URG-04LX 2维激光扫描测距传感器的应用试验研究
2014-01-16林潮兴杨伟伟
胡 炼,林潮兴,杨伟伟,许 奕
(华南农业大学 工程学院, 广东 广州 510642)
2维激光扫描测距传感器是基于激光测距原理,通过旋转的光学部件发射形成二维的扫描面,以实现区域扫描及轮廓测量功能[1]。近年来,2维激光扫描测距传感产品广泛用于机器人环境识别、建筑物入侵保护(安防)、自动门/行为方式识别、自动导航车辆(AGV)障碍检测、无人飞行器避障和自主导航。本文将介绍一种HOKUYO公司的2D激光扫描测距传感器和其应用,并进行相关测试试验。
1 URG-04LX的工作原理与简介
1.1 工作原理
激光发射器发出激光脉冲波,当激光波碰到物体后,部分能量返回,当激光接收器收到返回激光波且返回波的能量足以触发门槛值。激光发射器发出激光脉冲波时间和收到返回激光波时间,从而计算它到物体的距离值[2]。激光扫描器连续不停的发射激光脉冲波,激光脉冲波打在高速旋转的镜面上,将激光脉冲波发射向各个方向从而形成一个二维区域的扫描。二维区域的扫描可以在扫描器的扫描范围内,设置不同形状的保护区域,当有物体进入该区域时,发出报警信号;或在扫描器的扫描范围内,扫描器输出每个测量点的距离,根据此距离信息,可以计算物体的外型轮廓,坐标定位等[3-7]。
1.2 URG-04LX简介
HOKUYO公司的URG-04LX 2D激光扫描测距传感器测距示意图如图1所示,采用直流5 V供电,工作电流小于500 mA。激光由波长785 nm的半导体激光二极管产生,激光安全等级I级。传感器测量距离为60~4 095 mm,扫描视场宽2400,从传感器顶部看激光以逆时针方向扫描,扫描一周时间为100 ms,共1 024个扫描步进,角度分辨率0.360。在扫描视场内最大有效扫描步数为683,起始步为44,终止步为725。在60~1 000 mm测量距离时测量精度为±10 mm,在1 000 ~4 095 mm 测量距离时测量精度为1%测量距离。传感器具有全速USB-mini B接口和RS232C接口,测量噪音<25 dB。传感器体积小,长宽高为50 mm×50 mm×70 mm,且重量轻仅160 g。
2 URG-04LX操作
2.1 URG-04LX测距数据命令
