星载光电捕获跟踪瞄准控制技术分析
2014-04-30王卫兵王挺峰
王卫兵,王挺峰,郭 劲
(中国科学院 长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林 长春 130033)
星载光电捕获跟踪瞄准控制技术分析
王卫兵*,王挺峰,郭 劲
(中国科学院 长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林 长春 130033)
本文以天基监视为研究背景,主要围绕星载光电捕获跟踪瞄准(ATP)控制技术展开研究,针对卫星调姿变轨和跟踪架转动的多自由度配合控制过程,依次对天基监视物理模型、星载光电ATP控制系统方案和电视跟踪精度进行了分析。通过分析,不仅对这种多阶段多任务多模式切换的ATP控制有了较为清晰的理解,而且对其中所涉及的关键技术获得了较为全面的认识,对星载光电ATP控制系统设计有一定的指导意义。
天基监视;星载光电ATP控制系统;卫星调姿变轨;光电跟踪架
1 引言
随着航天器和有效载荷的发展,侦察卫星、通信卫星、实验卫星、空间站、航天飞机等空间应用系统研究已成为研究的热点,同时空间存在大量的碎片垃圾。无论出于民用,还是军用,将类似于地面经纬仪的光学成像跟踪设备应用在天基探测系统中具有重要价值。在“天基空间目标监视系统”(SBSS)、“空间跟踪与监视系统”(STSS)、“持续跟踪与监视系统”(PTSS)、天文望远镜系统及激光应用系统中,都出现了这种光电跟踪设备。
对光学成像跟踪设备而言,光电捕获跟踪瞄准(ATP)控制技术是一项系统性技术,对测量、激光等应用系统至关重要。另外,在两星交会对接的末段过程,常采用光学相机导引方式,但这是一个固连在卫星平台上的静止测量方式。若将光学相机置于跟踪架上,同时提高卫星机动能力,则可构成一种基于光电跟踪设备的天基动能追踪器,其功能类似于弹载光学导引头的目标追踪器,只是应用环境不同而已,且主要包括卫星变轨控制、卫星调姿控制、光学导引头轴系转角控制等环节。
因此,研究星载光电ATP控制技术对于天基监视、测量、追踪、激光通信等应用系统具有重要意义。而目前的研究主要集中在激光通信系统中的应用[1-3],适用于合作目标;只有少量文献报道在天基监视[4-8]、测量、追踪等系统中的应用,可适用于合作、非合作目标。由于天基监视、测量、追踪系统均有类似的电视成像测量能力,本文主要以天基监视为背景,对星载光电ATP控制技术进行了简要而完整的分析。首先,简要介绍了天基监视物理模型,包括卫星平台、跟踪转台、目标特性;其次,全面分析了星载光电ATP控制系统方案,包括卫星变轨调姿控制系统、两轴跟踪架转动控制系统及如何实现快速捕获、稳定跟踪和精确瞄准控制的工作过程;然后,分析了电视跟踪过程中的跟踪精度影响因素;最后,总结了星载光电ATP系统所涉及的关键技术。
2 天基监视物理模型
天基监视系统主要由监视卫星、星载光电跟踪设备和辅助测量设备构成。监视卫星在设计的地球轨道运动,若知道目标运动信息或目标运动区域时,且当光电跟踪设备转动能力受限时,可配合监视卫星变轨调姿,可通过辅助测量设备解算的数引信息或自主扫描搜索完成目标的快速捕获过程。当运动目标出现在跟踪设备的光学成像视场内后,通过图像处理和目标识别后,切换至电视脱靶量自动稳定跟踪阶段。当系统做测量设备用或配合激光应用设备时,可设计相应的跟踪控制系统方案,以实现视轴的高精度瞄准。如何使星载光电跟踪系统完成从快速捕获到稳定跟踪到精确瞄准的过程,是本文研究的重点。
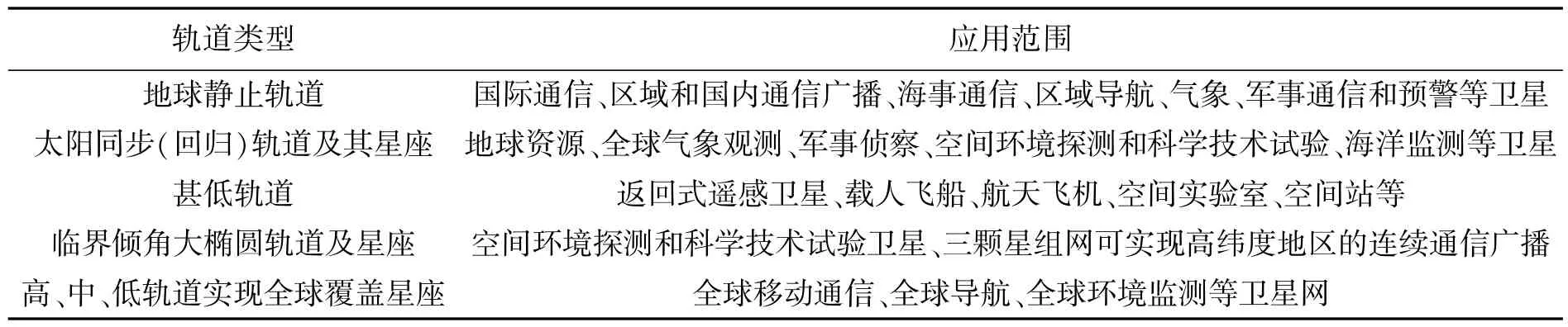
