成像角膜曲率计的光学设计
2014-04-30何远清刘永基
何远清,刘永基,翟 奕
(南开大学 现代光学研究所,天津 300071)
成像角膜曲率计的光学设计
何远清,刘永基*,翟 奕
(南开大学 现代光学研究所,天津 300071)
为了提高角膜曲率计的测量精度,借助于现代光电子技术,设计了一款高精度的成像角膜曲率计。系统包括环形物、一次成像系统、角膜、二次成像系统和CCD探测器。首先在ZEMAX软件中,设计了成像角膜曲率计的一次成像系统和二次成像系统,分别对两个成像系统进行优化设计;然后通过半透半反镜组将一次成像系统和二次成像系统拼接,组成成像角膜曲率计的光学系统,并对其进行整体的优化设计。最后,利用TracePro对所得的环形像进行模拟和分析。结果表明:所设计的成像角膜曲率计的测量范围约为30~60D(对应角膜曲率半径5.5~11 mm),测量精度在角膜曲率半径7.8 mm时达到0.072D。
角膜曲率计;成像系统;高精度
1 引言
20世纪末,随着人眼波前像差的成功测量[1],使得波前像差技术在眼视光领域得到了长足的发展。例如,波前像差技术引导的角膜激光手术逐渐成熟,根据波前像差数据来进行客观验光的方法已经被提出[2-3]。Thibos等人的研究结果显示,波前球柱测量精度可以达到0.125D[4];贺极苍等人分别研究了角膜前表面和眼内介质对于全眼波前像差的贡献[5];郭欢庆等人首次提出了基于波前像差和角膜地形图的个性化眼模型的设计方法[6]。随着波前像差测量精度的提高,对眼视光领域的其它测量技术,包括角膜屈光度的测量精度,提出了更高的要求。角膜是人眼最重要的屈光介质,约占人眼总屈光度的2/3,准确测量角膜的屈光状态,对于指导角膜接触镜的佩戴和基于波前像差技术引导的角膜屈光手术、角膜接触镜的佩戴都具有重要的意义[7]。
传统的手动角膜曲率计多采用双像棱镜系统,通过两块棱镜的轴向移动,使得光标的双像间距达到预期,其测量精度一般认为是0.25D[8]。Bausch&Lomb角膜曲率计是一款双像可变的一位角膜曲率计,精度较高,对于角膜曲率的测量精度可达到0.12D。手动操作不可避免地引入了主观误差,因此对操作者的熟练程度提出了较高的要求。Orbscan角膜地形图仪是一款基于光学裂隙扫描原理对角膜进行测量的仪器[9],其对于角膜曲率的测量精度为0.25D[10]。Pentacam是目前最为先进的测量角膜面型的眼科测量仪器。仪器带有的Scheimpflug摄像机围绕角膜中心点旋转拍摄,旋转一周可以得到25 000个高度点数据,通过计算机对这些高度点数据进行模拟重建,得到精确的眼前节形态[11],其测量角膜曲率的精度为0.2D。
