UUV自航发射鱼雷过程仿真
2014-02-28孙玉松李宗吉练永庆
孙玉松, 李宗吉, 练永庆
UUV自航发射鱼雷过程仿真
孙玉松, 李宗吉, 练永庆
(海军工程大学 兵器工程系, 湖北 武汉, 430033)
无人水下航行器(UUV)外挂鱼雷具有重要的战术价值。由于UUV体积小、质量轻, 自航发射鱼雷时运动状态会发生改变。为了定量分析这种变化以验证发射的可靠性, 建立了UUV自航发射鱼雷的运动模型, 根据此模型利用FLUENT对发射过程进行了仿真。仿真结果表明, UUV发射鱼雷时运动状态会发生一定的变化, 但采用自航发射仍然具有可行性。同时得出鱼雷脱离发射导轨时的运动参数, 为精确计算鱼雷的外弹道提供了依据。
无人水下航行器; 外挂鱼雷; 自航式发射; FLUENT
0 引言
无人水下航行器(unmanned underwater vehicle, UUV)顾名思义就是指无人操纵的水下航行器, 通常由水面舰艇或潜艇布放入水[1], 军用无人水下航行器是指参与军事行动的无人水下航行器。
UUV最早出现在20世纪60年代[2], 但在较长的时间里只见于民用, 主要用于代替潜水员进行深水勘探、沉船打捞和水下电缆铺设及维修, 主要采用有缆的工作方式。直到20世纪90年代中期, 或许是受到无人机使用效果的启发, 美国海军提出利用UUV进行水下侦查、通信、反潜和反水雷[3], 以解决在这些方面现有武器所遇到的问题。
从UUV上发射鱼雷武器可使发射点既靠近目标又远离高价值平台, 具有响应迅速和隐蔽性好的特点[4]。但UUV发射鱼雷不同于潜艇。UUV具有体积小、质量轻的特点, 其运动状态在发射鱼雷的过程中会因受到鱼雷自航运动的干扰而发生变化, 甚至可能产生失稳而导致发射失败。为了验证UUV发射重型鱼雷的可行性, 本文建立了UUV自航发射鱼雷的运动模型; 在此基础上利用FLUENT软件对从鱼雷启动到脱离发射导轨这段时间UUV的运动过程进行了仿真。同时对仿真结果进行了分析。
1 UUV自航发射鱼雷的运动模型
在FLUENT求解器中, 可以求得UUV和鱼雷在大地坐标系中的阻力、升力和力矩。根据这些力和力矩, 使用依据UUV自航发射鱼雷的动力学和运动学方程编写的用户自定义函数(user defined functions, UDF)可计算出UUV和鱼雷在下一时刻的运动参数。
1.1 工作原理
在UUV底部加装发射导轨, 鱼雷外挂在导轨之上。结构示意图如图1所示。