表1 不同轨道高度和不同用途的航天器Tab.1 Different usage of spacecraft in different altitude
2.1 卫星平台
航天器可分为无人航天器和载人航天器,其中卫星是一种在空间轨道上环绕地球运行的无人航天器,其发射数量占航天器发射总数的90%以上,按照用途可分为科学卫星、技术试验卫星和应用卫星[9]。目前绕地球运行的航天器在不同的轨道高度有不同的用途,如表1所示,因此要实现对这些区域航天器以及空间碎片的监视,需要设计其相应轨道附近的天基监视卫星。美国SBSS设计在太阳同步轨道附近,STSS和PTSS均设计在低轨部分。SBSS系统在轨示意图如图1所示。
图1 天基监视卫星在轨运行示意图Fig.1 Skematic diagram of SBSS flying in obits
2.2 跟踪转台
跟踪架可分为两轴、三轴、四轴结构,目前由于两轴式跟踪架结构简单,易于控制,应用较为普遍。两轴式根据跟踪架结构又可分为地平式和水平式,前者又可分为U型架和T型架,图1中的SBSS系统采用为地平式U型跟踪架结构,图2为水平式跟踪结构。目前采用U型结构架较多,其中地平式跟踪时会存在天顶盲区,水平式跟踪时可避免天顶盲区。但是由于机械结构的限位,地平式比水平式的可跟踪范围大,前者的外轴系(方位轴)转动范围为360°,内轴系(俯仰轴)转动范围为180°;而后者的外轴系转动范围为180°,内轴系转动范围小于180°。SBSS、STSS系统中使用的是U型跟踪架结构。
2.3 运动信号
假设两颗共面卫星运行轨道不受任何控制力和摄动力,地球为质量均匀的圆球,则两颗卫星的固定椭圆轨道可近似为圆轨道,即对应的两卫星做共面自由圆轨道运行。利用几何关系对两共面圆轨卫星的相对运动角度计算结果表明,两星相对运动过程可近似为低速运动过程,即监视卫星对目标卫星的跟踪过程可等效为低速跟踪过程。
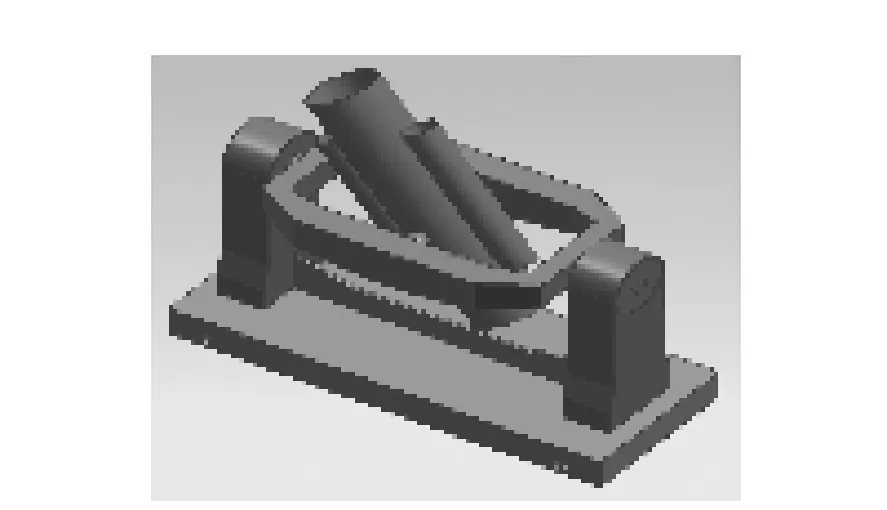
图2 水平式两轴式跟踪架结构Fig.2 Two-axis tracking frame structure with horizontal style
通过分析,目标卫星的摄动和振动对视轴稳定的影响可忽略不计,只考虑监视卫星的摄动和振动对视轴稳定的影响。其中低频摄动信号主要包括地球非球形引力、月球引力、太阳引力、太阳辐射压力、太阳反照压力、大气阻力和地球潮汐力等因素引起的扰动信号,中高频振动信号主要包括波导开关、推进器动作、太阳能电池组驱动等因素引起的扰动信号,具体形式可用功率谱图描述[10]。
从信号形式上分析,两星相对运动信号为高幅低频形式(包括其他大机动跟踪目标情况,可用等效正弦信号描述),星载平台振动信号为低幅中高频形式(由于作用距离较远,考虑到监视卫星视轴跟踪目标视线,可忽略目标的摄动振动等扰动影响)。
3 星载光电捕获跟踪瞄准(ATP)控制系统
卫星整体不仅受地球引力作用而绕地球运动,同时运行轨迹还会受到其他摄动力影响,可用6个根轨道数描述;而且卫星自身还可绕内部轴系转动,同时卫星内部一些器件运动会引起平台振动,可用3个姿态角描述,固连在卫星平台上的跟踪架还可绕自身轴系转动,视轴与内轴系重合,并嵌套于外轴系,可用2个角度脱靶量和2个轴系转动角度描述。在整个星载光电ATP控制过程中,不仅卫星可做调姿变轨运动,而且跟踪架自身也可实时转动,这其中每个环节的变化都会影响到光学视轴的指向。因此,卫星变轨调姿和跟踪架转动均可调整光学视轴指向,采取单一方式、或两者、三者配合方式,在某些条件下均可能实现ATP能力。