本文设计了一款操作简便,精度较高,采用CCD探测器的新型成像角膜曲率仪光学系统,环形物经一次成像系统、角膜反射、二次成像系统,成像在CCD接收面上。光学系统通过外调焦方式对不同曲率半径的角膜清晰成像,不同曲率半径的角膜对应不同的像面位置和不同大小的清晰像,由像的大小获得角膜的曲率半径。借助于现代光学成像技术和图像处理技术,新型成像角膜曲率计具有测量范围广和测量精度高的特点。
2 设计原理
角膜具有中央接近球形,周边逐渐平坦的几何特性,以角膜顶点为中心的半径1~2 mm的区域内曲率变化较小,对此区域的角膜部分进行测量所得结果更为准确,更能反映角膜整体的特性。本文在设计的过程中,将角膜作为整个光学系统的一部分参与成像,然后对光学系统进行整体的优化设计。
图1为成像角膜曲率计光学系统成像原理图,该系统由3部分构成,分别为一次成像系统、角膜和二次成像系统。通过半透半反镜联接起来,环形物经过一次成像系统在角膜后方成一倒立实像,经过角膜反射得到一正立的虚像,最后经过二次成像系统在CCD接收面上成一倒立的实像。通过分析像的特征获得角膜的曲率半径和散光。
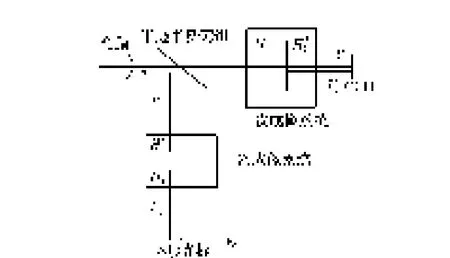
图1 角膜曲率计的光学系统成像原理图Fig.1 Schematic diagram of the keratometer′s optical system
假设环形光标的尺寸为2y0,环形光标相对投影系统的物距和像距分别为L0和一次成像系统焦距和物像放大率分别为f1和β1,角膜曲率半径为r,角膜和一次成像系统的主平面的距离为d,经过角膜反射后的虚像相对于二次成像系统的物距和像距分别为L2和二次成像系统的焦距和物像放大率分别为f2和β2,环形物在CCD接收器上的像尺寸为分别对一次成像系统、角膜和二次成像系统利用高斯公式、倍率公式及球面反射公式:
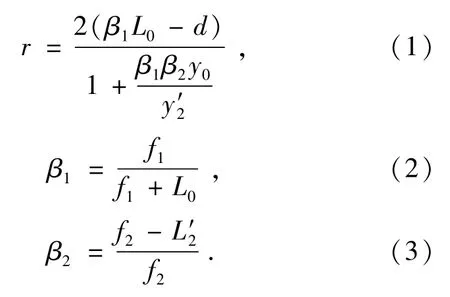
角膜前表面屈光度P可由下式得到:

式中:r为测量得到的角膜前表面曲率半径,n为相对折射率,取1.337 5。
3 系统设计
3.1 设计指标
成像角膜曲率计光学系统的设计是在ZEMAX环境下完成的,其工作波长设定为850 nm。环形物的尺寸为外环半径5 mm,内环半径4.6 mm。接收器选为0.85 cm,120万像素CCD,像元尺寸为3.75 μm×3.75 μm,靶面区域大小为4.8 mm×3.6 mm,成像系统的像面分辨率要求是由CCD的奈奎斯特频率决定:

式中:f为奈奎斯特频率,即像面分辨率,α为以μm为单位的像元尺寸。计算得f=133 lp/mm。考虑到加工装调后系统分辨率的下降,本文要求在设计过程中,成像系统的调制传递函数值在测量不同曲率半径的角膜时大于0.2。此外,限定角膜的测量区域为以角膜顶点为中心的半径1~2 mm范围内。这一条件对整个光学系统的孔径大小做了限定,也限制了光学系统的成像分辨率。设计指标见表1。
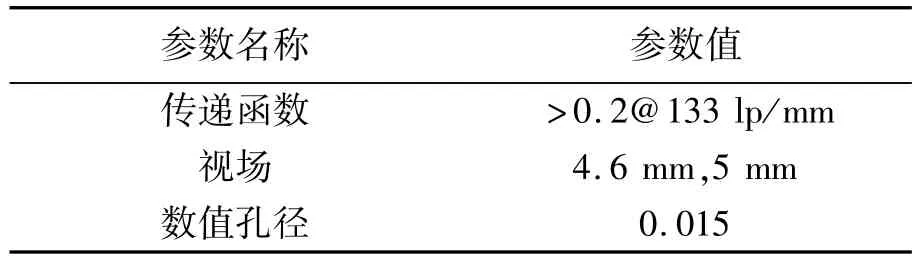
