DMD距离(实测):37 mm;
(4)型号:0.65”LVDS S600 1080p;
(5)分辨率:1 920×1 080;
(6)像元大小:7.5 μm;
(7)偏移量:120%。
根据3.2中(2)的要求,选择的CCD相机参数如下:
(1)像元大小:5.5 μm;
(2)分辨率:1 024×1 024;
(3)接口类型:C口。
根据所选择的投影仪和CCD相关参数,以及3.2中(6)的要求,可以确定投影镜头的主要光学系统参数如下:
(1)入瞳直径:60 mm;
(2)焦距:150 mm;
(3)视场:像高大于12 mm;
(4)后工作距BFL:大于40 mm。
其中视场的确定依据是DMD的大小及偏置放置,如图2所示,由于DMD是偏置放置,同时考虑到投影镜头的安装方便,将投影镜头的视场范围规划为以投影仪标配镜头的中心,即O点为轴上点,投影仪的视场可由式(1)计算得到。
此时,可将投影镜头整体倾斜一定角度来实现成像镜头与投影镜头的对接,相应的成像镜头的设计参数如下:

图2 DMD偏置示意图Fig.2 Schematic diagram of offset of DMD
(1)入瞳直径:40 mm;
(2)焦距:110 mm;
(3)视场:像高大于2.816 mm;
(4)后工作距BFL:大于17.526 mm。
4 光学设计结果
4.1 投影镜头
根据上述投影镜头的主要光学系统参数,选择双高斯为基本结构型式[15-17],考虑到方便和成像镜头的光学对接,将标准双高斯的光阑位置由中间调整到最前面,这样就破坏了双高斯镜头原有的对称性,为了有利于像差的校正,加入了两个单片,最终的光学结构图如图3所示。