从自由度分析角度看,可控自由度越多,工作能力范围越大,但系统控制难度越大,成本越高。因此,从功耗和控制难易程度讲,变轨、调姿和跟踪架轴系逐渐容易,实际中应该考虑跟踪架调角、卫星调姿、卫星变轨的优先顺序,当跟踪架转角进行快速捕获和稳定跟踪过程中由于机械结构受限时,需要卫星调姿配合,当星载光学系统作用距离受限时,需要卫星变轨配合。由此构成的星载ATP控制系统方案如图3所示,其中针对不同阶段性能要求不同,控制系统有所不同,而且不同阶段之间过渡时,也存在一个切换过程,因此星载ATP控制系统方案是一种多模控制方案。另外,要成功实现星载ATP功能,需要解算测量信息,获得视轴指向与目标视线相对夹角,以便指挥控制系统结合星载平台实际情况判断采用何种方式(如判断是否需要卫星变轨和调姿等)实现星载ATP能力,而这些解算过程均需要统一标定的坐标体系,如图4所示。
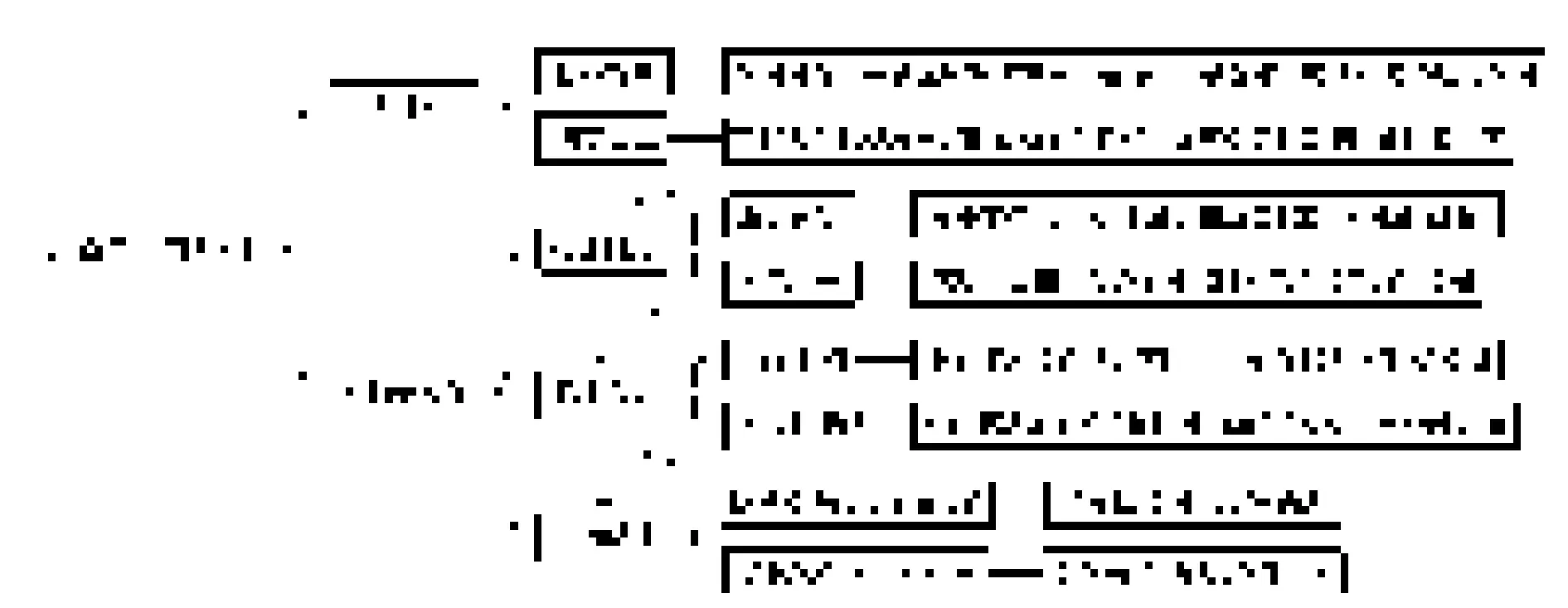
图3 星载光电ATP控制系统Fig.3 Opto-electrical ATP control system on satellite

图4 星载光电ATP控制系统坐标体系Fig.4 Coordinates of opto-electrical ATP control system on satellite
卫星调姿变轨控制系统及其敏感器和执行器分别如图5(a)、(b)所示,两轴跟踪架控制系统及其测量传感器和执行器分别如图6(a)、(b)所示。与有刷直流电机相比,虽然无刷直流电机不仅电机内部转子与定子结构机理不同,而且需要位置传感器,电子线路较为复杂,但是没有电刷,不考虑空间环境下电刷磨损寿命和高真空中电刷易打火引起的电磁干扰问题,且电机内部结构的热量容易散发。

图5 卫星调姿变轨控制系统、敏感器和执行器Fig.5 Control system,sensors and performers of adjusting posture and changing trajectory of satellite

图6 两轴跟踪架控制系统、测量传感器和执行器Fig.6 Control system,measurement sensors and performers of two-axis tracking frame
要实现快速捕获,需要设计具有高动态性能(调节时间小、超调量低)的控制系统,如最小节拍组合控制、最小拍纹波控制、时间最优控制等;而要实现高精度跟踪瞄准,需要设计具有高稳态性能(跟踪误差小)的控制系统,无论采用何种经典控制方案,如基于信息融合的共轴跟踪控制、基于惯性陀螺方式的前馈式星载平台扰动抑制控制、基于复合轴方式的高精度视轴跟踪瞄准控制等,两轴跟踪架基本上采用电流速度位置三闭环高精度控制系统[11-12],如图7所示。其中轴系角度传感器可采用高分辨率编码器,电视传感器可采用可见、红外探测器,陀螺可采用光纤陀螺,电流探测器可采用霍尔电流元件,驱动电机可采用无刷直流电机。
图7 单轴系电流速度位置三闭环高精度控制系统Fig.7 Three closed loop and high precision control system of current,velocity and position for one axis
3.2.1 快速捕获
数字引导信息捕获:对于合作目标,可利用雷达探测或卫星导航定位系统获得的目标信息;对于非合作目标,同样可通过雷达探测或其他天地测控组合方式获得的目标信息,将所获信息通过坐标变换解算为相对视轴指向方位的数字引导信息,使得跟踪架将目标快速捕获至视场内,以启动电视自主闭环跟踪过程。从控制学角度理解,快速捕获本质上是一个阶跃响应过程,可用调节时间和超调量等动态性能指标来衡量。