表1 成像角膜曲率计的设计指标Tab.1 Specific parameters of design of imaging keratometer
3.2 设计过程
一次成像系统的目的是将环形物成像于角膜附近区域,由于角膜的测量区域有一定的限制(半径1~2 mm区域内),所成的像应小于角膜测量区域,因此一次成像系统的物像放大率应小于1。若所成像位于角膜前,经过角膜反射的像将具有较大的孔径角,不利于二次成像;若所成像的位置在角膜后,且距角膜较近,不能满足角膜测量的区域条件。综合考虑,本设计选择角膜后方20 mm处作为一次成像位置。考虑到一次成像系统后方要接半透半反镜组,且整个系统与角膜之间应留有一定的测量距离,要求一次成像系统具有较长的后工作距。
本文设计了基于双高斯结构的六片式镜组作为一次成像系统。双高斯系统为对称结构,具有大数值孔径、高分辨率、低畸变的特点。根据设计要求,将一次成像系统视场设置为物高为0和5 mm(环形物外径),镜组的有效焦距约为70 mm,环形物距第一片镜头为150 mm,后工作距为80 mm,像半高为2.83 mm,物像放大率为0.566。
一次成像系统所成像半高2.83 mm,位于角膜后方20 mm,按照最大角膜曲率半径11 mm计算,经过角膜反射后所成虚像半高1.08 mm。考虑到CCD靶面的半宽为1.8 mm,相应的二次成像系统的放大率应为1.66,以满足在CCD接收面上的内切二次成像。本文设计了七片式双高斯镜组作为二次成像系统,满足上述条件。二次成像系统的有效焦距约为84 mm,物像放大率为1.66。值得指出的是,当角膜的曲率半径发生变化时,二次成像系统的像距也发生变化,即二次成像系统的放大率随角膜曲率半径的变化而改变。
最后,根据物像关系将一次成像系统,角膜,二次成像系统通过半透半反镜组连接起来,组成成像角膜曲率仪的光学成像系统。图2为其结构图。
成像角膜曲率计要求系统成像质量较高,本文将一次成像系统的倒数第二面设置为环曲面,用以矫正系统本身的像散,同时将一次成像系统的最后一面设置为非球面,用以矫正系统的球差及其他像差。角膜曲率半径随个体存在差异,本设计中角膜作为光学系统的一部分参与成像,角膜曲率半径的变化会对整个光学系统的成像造成影响。为了使环形物在不同角膜曲率半径的情况下都能清晰成像,对光学系统进行多重结构的优化设计,分别对应于5.5~11 mm之间不同的角膜曲率半径,然后对多重结构进行整体的优化设计,使得不同曲率半径的被试角膜对应于不同的CCD接收面位置,也即采用外调焦的工作方式。
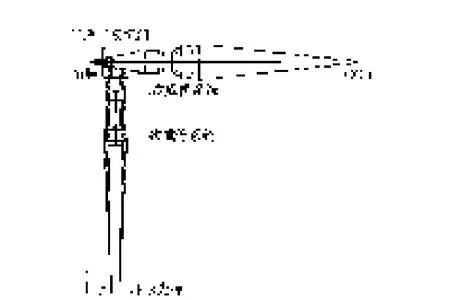
图2 成像角膜曲率计光学系统结构图Fig.2 Layout of imaging keratometer′s optical system
4 设计结果