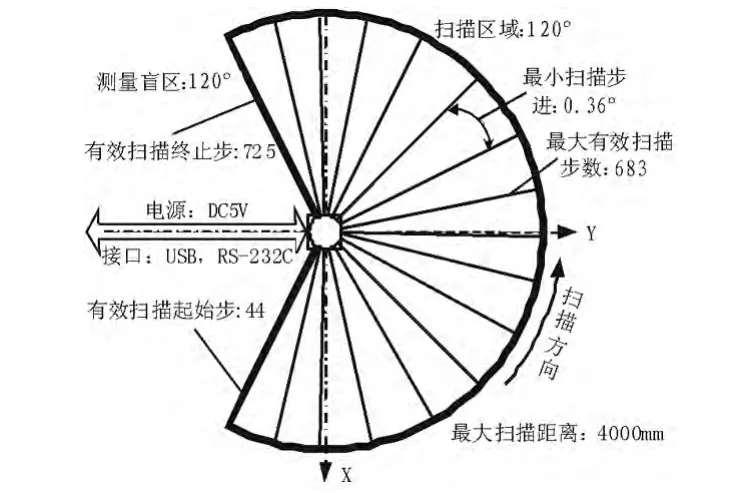
图1 URG-04LX传感器测距示意图Fig. 1 Diagram of distance measurement of URG-04LX
URG-04LX具有全速USB和RS232C两种外部接口,连接方便,如图2所示。两接口可同时使用,也可选择其中一个接口与计算机或嵌入式系统连接。USB接口具有优先操作权,在无USB接入时将自动切换为RS232C接口操作。为规范通讯,传感器制定有与计算机或嵌入式系统的通讯协议。传感器测距数据的发出需向传感器发送请求命令,在URG-04LX里有4种命令来请求获得测距数据,分别为MD、MS、GD和GS。命令GD和GS为单个距离数据请求,而MD和MS为连续距离数据请求。命令GD和MD返回的距离数据由3个ASCII字符组成,最大距离为262 144 mm,而GS和MS返回的距离数据由2个ASCII字符组成,最大距离为4 095 mm。
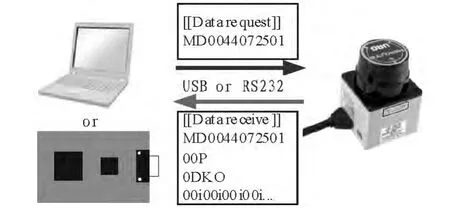
图2 URG-04LX与设备的连接Fig. 2 Connection of URG-04LX to host-device
MDMS和GDGS指令组成分别如图3(a)和(b)所示。第1部分为1个ASCII字符,M为连续测量,G为单次测量。第2部分为1个ASCII字符,S表示传感器返回数据格式为2 ASCII字符数据,M表示传感器返回数据为3 ASCII字符格式数据。第4和5部分用于设定传感器测距扫描范围,URG-04LX传感器共有750个扫描步,如要获得最大测量的范围则Starting point=0044(30H,30H,34H,34H),End point=0750(30H,37H,35H,30H)。第6部分为距离数据合并数,以多个相邻步中距离值最小的数据作为距离值,如Cluster Count=3,获得的值分别为3 059,3 055和3 062,则传感器返回值是3 055,因此Cluster Count的值也决定了传感器返回距离数据的个数和扫描角度分辨率,如果Cluster Count=2,则返回的距离数据减半,扫描步进角度为0.720。第7部分为扫描间隔,若逐步扫描则Scan Interval=0。MDMS指令比GDGS指令多1个扫描次数部分,用于多数重复测量。