自主开环扫描搜索:若不利用其他测控设备获得的数引信息,按照预先设计的控制规律进行,如矩形、螺旋、矩形螺旋等扫描方式[1],使电视视轴进行自主扫描搜索,一旦目标进入视场,将启动电视自主跟踪过程。自主开环扫描搜索常用在激光通信的初始捕获过程中。
3.2.2 稳定跟踪
通过上述天基监视中运动特性分析,可将摄动和振动导致的卫星姿态变化量作为扰动信息。一般而言,扰动幅度越大,扰动频率越低。对低幅高频信号,可采用平台被动隔振技术;对高幅低中频信号,可采用主动稳定跟踪控制技术。若是在所设计的伺服跟踪控制系统带宽范围内,可在星载动基座情况下获得一定的视轴稳定度。
(1)基于惯性陀螺方式的稳定跟踪控制系统
由于高速旋转陀螺具有保持惯性空间的定轴性、外力矩作用的进动性和动力效应,在车载、舰载、机载、弹载、星载、飞艇等[4-8,13-17]主动稳定跟踪控制系统中获得了广泛应用。这种主动惯性陀螺稳定控制方案根据结构不同主要包括平台式、直接式和捷联式3种方式。
平台式陀螺稳定跟踪控制系统:陀螺位于跟踪架支撑平台,敏感外干扰力矩,可获得跟踪架支撑平台的稳定驱动信号,但这种方式需要比经纬仪外方位轴的控制力矩更大,系统带宽更低,无法对高频信号进行稳定补偿,故此方式不可取。
直接式陀螺稳定跟踪控制系统:陀螺位于跟踪架轴系上,敏感跟踪架方位俯仰轴系信息,可直接获得跟踪架两轴补偿控制信息,目前应用较为普遍。
捷联式陀螺稳定跟踪控制系统:陀螺位于卫星本体或跟踪架平台上,敏感卫星姿态角扰动信息,可间接将陀螺测量信息通过坐标变换解算出相应的跟踪架两轴补偿控制信息,虽然具有体积、重量、功耗、灵活等方面有点,但对陀螺和算法处理能力要求较高,目前还不成熟。
(2)基于光电复合轴方式的稳定跟踪控制系统
从物理学角度分析,控制元件质量越重、体积越大,惯性越大,越难控制,导致控制系统带宽越低;相反,系统带宽越高。无论采用直接式陀螺稳定跟踪系统,还是采用捷联式陀螺稳定跟踪系统,控制元件均为跟踪架轴系,其质量和体积均受光学系统要求限制,且谐振频率也受限于机械结构,因此系统速度环带宽有限,对星载光电跟踪的中高频扰动信号难以抑制,且陀螺存在漂移现象,还需进行标定校准。因此,基于惯性陀螺方式的稳定跟踪控制方案存在一定缺陷。
由于光电成像跟踪过程的本质是系统对目标相对运动的跟踪,因此,星载光电跟踪系统和目标运动特性两个互相独立的过程可通过CCD成像过程看成相对运动过程,即稳定也是跟踪。由此可知这种“动中要跟,跟中有扰”的跟踪输入信号,将包括各种特性的输入信号。理论上,只要设计的控制系统性能优良,基本可对上述的星载光电跟踪模型达到满意的跟踪精度。目前,基于快反镜快速精跟踪的复合轴技术在光电跟踪系统中得到了很好的应用[1-3,17-18]。其物理思想为:一级经纬仪主系统对相对运动目标大信号进行大视场粗跟踪,二级快反镜精跟踪系统对主系统粗跟踪残余误差信号进行小视场精跟踪,主系统和子系统均可对俯仰和方位进行跟踪。根据所用探测器数目可分为单探测器和双探测器两种方式,分别如图8(a)、(b)所示[17-18]。由于前者的主系统与子系统在跟踪视场切换过程中存在图像传感器帧频变化与目标信息丢失的冲突,虽然可通过预测和智能相机控制技术来改善,但是将对相机性能和控制算法要求很高,使其应用受限。而后者具有对图像传感器要求较高。
为了满足子系统的高带宽设计,需要高采样频率的精跟踪传感器,子系统带宽越高,采样频率越高,技术难度越大。为此,国内胡浩军、刘泽金、马佳光提出了针对动基座的基于惯性视轴稳定器的复合轴跟踪控制系统方案[17],并取得了一定实验效果。