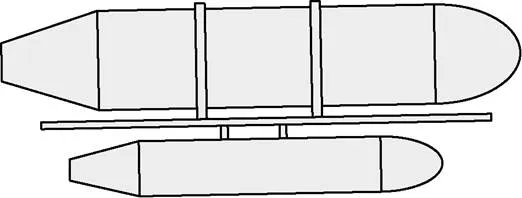
图1 结构示意图
自航发射时, 鱼雷推进系统推动鱼雷沿发射导轨向前运动, 至鱼雷脱离发射导轨, 发射过程结束。
1.2 3个坐标系
分析UUV受力, 需要用到3个坐标系, 分别是地面坐标系, 速度坐标系和体坐标系。3个坐标系及其关系如图2所示。
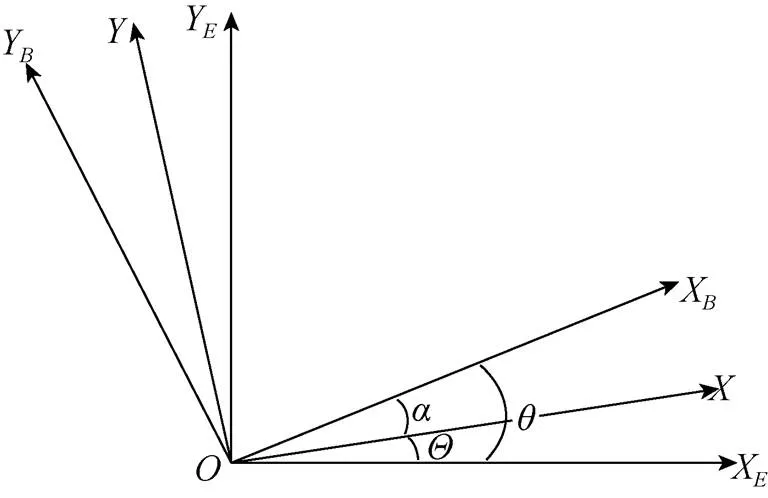
图2 3个坐标系
1.3 挂载鱼雷前UUV的受力
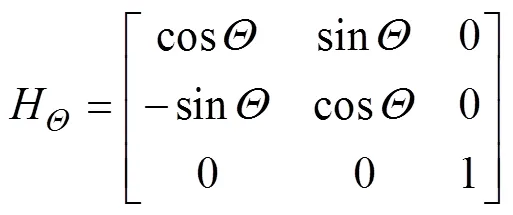
UUV在水中的运动可以分为在速度坐标系平面内的平动和绕质心的转动。由于UUV在运动过程中结构不会发生变化, 因此可以将UUV看做一个刚体。在速度坐标系中, UUV受力如下
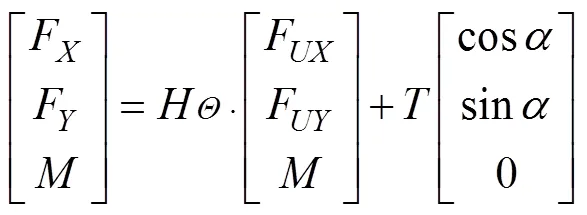
其中
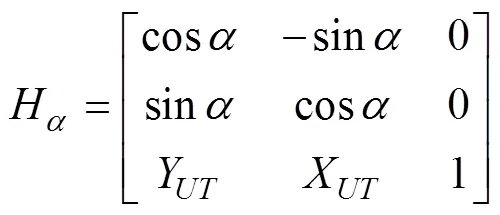
1.4 自航发射时鱼雷对UUV的作用力

1.5 UUV动力学和运动学方程组
从自航发射开始, 到鱼雷脱离导轨。UUV动力学方程如下。
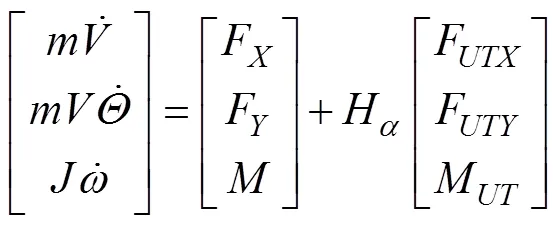
其中

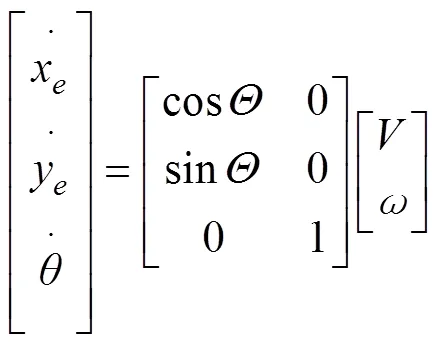
, , 均是在速度坐标系下的运动学参数。在地面坐标系中的运动学方程组如下
2 仿真过程
2.1 Gambit建模与网格划分
利用Fluent对UUV自航发射鱼雷过程进行仿真分析, 是目前在没有实体模型条件下对发射过程进行预测的一种手段。首先利用Gambit生成UUV自航发射鱼雷的计算域并进行网格划分。计算域为UUV和鱼雷周围的一个圆柱形区域。采用非结构网格对计算域进行划分, 并对鱼雷和UUV首尾部分的网格进行加密。模型简化了UUV和鱼雷外部结构, 为了保证网格质量, 用于连接UUV和鱼雷的导轨未画出。UUV和鱼雷的相互影响由UDF中的公式算出。设置入口边界为速度入口; 出口为出流(outflow)边界; 外边界为Wall; 将UUV和鱼雷表面设置为Wall。并分别命名为UUV和torpedo。计算域设置为流体。网格划分结束之后局部网格如图3所示。
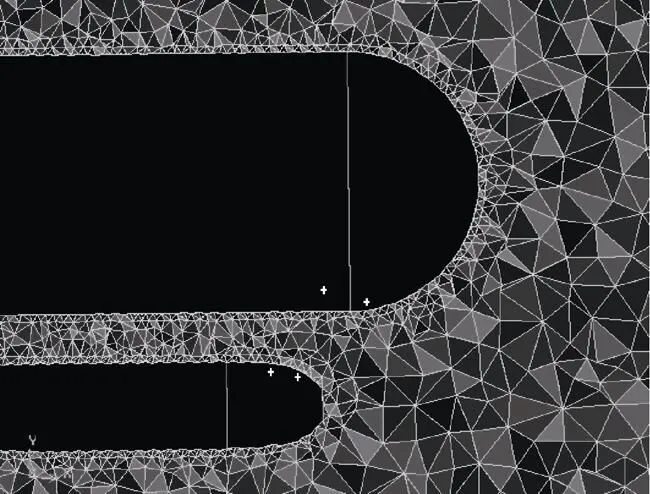