成像角膜曲率计的角膜测量范围为5.5~11 mm。Gullstrand模型眼中,角膜前表面的曲率半径为7.8 mm。因此本文分别选取5.5、7.8、11 mm作为参考曲率半径,分别对光学成像系统进行像质分析。图3为光学成像系统的调制传递函数(MTF)曲线,(a)、(b)、(c)分别对应角膜曲率半径为5.5、7.8、11 mm时的情形。图中曲线1代表光学系统的衍射极限,曲线2代表4.6 mm视场(环形物的内环半径)的MTF曲线,曲线3代表5 mm视场(环形物的外环半径)的MTF曲线。如图所示,光学成像系统在不同的角膜曲率半径时对应的MTF曲线在空间频率133 lp/mm处的值基本大于0.2,满足了分辨率的要求,说明对于不同的角膜曲率半径,光学成像系统均能在CCD接收面上清晰成像。
图3 角膜曲率计光学系统的调制传递函数(MTF)曲线Fig.3 MTF curves of imaging system corresponding to different radii of curvature of corneal surfaces
环形像的半径是在TracePro环境中获得的。环形光标采用波长0.85 μm,输出光功率1 W的朗伯光源进行模拟。根据TracePro提供的像面照度(能够提供像面上1 024×1 024个点的照度值),采用质心计算方法确定环形像的半径。首先以环形像的几何中心为原点建立直角坐标系,分别选取环形像在一定角度方向上的点,利用质心算法求出此方向上的像的半径。多个方向上环形像质心半径取平均值得到整个环形像的质心半径。对于角膜曲率半径从5.5~11 mm的测量范围,本文选取12个离散位置,在ZEMAX环境中获得相应的环形像,进而在TracePro环境中得到环形像的照度值,再在Matlab环境中用质心计算方法计算各环形像的半径,结果如表2所示。值得指出的是,利用质心算法计算所得的环形像各个方向的半径的标准差较小,角膜曲率半径5.5 mm时得到的环形像半径的标准差为2.07× 10-3mm,7.8 mm时的环形像的半径标准差为1.95×10-3mm,11 mm时的环形像的半径的标准差为1.52×10-3mm。此标准差值可以作为角膜曲率测量的精度。
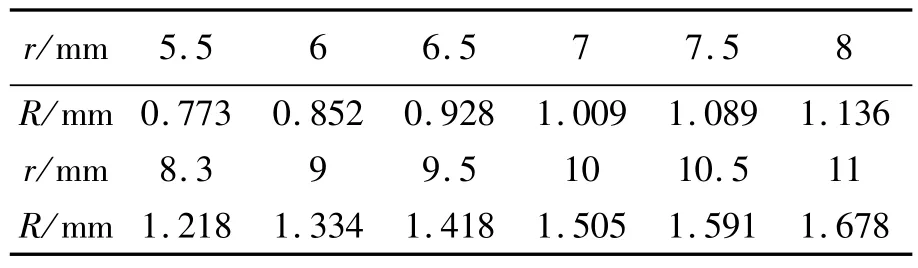
表2 利用质心计算方法得到的光学成像系统在不同角膜曲率半径r的情况下所得环形像的半径RTab.2 Radius of annular image(R)calculated by centroid algorithm for different radius of curvature(r)of corneal surface
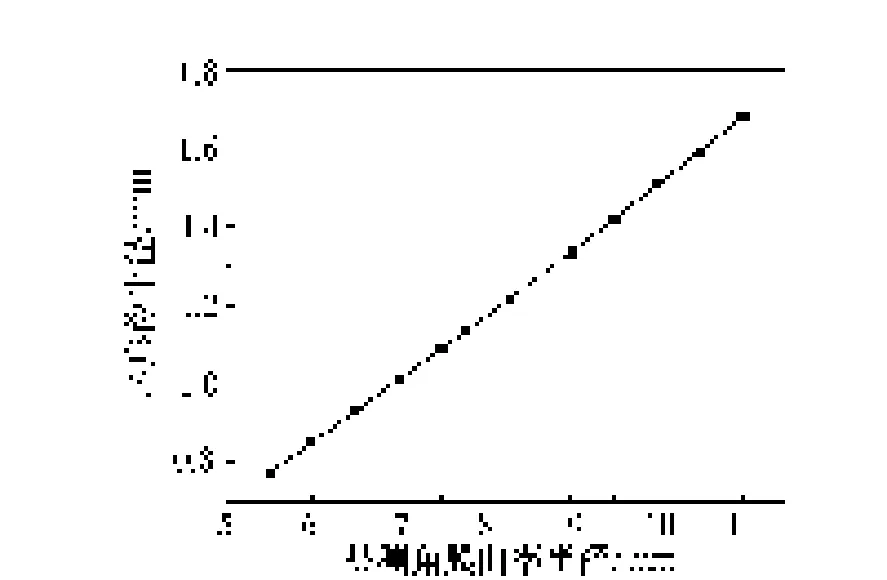