图8 复合轴控制系统Fig.8 Compound-axis control system
3.2.3 精确瞄准
与红外电视成像、可见光电视成像相比,激光主动成像技术可实现暗弱背景下目标的高分辨率成像,同时借助于光学系统的激光“猫眼”效应,可增强目标探测概率。另外,利用激光测距获得目标的相对距离信息,并结合跟踪脱靶量获得目标运动的相对角度信息,可获得空间目标的三维运动轨迹,是一种可行的空间目标定轨技术。因此,激光探测将在天基监视中有重要应用。由于激光探测能力受功率、发散角等因素影响,这要求发射激光具有指向控制精度限制。
若采用上述复合轴稳定跟踪控制系统方案,当快反镜精跟踪精度满足激光发散角要求,则可使发射激光沿快反镜逆向照向目标;若采用跟踪架主系统进行粗跟踪,当目标始终在主系统光学视场内,且跟踪脱靶量满足快反镜控制范围时,通过控制快反镜控制激光光束指向,即使主系统光斑脱靶量与目标脱靶量差值尽可能小,以满足此时光束指向相对目标视线夹角,或激光光斑跟踪精度满足激光发散角要求,如图8(c)所示[1]。与上述成像复合轴稳定跟踪控制系统相比,此激光指向复合轴稳定跟踪控制系统的探测器问题可得到解决,因为光斑的质心提取比成像精跟踪质心或形心较为容易。文献[1]已对这种潜望式激光通讯型复合轴跟踪控制系统进行了研究。
4 跟踪精度分析
由于电视成像跟踪具有重要应用,电视跟踪精度是光电跟踪设备的一项重要性能指标[5,7]。跟踪精度有时用一段过程的统计均方根来评价,有时用最大偏差来评价。对于星载光电跟踪瞄准过程,无论采用陀螺稳定控制系统还是采用复合轴控制系统,两轴大体积大惯量跟踪架主系统的跟踪精度也是成功实现复合轴控制技术的基础。
由于整个星载系统的跟踪精度综合效果可等效于视轴指向与目标视线的相对夹角,即体现为电视脱靶量跟踪精度。但是单一的电视脱靶量信息上难以反映两轴跟踪架各环节的影响,为了较为全面地分析跟踪精度,其系统主要环节误差可主要分解为目标信号跟踪误差(两轴跟踪误差和平台扰动抑制误差)、传感器采集误差(CCD特征点提取误差和编码器信号采集误差)、机械轴系误差(视准轴系、内轴系、外轴系机械误差)等。目标跟踪误差与目标运动特性有关,通常对于确定的伺服系统而言,跟踪一定机动目标时,可以达到高精度跟踪,而在跟踪极低速运动目标时,静摩擦现象的存在而使跟踪精度较差,在跟踪高机动目标时,可能超出伺服系统响应能力而难以跟踪。
考虑到空间环境应用,与地面环境相比,虽然整个跟踪架的质量未变,但是由于空间微重力(摄动力)的影响使得轴系接触处的应力分布发生变化,而使得轴系刚度和轴系误差发生变化,空间温度的变化会影响跟踪架材料变形,同样会使得轴系刚度和轴系误差发生变化,一般需温控设备,而刚度的变化将影响到谐振频率,进而会影响伺服控制系统的跟踪误差。另外,辐射环境和温度变化对光学材料和电子元件同样会造成一定影响,进而影响到光学成像脱靶量和传感器测量信号及伺服电控系统的性能,除了温控措施外,还需要一定的保护措施。
5 关键技术
本文主要研究了天基监视中的星载光电ATP控制系统方案,但这是一个系统工程,涉及到光、机、电、算等多学科,包括很多的关键技术[1-8],总结如下:
(1)光、机、电一体化设计:为了对目标进行成像观测,需要有可调光、调焦和成像能力的光学系统;为了提高系统的机动范围和谐振频率,需要对卫星本体、光电跟踪架和辅助设备的机械结构进行合理布局;为了保证系统正常工作,数据流能顺利传输和计算,需要有可靠的电子学系统;因此优良的光机电一体化设计,是实现星载光电ATP控制技术的基础。