图3 计算域部分网格
2.2 Fluent仿真条件设置

表1 发射初始参数
首先使用定常模型对流场进行初始化计算, 直到残差因子符合要求。然后设置求解器为非定常。并将根据UUV自航发射鱼雷动力学和运动学方程组编写的UDF分别加载到代表UUV和鱼雷的壁面上。因UUV和鱼雷的运动导致网格变形。故采用弹性模型和网格重构对网格进行重新划分。在网格重构中使用尺寸函数并选定新网格质量必需有所提高。每次计算域发生改变时标记所有网格。参考Mesh Scale info中的参考值, 将最大单元畸变设为0.65。
在发射过程中, UUV和鱼雷表面压强如图4~图6所示。
图4 0.02 s时表面压强
图5 3s时表面压强
图6 发射结束时表面压强
3 仿真结果与分析
3.1 仿真结果
UUV在发射鱼雷过程中, 部分运动参数变化过程如图7~图10所示。
图7 UUV俯仰角变化曲线
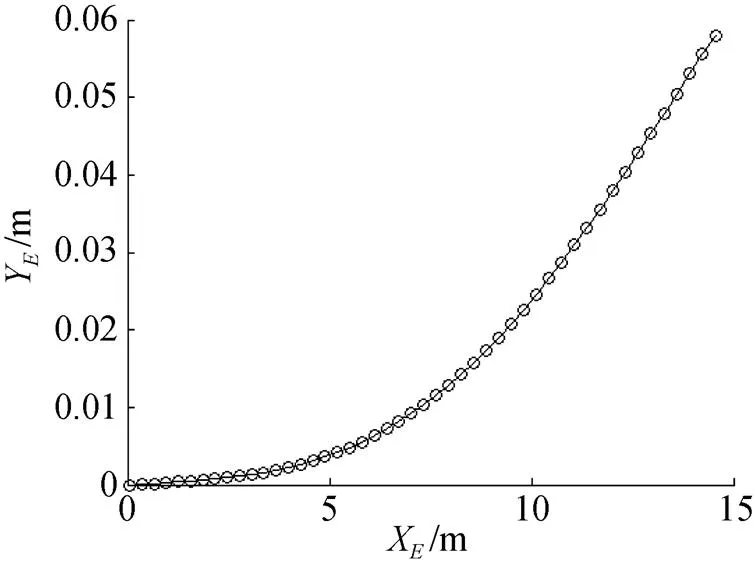
图8 UUV位移曲线

图9 UUV阻力变化曲线
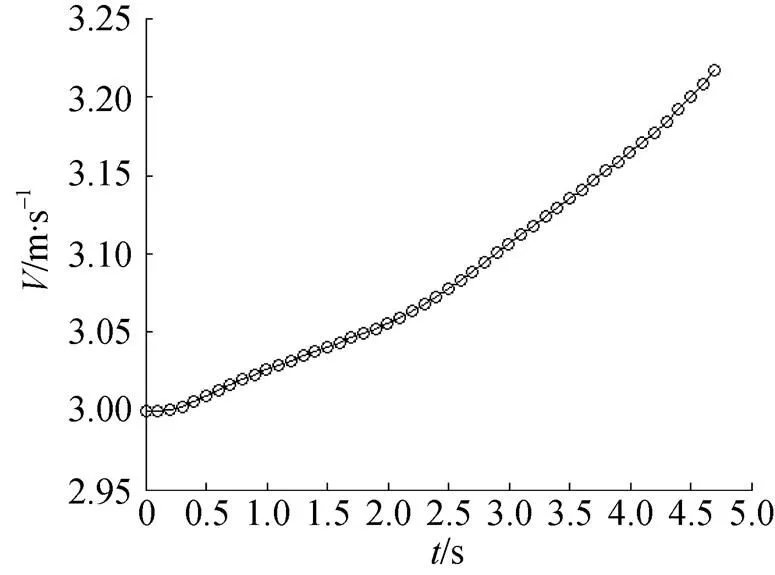
图10 UUV速度变化曲线
3.2 仿真结果分析
发射共耗时4.70 s, 随着发射的进行, UUV俯仰角开始的时候有所增加, 主要是受鱼雷摩擦力产生的正力矩的影响。但随着鱼雷相对于UUV前移一定距离后, 由鱼雷负浮力产生负力矩使得UUV俯仰角开始减小。但由于UUV具有较大的转动惯量和水中附加质量。在运动过程中UUV俯仰角变化较小。变化幅度约为0.005弧度。从图中可以发现, UUV的阻力最终是减小的。按照阻力公式, 在UUV速度增大的情况下, 其所受阻力应当增大。但在发射鱼雷过程中, 鱼雷向前加速运动, 导致UUV周围流场改变, 使得UUV阻力减小。UUV的速度在不断的增加, 这是向前运动的鱼雷对其作用的摩擦力及自身流体阻力减小的结果。在发射过程中, UUV和鱼雷艏部压强分布如图11所示。
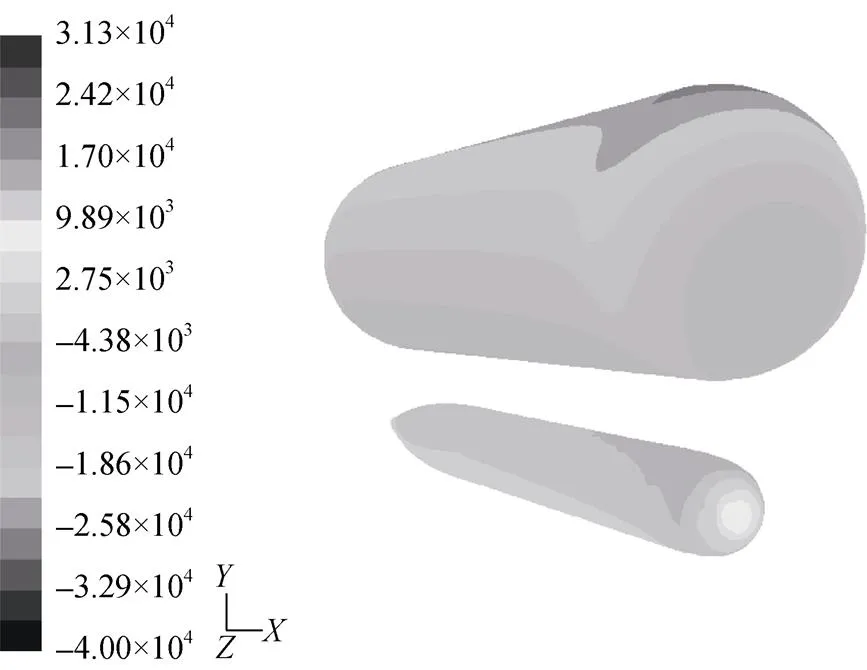
图11 UUV和鱼雷艏部压强
仿真结果表明, UUV运动参数会发生一定变化, 但幅度很小。利用UUV自航发射外挂的重型鱼雷具有良好的可行性。发射完成时, 即鱼雷转入下一阶段运动的初始时刻, 鱼雷运动参数如表2所示。

表2 鱼雷脱离导轨时运动参数
4 结束语