图3 投影镜头光学结构图Fig.3 Optical system of projective lens
图4为投影镜头的像差曲线,球差和轴向色差都不大,1.0视场以内的像散和场曲都很小,全视场基本无畸变。
图5为投影镜头的光学传递函数(MTF)曲线,计算的波长为486.1、587.6、656.3 nm,权重1∶1∶1,空间频率0~70 lp/mm,设计值接近衍射极限。图6为系统的点列图,0.85视场内星点的形状对称性都很好。
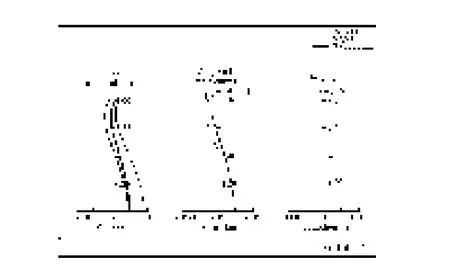
图4 投影镜头像差曲线Fig.4 Aberration curves of projective lens
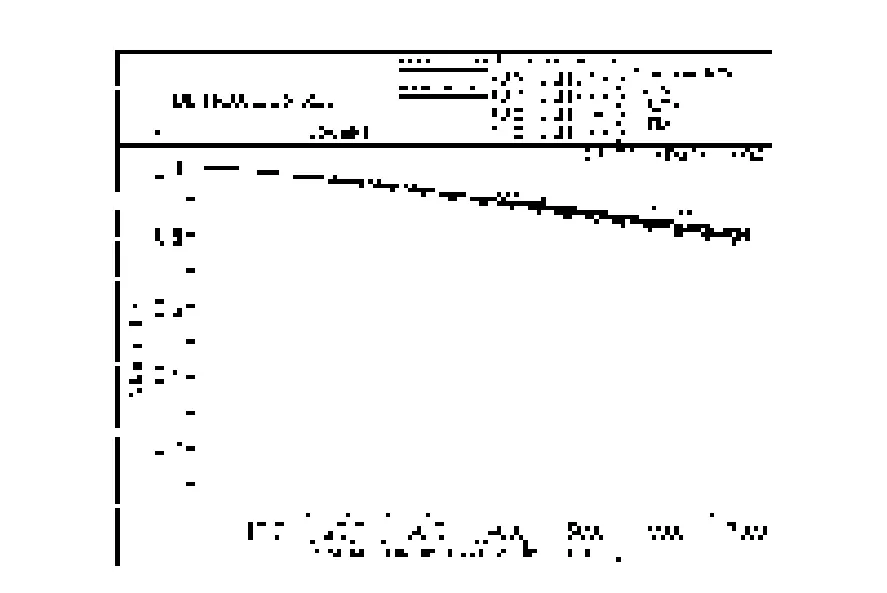
图5 投影镜头光学传递函数曲线图Fig.5 Modulation transfer function curves of projective lens
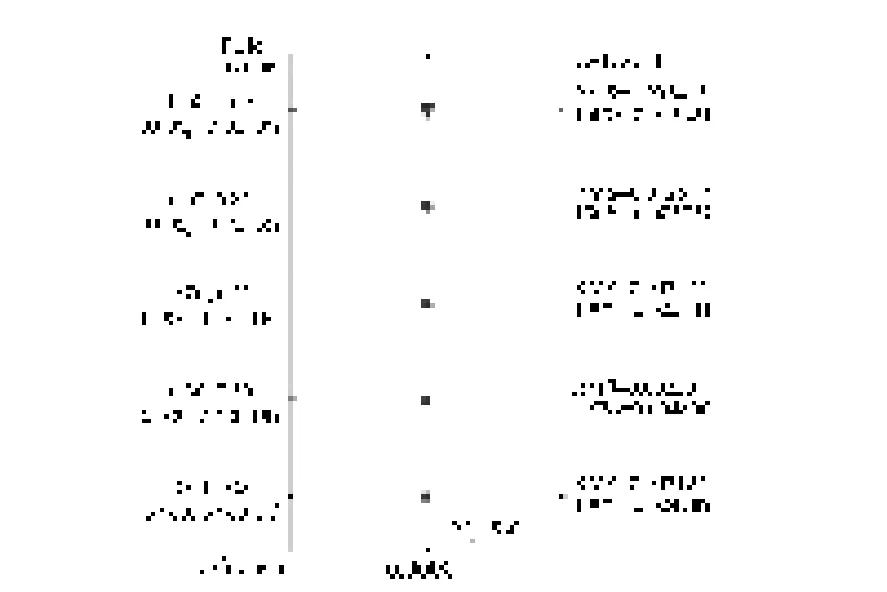
图6 投影镜头点列图Fig.6 Spot diagram of projective lens
4.2 成像镜头
成像镜头选择与投影镜头类似的结构型式,由于它的视场较投影镜头要小,在双高斯结构的基础上只增加了1个单片就实现了像差的校正,系统结构图如图7所示。
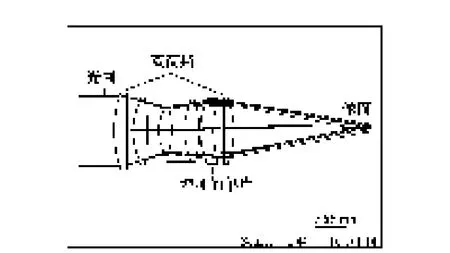
图7 成像镜头光学结构图Fig.7 Optical system of imaging lens
图8为成像镜头的像差曲线,球差和轴向色差都不大,1.0视场以内的像散和场曲都很小,全视场基本无畸变。
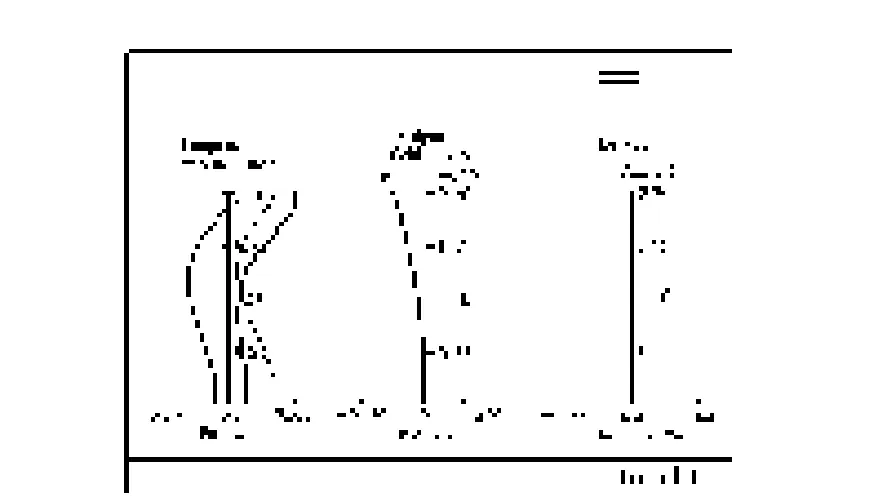
图8 成像镜头像差曲线Fig.8 Aberration curves of imaging lens
图9为成像镜头的MTF曲线,计算的波长同投影镜头,空间频率0~100 lp/mm,MTF值均在0.6以上。图10为系统的点列图,1.0视场内星点的形状对称性都很好。
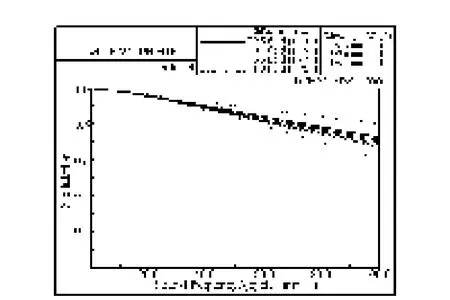
图9 成像镜头光学传递函数曲线图Fig.9 Modulation transfer function curves of imaging lens