(2)空间环境中星载设备的保护:由于空间环境属于高真空微重力、温差变化大环境,且存在大量的太阳、宇宙射线等高能辐射粒子及太空碎片垃圾等危害性物体,将对整个系统性能影响很大。因此对空间特殊环境而言,不仅需要选取特种材料,还需要采取保护膜、温控等措施。
(3)传感器测量信息数据融合:从控制系统原理分析,控制系统输入信息的准确性对控制效果影响很大。分析可知,星载光电ATP控制系统需要采集多种信息(主要包括目标引导信息、监视卫星轨迹信息、监视卫星姿态信息、跟踪架轴角信息、CCD图像信息等),这些信息可通过相应的测量传感器来获取,而且对同一种信息的获取可能来源于多种测量传感器,因此需要采用数据融合方式获得准确有效的信息。
(4)星载光电ATP指挥控制策略:分析可知星载光电ATP控制需根据数据融合的有效信息,结合卫星调姿变轨和跟踪架转动情况,采取多阶段多任务多模式切换控制策略(分析、判断、决策),这需要高性能控制算法和主控系统来处理,即需要设计高性能C4ISR自动化指挥系统。
(5)应用系统拓展:一方面,可将光电跟踪架设计成光电导引头结构,应用在天基动能追踪器上(如交会对接过程中);另一方面,作为一种光电观测设备,或联合其它天基、地基测控网,以获得更全面的空间目标态势感知信息。
6 结束语
将类似于地面经纬仪结构的光电跟踪架应用在卫星动基座平台上对空间运动目标进行天基监视、测量、追踪将成为一个研究热点。本文以天基监视为研究背景,主要围绕天基监视中的星载光电ATP控制技术展开研究。由于实际应用场合不同,卫星变轨调姿和跟踪架转动侧重点不同,从星载光电ATP控制技术分析,卫星变轨主要是为了解决作用距离或作用方位不满足问题,一般应用较少,而卫星调姿主要是为了扩大视轴指向范围(跟踪架机械结构限制),一般在变轨、捕获或过顶跟踪时配合使用。因此,本文简要分析了卫星变轨调姿控制方案,详细分析了星载跟踪架的控制方案,并将二者结合分析了完整的星载ATP控制系统。由此可知,星载光电ATP控制不仅是一个多模切换控制,而且涉及到光机电一体化设计、传感器测量信息融合、指挥控制决策等关键技术,是一项复杂的系统工程。对其所涉及的科学、技术和工程问题,今后须进行更深入系统地研究。
[1]郑燕红.卫星激光通信终端系统捕获瞄准跟踪技术研究[D].哈尔滨:哈尔滨工业大学,2010.
ZHENG Y H.Research on acquisition pointing and tracking of satellite laser communication terminal[D].Harbin:Harbin Institute of Technology,2010.(in Chinese)
[2]李锐,李洪祚,唐雁峰,等.空间光通信复合轴APT系统[J].红外与激光工程,2011,40(7):1333-1336.
LI R,LI H Z,TANG Y F,et al..Compound-axis APT system in space optical communication[J].Infrared and Laser Engineering,2011,40(7):1333-1336.(in Chinese)
[3]付强,姜会林,王晓曼,等.空间激光通信研究现状及发展趋势[J].中国光学,2012,5(2):116-125.
FU Q,JIANG H L,WANG X M,et al..Research status and development trend of space laser communication[J].Chinese Optics,2012,5(2):116-125.(in Chinese)