本文根据多刚体动力学关系推导了UUV自航发射鱼雷过程中的动力学和运动学方程组。并利用FLUENT对发射过程进行了仿真。仿真结果验证了UUV自航发射鱼雷的可行性。同时得出的鱼雷离开导轨时的运动参数, 为精确计算鱼雷脱离UUV后的外弹道提供了依据。
[1] 张红. 多用途无人驾驶水下航行体[J]. 水雷战与舰船防护, 1997, 15(2): 21-25.
[2] 许韦韦, 孟昭香. 新兴的水下作战平台UUV[J]. 指挥控制与仿真, 2006, 28(3): 16-19.Xu Wei-wei, Meng Zhao-xiang. UUV, the Rising Underwater Operation Platform[J]. Command Control & Simulation, 2006, 28(3): 16-19.
[3] 孙现有, 焦泽健, 宋长会. 无人水下航行器发展与应用[J]. 水雷战与舰船防护, 2012, 20(2): 51-54.Sun Xian-you, Jiao Ze-jian, Song Chang-hui. Development and Application of Unmanned Underwater Vehicles[J]. Mine Warfare& Ship Self-Defence, 2012, 20(2): 51-54.
[4] 周杰. 基于CFD的UUV外挂鱼雷位置分析[J]. 鱼雷技术, 2010, 18(6): 414-418.Zhou Jie. Analysis of Torpedo Positions Externally Hanged on UUV Based on CFD[J]. Torpedo Technology, 2010, 18(6): 414-418.
[5] 徐宣志, 欧阳吕伟, 严忠汉, 等. 鱼雷力学[M]. 北京:国防工业出版社, 1992.
[6] 练永庆, 王树宗. 鱼雷发射装置设计原理[M]. 北京: 国防工业出版社, 2012: 65-66.
(责任编辑: 许妍)
Process Simulation of Torpedo Swim-out Launching from UUV
SUN Yu-songLI Zong-jiLIAN Yong-qing
(Department of Weaponry Engineering, Naval University of Engineering, Wuhan 430033, China)
Externally hung torpedo on an underwater unmanned vehicle(UUV) is of great tactical significance in warfare. Because UUV is small in volume and light in weight, its movement state will change when a torpedo swims out from it. In this paper, to analyze quantitatively the parameter change for verifying the reliability of torpedo launching, a movement model of a torpedo swim-out launching from UUV is built, and the launching process is simulated by the software FLUENT. Simulation results indicate that the movement state of UUV changes in the launching process, but this change will not significantly affect torpedo swim-out launching. In addition, the movement parameters of the torpedo leaving the launcher are obtained, which may provide a reference for precise calculation of torpedo’s exterior trajectory.
underwater unmanned vehicle(UUV); externally hung torpedo; swim-out launch; FLUENT
TJ635
A
1673-1948(2014)05-0396-05
2014-05-05;
2014-06-28.
孙玉松(1991-), 男, 在读硕士, 主要研究方向为兵器发射与动力推进技术.