2.2 距离数据处理
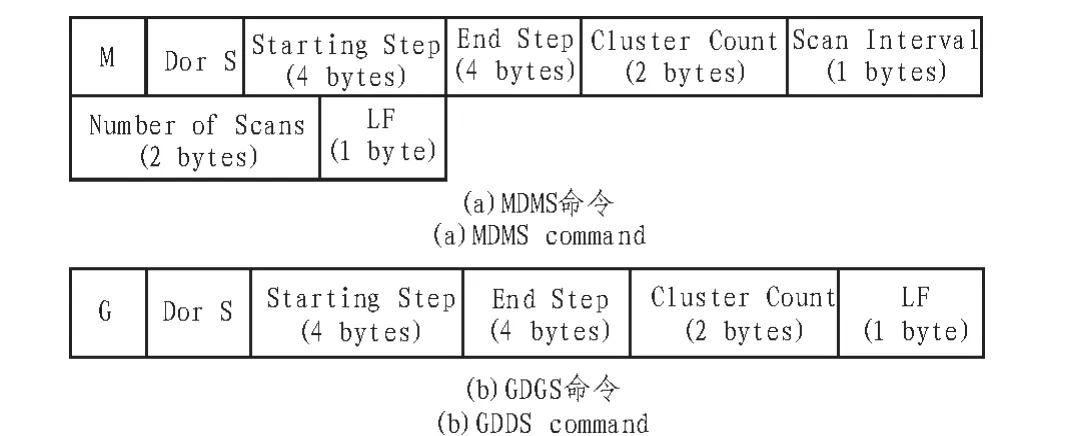
图3 数据获取指令Fig. 3 Data acquisition command
URG-04LX传感器返回的距离数据有2 ASCII字符格式和3 ASCII字符格式,传感器根据距离数据、通讯协议和数据请求指令将距离值进行编码,通过传感器接口输出。因此对接收到的距离数据需根据协议进行转换。
2 ASCII字符格式的最大长度为12 bits,用于最大距离不大4 095 mm,3 ASCII字符格式的最大长度为18 bits,用于最大距离不大262 144 mm。根据通讯协议距离数据转换过程如图4所示,首先将距离数据分成单个ASCII字符并将每个ASCII字符用十六进制表达;将此十六进制数据减去30H后转化为二进制表示,最后将各二进制数据合并转换为十进制便得到相应距离值。
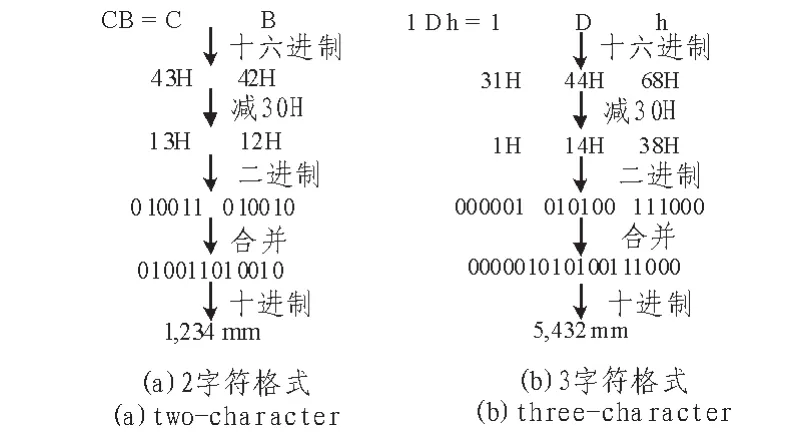
图4 距离数据转换Fig. 4 Data conversion of distance
2.3 UrgBenri接收数据
URG-04LX传感器数据也可以通过USB接口与计算机连接,通过软件UrgBenri获得。当USB设备连接成功后,即可以软件界面上以正交视图或数据表视图两种方式实时查看到图形或数据。在UrgBenri的操作窗口内可以查看传感器的相关信息,并可通过命令窗口对传感器进行设置。UrgBenri能将测量数据以文件形式保存,并能在无传感器状态下打开并恢复测量过程。
3 试验与分析
3.1 距离测量
将URG-04LX 2D激光扫描测距传感器固定在不同高度(分别为760 mm,1 081 mm,1 404 mm和1 725 mm),使传感器扫描窗口垂直向下对不同介质平面进行距离测量。测量时扫描从第334步到第434步逐步扫描,每次共101个测量距离值,测量到的距离值投影到Y轴方向上并求取平均值得到传感器到测量平面的距离,每个测量对象的3次测量结果的平均值如表1所示。
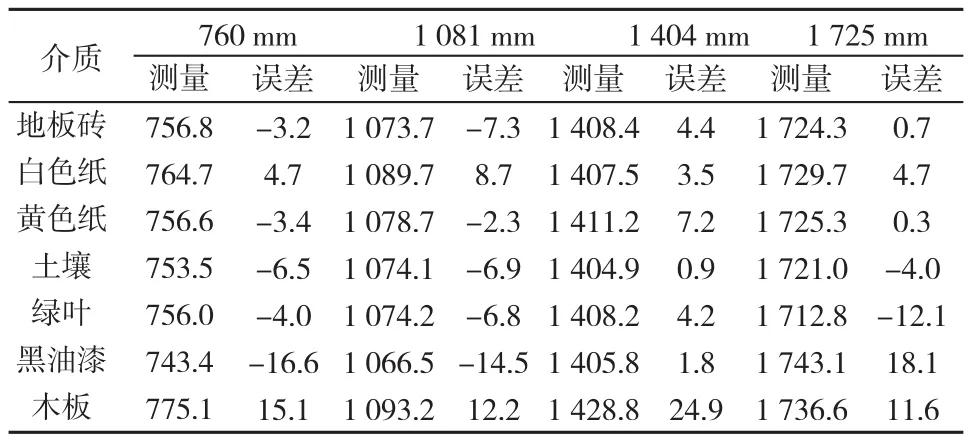
表1 距离测量结果Tab.1 Result of distance measurement