[4]徐小琴,孙华燕.星载空间目标光电跟踪角速度伺服系统设计[J].光电工程,2004,31(12):8-11.
XU X Q,SUN H Y.Design of a spaceborne angular velocity servo system for electro-optical tracking of space targets[J].Opto-Electronic Engineering,2004,31(12):8-11.(in Chinese)
[5]徐小琴,孙华燕,李松涛.星载光电跟踪系统的组成及其性能指标设计[J].光学仪器,2005,27(3):46-50.
XU X Q,SUN H Y,LI S T.Composing of spaceborne electro-optical tracking system and design of its performance index[J].Optical Instruments,2005,27(3):46-50.(in Chinese)
[6]董永英.星载光电跟踪系统控制技术研究[D].西安:中国科学院西安光学精密机械研究所,2006.
DONG Y Y.Research on electro-optical tracking control technology on satellite[D].Xi′an:Xi′an Institute of Optics and Precision mechanics of Chinese Academy of Sciences,2006.(in Chinese)
[7]廖莎,柴金广,王旭辉.星载光电跟踪系统跟踪精度分析[J].现代电子技术,2008,17:34-36.
LIAO SH,CHAI J G,WANG X H.Analysis for tracking accuracy of a space-borne electro-optical tracking system[J].Modern Electronics Technique,2008,17:34-36.(in Chinese)
[8]刘伟,胡以华,王恩宏,等.星载光电跟踪关键技术研究[J].红外与激光工程,2007,36(9):67-70.
LIU W,HU Y H,WANG E H,et al..Study on key technique of spaceborne electro-optical tracking[J].Infrared and Laser Engineering,2007,36(9):67-70.(in Chinese)
[9]彭成荣.航天器总体设计[M].北京:中国科学技术出版社,2011.
PENG CH R.The System Design of Spacecraft[M].Beijing:Science and Technology Press of China,2011.(in Chinese)
[10]秦莉,杨明.实时精确跟踪瞄准中振动抑制的研究[J].航空动力学报,2009,24(1):235-240.
QIN L,YANG M.Research of vibration suppression in the precision real time pointing and tracking system[J].J.Aerospace Power,2009,24(1):235-240.(in Chinese)
[11]黄永梅,张桐,马佳光,等.高精度跟踪控制系统中电流环控制技术研究[J].光电工程,2005,32(1):16-35.