图4 角膜曲率半径和环形像的半径的关系曲线Fig.4 Relevance between the radius of curvature of the corneal surface and the radius of the annular image
图4为根据表2绘出的角膜曲率半径和环形像半径的关系曲线,横坐标为角膜曲率半径,纵坐标为环形像的半径。从图中可以看出,两者具有良好的线性关系。根据图中曲线可以求得不同曲率角膜的探测精度。本文计算了12个不同的角膜曲率半径对应的环形像半径,实际上,为了获得更高的检测精度,更多的采样点是可行的,这在ZEMAX中是容易实现的。这条曲线可以当作定标曲线用来通过环形像的半径计算被测角膜的曲率半径。本文以环形像的半径改变2.1 μm (0.56个像元)作为可识别的精度,由曲线计算出系统在不同角膜曲率半径处的检测精度,如表3所示。可以看出,系统在小角膜曲率半径端(5.5 mm)有0.156D的检测精度;在统计平均意义上的角膜曲率半径7.8 mm处,可以实现0.072D的检测精度;在大角膜曲率半径端(11 mm)可有0.036D的检测精度。
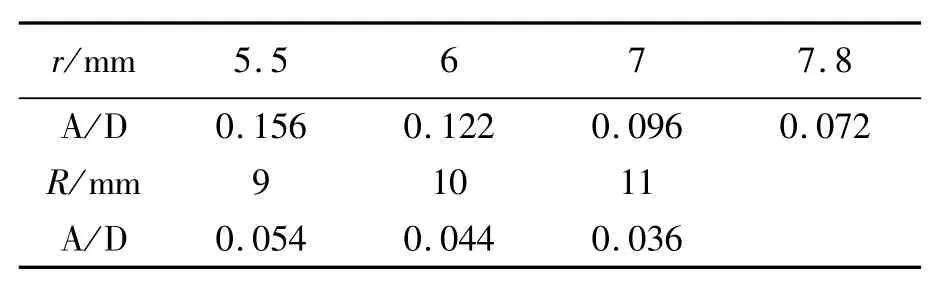
表3 成像角膜曲率计在不同角膜曲率半径处的检测精度Tab.3 Measurement accuracy(A)of optical system for corneas with different radii of curvature(r)
此外,本文提出了公差要求,在公差要求下,MTF曲线在系统要求的频率:133 lp/mm时的值仍大于0.15,满足成像系统的设计要求。公差要求列于表4。
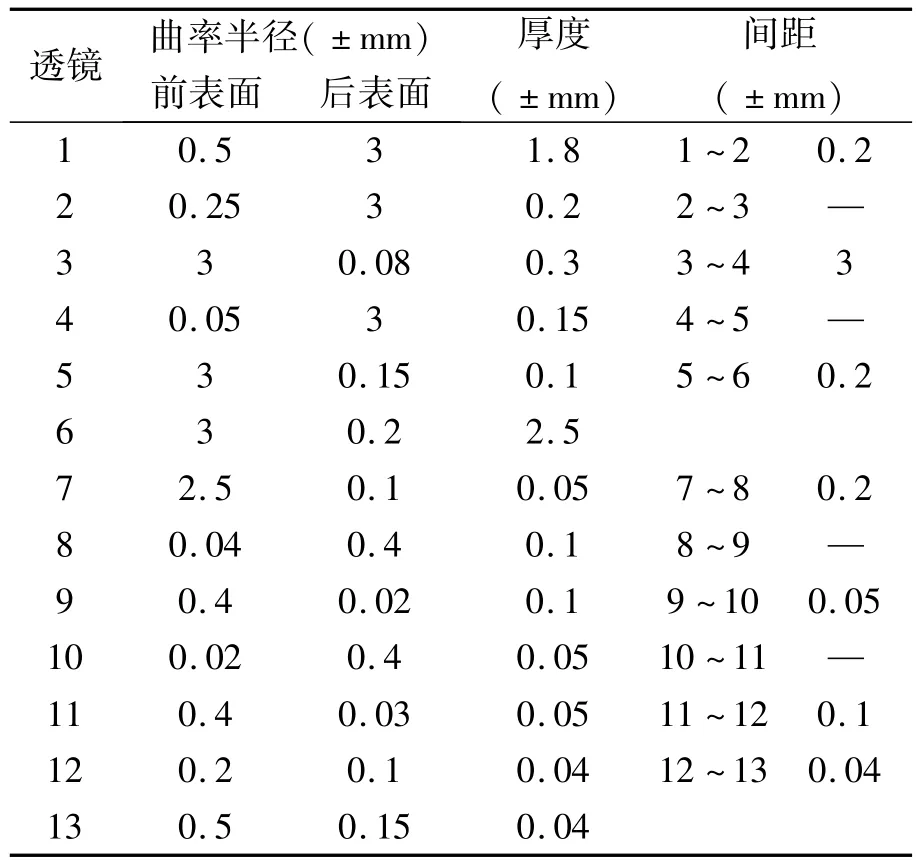
表4 公差要求Tab.4 Tolerance value
5 结论
本文提出了一款成像角膜曲率仪的光学系统。系统包括环形光标、一次成像系统、角膜、二次成像系统以及CCD探测器。环形光标经过一次成像、角膜前表面反射和二次成像后在CCD接收面上成环形像,通过分析像的特征得到角膜的曲率。测量范围达30D,测量精度在角膜曲率半径7.8 mm时达到0.072D。光学系统采用外调焦的工作方式,对于不同曲率半径的角膜有不同的像面位置,对应不同大小的清晰像,此方式可获得较高的测量精度。借助于现代光学成像技术和图像处理技术,成像角膜曲率计达到了测量范围广和测量精度高的要求。
[1]LIANG J,GRIMM B,GOELZ S.Objective measurement of wave aberrations of the human eye with the use of a Hartmann-Shack wave-front sensor[J].JOSA A,1994,11(7):1949-1957.