图10 成像镜头点列图Fig.10 Spot diagram of imaging lens
4.3 投影镜头与成像镜头对接
根据3.2中的分析,由于DMD的偏置,为了实现成像镜头整体倾斜2.085°,实际上DMD的分辨率大于模拟器系统要求的环境图像分辨率,该倾斜角度可随着实际使用的DMD区域进行微调,从而实现CCD像素点与DMD像素点的一一对应。整个模拟器光学系统图如图11所示。
图11 模拟器光学系统图Fig.11 Optical system of simulator
图12为模拟器系统的MTF曲线,计算的波长同投影镜头,空间频率0~100 lp/mm,MTF值均在0.5以上。图13为系统的点列图,视场内星点的形状对称性都很好,有利于后续图像处理。并且光线追迹结果表明,由DMD发出的图像成像在CCD上的实际位置与理想位置最大偏离量为3.8 μm,小于1个像素,相对畸变小于1%,满足3.1中(1)的要求。

图12 模拟器光学传递函数曲线图Fig.12 Modulation transfer function curves of simulator

图13 系统点列图Fig.13 Spot diagram of simulator
5 结论
本文以实现行星光学远程着陆模拟为出发点,介绍了模拟器的工作原理,提出了以商用投影仪显示系统为基础的模拟器光学系统方案,分析了系统技术要求并进行光学系统指标分析,给出了投影镜头、成像镜头及系统对接的光学结构图,像差曲线、点列图和MTF曲线图表明,模拟器光学系统的光学性能良好,模拟器系统在Nyquist频率处91 lp/mm的MTF设计值接近0.6,设计结果可作为研制行星光学远程着陆模拟器系统的基础。
[1]李爽.基于光学测量的相对导航方法及在星际着陆中的应用研究[D].哈尔滨:哈尔滨工业大学,2007.
LI SH.Study on optical measurement based relative navigation and its application in planetary landing[D].Harbin:Harbin Institute of Technology,2007.(in Chinese)
[2]高艾.基于光学信息的行星自主着陆鲁棒估计与制导方法研究[D].哈尔滨:哈尔滨工业大学,2012.
GAO A.Study on robust estimation and guidance for autonomous landing on planets based on optical navigation[D].Harbin:Harbin Institute of Technology,2012.(in Chinese)
[3]王维,董吉洪,孟庆宇.火星探测可见光遥感相机的发展现状与趋势[J].中国光学,2014,7(2):208-214.
WANG W,DONG J H,MENG Q Y.Current status and developing tendency of visible spectral remote sensing camera for mars observation[J].Chinese Optics,2014,7(2):208-214.(in Chinese)
[4]马鹏斌,宝音贺西,沐俊山.利用火星卫星光学测量实现火星探测器自主导航[J].光学精密工程,2014,22(4):863-869.
MA P B,BAOYIN H X,MU J SH.Autonomous navigation of Mars probe based on optical observation of Martian moon[J].Opt.Precision Eng.,2014,22(4):863-869.(in Chinese)
[5]吕伟振,刘伟奇,魏忠伦.大屏幕投影显示光学系统的超薄化设计[J].光学精密工程,2014,22(8):2020-2025.
LYU W ZH,LIU W Q,WEI ZH L.Design of ultra-thin optical systems in large screen projection display[J].Opt.Precision Eng.,2014,22(8):2020-2025.(in Chinese)
[6]魏忠伦,刘伟奇,柳华.动态目标模拟器用视景仿真镜头光学设计[J].应用光学,2013,34(1):26-31.
WEI ZH L,LIU W Q,LIU H.Optical design of visual simulation lens for dynamic target simulator[J].J.Applied Optics,2013,34(1):26-31.(in Chinese)
[7]吕银环,张涛,童广辉.大视场可见光目标模拟器光学系统设计[J].光电工程,2012,39(6):85-90.
LU Y H,ZHANG T,TONG G H.An optical system design with a large-field visible light target simulator[J].Opto-Electronic Engineering,2012,39(6):85-90.(in Chinese)
[8]陈启蒙,张国玉,王哲,等.大视场高精度静态星模拟器的光学系统设计[J].激光与光电子学进展,2014,51(5):052202.
CHEN Q M,ZHANG G Y,WANG ZH,et al..Optical system design of high-precision static star simulator with large field of view[J].Laser Optoelectronics Progress,2014,51(5):052202.(in Chinese)
[9]李璟,杨宝喜,胡中华,等.星敏感器光学系统的研制与性能测试[J].光学学报,2013,33(5):0522005.
LI J,YANG B X,HU ZH H,et al..Development and performance testing of optical system for star sensor[J].Acta Optica Sinica,2013,33(5):0522005.(in Chinese)
[10]孙高飞,张国玉,高玉军,等.星敏感器地面标定设备的设计[J].红外与激光工程,2013,42(10):2822-2827.
SUN G F,ZHANG G Y,GAO Y J,et al..Design of star sensor ground calibration equipment[J].Infrared and Laser Eng.,2013,42(5):2822-2827.(in Chinese)
[11]陈启梦,张国玉,王凌云,等.高精度星敏感器测试设备的设计[J].红外与激光工程,2014,43(7):2234-2239.
CHEN Q M,ZHANG G Y,WANG L Y,et al..Test equipment design of high precision star sensor[J].Infrared and Laser Engineering,2014,43(7):2234-2239.(in Chinese)