HUANG Y M,ZHANG T,MA J G,et al..Study on the control of a current loop in a high-accuracy tracking and control system[J].Opto-Electronic Engineering,2005,32(1):16-35.(in Chinese)
[12]韦啟宣.基于DSP的无刷直流电机方波驱动与正弦波驱动研究[D].广州:华南理工大学,2012.
WEI Q X.The research of square wave and sine wave drive for BLDC on DSP[D].Guangzhou:South China University of Technology,2012.(in Chinese)
[13]刘廷霞,王伟国,陈健.车载惯性平台稳定位置解算算法[J].中国光学,2012,5(5):537-543.
LIU T X,WANG W G,CHEN J.Position arithmetic for a vehicular inertial stabilized platform[J].″Chinese Optics,2012,5(5):537-543.(in Chinese)
[14]蔡立华.基于陀螺的舰载光电经纬仪视轴稳定技术研究[D].长春:中国科学院长春光学精密机械与物理研究所,2011.
CAI L H.The research of line of sight of gyro stabilization technology of carrier-based electro-optical theodolite[D]. Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,China,2011.(in Chinese)
[15]黄一,律俊芳,卢广山.机载光电跟瞄平台稳定与跟踪控制方法研究[J].飞机设计,2003,3:38-42.
HUANG Y,LV J F,LU G SH.Research on methods of stabilization&tracking control for an airborne electro-optical tracking&pointing platform[J].Aircraft Design,2003,3:38-42.(in Chinese)
[16]周瑞青,刘新华,史守峡,等.捷联导引头稳定与跟踪技术[M].北京:国防工业出版社,2010.
ZHOU R Q,LIU X H,SHI S X,et al..Stabilization and Tracking Technology of Strapdown Seeker[M].Beijing:National Defense Industry Press,2010.(in Chinese)
[17]胡浩军.运动平台捕获、跟踪与瞄准系统视轴稳定技术研究[D].长沙:国防科学技术大学,2005.
HU H J.Line-of-sight stabilization of acquisition,tracking and pointing system on moving bed[D].Changsha:National University of Defense Technology,2005.(in Chinese)
[18]刘廷霞.光电跟踪系统复合轴伺服控制技术的研究[D].长春:中国科学院长春光学精密机械与物理研究所,2005.
LIU T X.The research of compound-axis servo control technique of O-E tracking system[D].Changchun:Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Sciences,China,2005.(in Chinese)
Analysis for opto-electrical acquisition tracking and pointing control technology on satellite
WANG Wei-bing*,WANG Ting-feng,GUO Jin
(State Key Laboratory of Laser Interaction with Matter,Changchun Institute of Optics,Fine Mechanics and Physics,Chinese Academy of Science,Changchun 130033,China)
In this paper,we take for space-based surveillance as research background,and mainly focus on opto-electrical acquisition tracking and pointing(ATP)control technology.For multi degree of freedom control process including adjusting posture and changing trajectory control of satellite and opto-electrical tracking frame control,physics model of spaced surveillance,opto-electrical ATP control system scheme on satellite and television tracking precision are analyzed respectively.By these analyses,we not only have a clearer understanding of multi stage,multi task and multi mode switching control,but also obtain a more comprehensive understanding of key technologies involved.These analyses have a certain guiding role for design of opto-electrical ATP control system on satellite.
space-based surveillance;opto-electrical acquisition tracking and pointing(ATP)control system on satellite;adjusting posture and changing trajectory of satellite;opto-electrical tracking
V529
A
10.3788/CO.20140706.0879
2095-1531(2014)06-0879-10

王卫兵(1986—),男,陕西杨凌人,硕士,研究实习员,2013年于中国科学院长春光学精密机械与物理研究所获得硕士学位,主要从事星载光电跟踪控制技术与空间目标定轨技术方面的研究。E-mail:wangweibing10@126.com

王挺峰(1977—),男,山东文登人,博士,研究员,硕士生导师,2005年于中国科学院长春光学精密机械与物理研究所获得博士学位,主要从事激光应用技术与光电探测总体技术方面的研究。E-mail:wtfeng@sina.com

郭 劲(1964—),男,吉林长春人,博士,研究员,博士生导师,2007年于中国科学院长春光学精密机械与物理研究所获得博士学位,主要从事光电测控技术与光电总体技术方面的研究。E-mail:guojin1964@126.com
2014-10-15;
2014-11-12
激光与物质相互作用国家重点实验室基金资助项目(No.SKLLIM0902-01)
*Corresponding author,E-mail:wangweibing10@126.com