[2]LEE J.Wavefront technology for spectacle lenses[J].Review of Ophthalmology,2005,12(3):91.
[3]SEIPLE W H,SZLYK J P.Clinical investigation into the vision performance provided by the iZon spectacle lens system[J].Review Ophthalmology,2008,145(2):1.
[4]THIBOS L N,HONG X,BRADLEY A,et al..Accuracy and precision of objective refraction from wavefront aberrations[J].J.Vision,2004,4(4):329-351.
[5]HE J,GWIAZDA J,THORN F,et al.Wave-front aberrations in the anterior corneal surface and the whole eye[J].J. Opt.Soc.Am.A,2003,20(7):1155-1163.
[6]GUO H,WANG Z,ZHAO Q.Individual eye model based on wavefront aberration[J].Optik,2005,116(2):80-85.
[7]GUTMARK R,GUYTON D L.Origins of the keratometer and its evolving role in ophthalmology[J].Survey of Ophthalmology,2010,55(5):481-497.
[8]HANNUSH S B,CRAWFORD S L,WARING G O.Accuracy and precision of keratometry,photokeratoscopy,and corneal modeling on calibrated steel balls[J].Arch Ophthalmol,1989,107(8):1235-1239.
[9]LIU Z,HUANG A,PFLUGFELDER S.Evaluation of corneal thickness and topography in normal eyes using the Orbscan corneal topography system[J].Br J Ophthalmol,1999,83(7):774-778.
[10]P REZ J G,CERVI O A,GIRALDEZ M J.Accuracy and precision of EyeSys and Orbscan systems on calibrated spherical test surfaces[J].Eye and Contact Lens,2004,30(2):74-78.
[11]LACKNER B,SCHMIDINGER G,PIEH S,et al..Repeatability and reproducibility of central corneal thickness measurement with Pentacam,Orbscan,and ultrasound[J].Optom.Vis.Sci,2005,82(10):892-899.
Optical design of imaging keratometer
HE Yuan-qing,LIU Yong-ji*,ZHAI Yi
(Institute of Modern Optics,Nankai University,Tianjin 300071,China)
An imaging keratometer by the aid of modern optoelectronic technology is proposed to improve the accuracy of measurement.The optical system consists of an annular object,a first imaging subsystem,a second imaging subsystem,and a CCD detector.First,the first imaging subsystem and second imaging subsystem are designed and optimized by ZEMAX,and two subsystems are connected by a semitransparent mirror.Then we perform optimization of the whole optical system of imaging keratometer.Finally,the simulation of the illumination of the annular image is accomplished by TracePro.The result shows that the measurement range of this imaging keratometer is about 30D to 60D(5.5 mm to 11 mm in radius of curvature),and the accuracy is about 0.072D in the case of the radius of curvature of 7.8 mm.
keratometer;imaging system;high accuracy
TH703;R778.2
A
10.3788/CO.20140706.0956
2095-1531(2014)06-0956-06

何远清(1988—),男,山西太原人,硕士研究生,主要从事光学设计和视光学方面的研究。E-mail:yuanqing590@126.com

刘永基(1977—),女,河北秦皇岛人,博士,讲师,2002年于华中科技大学获得硕士学位,2005年于南开大学获得博士学位,主要从事光学设计和视光学方面的研究。E-mail:yjliu@nankai.edu.cn

翟 奕(1989—),女,天津人,硕士研究生,主要从事光学设计和视光学方面的研究。E-mail:zhaiyi@mail.nankai.edu.cn
2014-09-16;
2014-11-15
国家自然科学基金资助项目(No.11104149)
*Corresponding author,E-mail:yjliu@nankai.edu.cn