[12]马强,张涛.星等及光谱可调的标定用单星模拟器系统设计[J].应用光学,2014,35(1):38-42.
MA Q,ZHANG T.Single star simulator with adjustable magnitude and spectrum for calibration[J].J Applied Optics,2014,35(1):38-42.(in Chinese)
[13]贺鹏举,梁斌,张涛,等.大视场星敏感器标定技术研究[J].光学学报,2011,31(10):1023001.
HE P J,LIANG B,ZHANG T,et al..Calibraiton method for wide field of view star sensor[J].Acta Optica Sinica,2011,31(10):1023001.(in Chinese)
[14]胡文刚,元雄,何永强,等.基于DMD中波红外场景仿真系统光源温度的研究[J].红外技术,2014,36(8):661-664.
HU W G,YUAN Y,HE Y Q,et al..Research on light source temperature-scope in the mid-wave infrared scene simulation system based on DMD[J].Infrared Technology,2014,36(8):661-664.(in Chinese)
[15]张树青,王敬洋,王冶乐,等.红外多目标复合仿真光学系统设计[J].光学精密工程,2014,22(6):1454-1460.
ZHANG SH Q,WANG J Y,WANG Y L,et al..Design of infrared optical system for mulit-target compounded simulator[J].Opt.Precision Eng.,2014,22(6):1454-1460.(in Chinese)
[16]李航,颜昌翔.800万像素手机广角镜头设计[J].中国光学,2014,7(3):456-461.
LI H,YAN CH X.Design of wide-angle lens for 8 mega-pixel mobile phone camera[J].Chinese Optics,2014,7(3):456-461.(in Chinese)
[17]史光辉,杨威.用于图像拼接的电视摄像光学系统[J].中国光学,2014,7(4):638-643.
SHI G H,YANG W.Optical system used to compose images in television photograph[J].Chinese Optics,2014,7(4):638-643.(in Chinese)
[18]胡际先,党晨郎.两档变焦测量电视光学系统的设计[J].光学与光电技术,2013,12(6):93-96.
HU J X,DANG CH L.Design of Swith-Zoom TV measuring optical system[J].Optics Optoelectronic Technology,2013,12(6):93-96.(in Chinese)
Optical system design of simulator for autonomous landing on planets based on optical navigation
TANG Jie*,CAI Sheng,QIAO Yan-feng
(Changchun Institute of Optics Fine Mechanics and Physics,Chinese Academy of Sciences,Changchun 130033,China)
In order to realize the simulation of autonomous landing on planets based on optical navigation and to satisfy the need of ground-based testing for system navigation algorithms,a scheme of simulator based on commercial projector′s projection system is suggested.The idea of optical system design are described especially and the design results are given.First,the working principle and components of system are introduced. Then the optical specifications of projective lens and imaging lens are fixed based on the simulator′s technology demands,projector and CCD selected.Finally,the optical system layouts,aberration curves,spot diagrams and modulation transfer functions(MTF)are showed.Simulation results indicate that the symmetry of spot diagrams is well to satisfy the demand of image processing and judgments,and the design value of MTF is close to 0.6 at the Nyquist frequency(91 lp/mm)and the imaging performance of system is good.The design results can be used for the following manufacture of simulator for autonomous landing on planets based on opticalnavigation.
simulator;optical system design;autonomous landing based on optical navigation
V448.22;TP394.1;TH703
A
10.3788/CO.20140706.0962
2095-1531(2014)06-0962-07

唐 杰(1964—),男,吉林长春人,研究员,主要从事光电测量技术方面的研究。E-mail:13943196096@139.com

蔡 盛(1983—),男,湖北武穴人,博士,副研究员,主要从事光电测量及靶场光学成像测量方面的研究。E-mail:cais-ciomp@hotmail.com

乔彦峰(1962—),男,吉林长春人,研究员,主要从事光电测量技术方面的研究。E-mail:qiaoyf@ciomp.ac.cn
2014-08-21;
2014-10-19
国家重点基础研究发展计划(973计划)资助项目(No.2012CB720000)
*Corresponding author,E-mail:13943196096@139.com