由表1可以知,试验中传感器对地板砖、白色纸、黄色纸和土壤进行扫描测量,能准确测量传感器与检测对象的距离,在2 m以内的测量误差小于10 mm。传感器测量绿色植物也能较好的测量出距离,在1404 mm以内测量时误差小于10 mm,在1725 mm测量时误差为±12.1 mm,但并未超出传感器测量误差(1%测量距离)。然而传感器在测量黑油漆和光滑木板时,测量误差较大,超出传感器测量误差范围,因此,不同的被测对象或颜色导致激光扫描传感器的测量精度存在差异。
3.2 障碍物检测
障碍物检测是URG-04LX 2D激光扫描测距传感器的重要应用之一,为测试传感器障碍物检测性能,布置了如图5(a)所示3面隔离实验环境,消除干扰。以中下部传感器的中心为坐标原点,隔离环境宽870 mm,前部离传感器中心650 mm。隔离环境内放置了3个圆柱形障碍物(圆柱1半径为66 mm、圆柱2和圆柱3半径都为111 mm)和1个矩形障碍物(长边为80 mm),激光扫描测距传感器测量结果如图5(b)所示。
由图可知,URG-04LX 2D激光扫描测距传感器的数据能清晰地检测出隔离环境内的4个障碍物。用障碍物前部的扫描点拟合成直线段,若以直线段长度表示障碍物大小,实验数据计算出3个圆柱障碍物尺寸分别为58.6 mm、103.0 mm和95.3 mm,矩形长度为82.5 mm,与实际分别相差7.4 mm、8 mm、15.7 mm和2.5 mm。若以直线段中心点(如图5(a)‘×’所示)到传感器中心的距离表达障碍物,根据实验数据计算障碍物的位置分别为(-252.9, 189.7)、(-226.3, 490.3)、(200.1, 362.3)和(25.18,370.9),障碍物距传感器中心的距离分别为316.2 mm、540.0 mm、413.9 mm和371.7 mm,而实际距离分别为304 mm、543 mm、416 mm和349 mm,分别相差12.2 mm、3 mm、2.1 mm和12.2 mm。
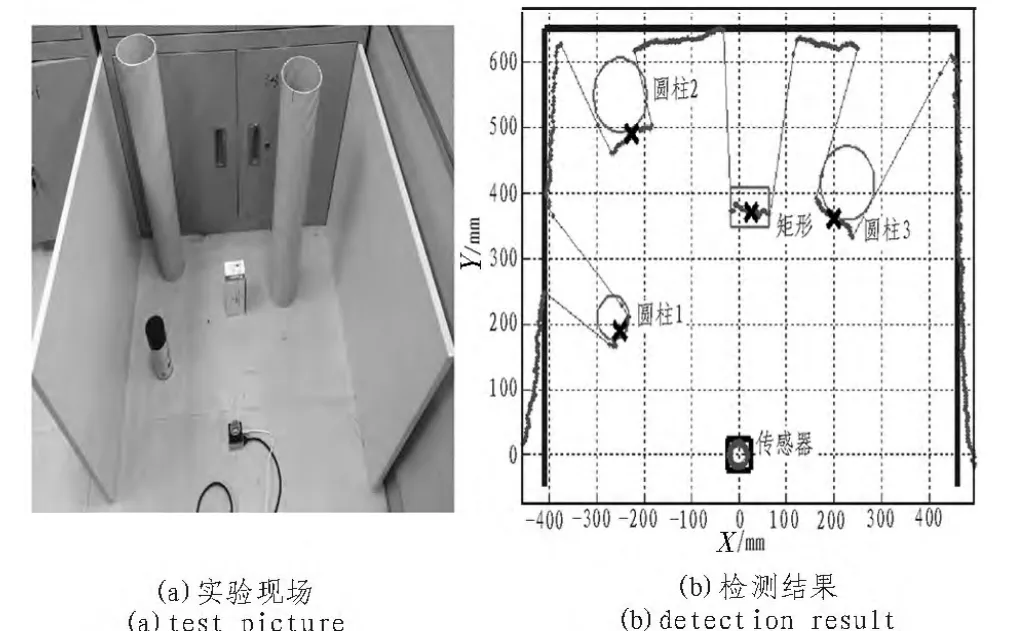
图5 障碍物检测Fig. 5 Obstacle detection
4 结 论
URG-04LX 2D激光扫描测距传感器能快捷进行2维距离测量,实现障碍物检测和传感器到平面的距离等,测量精度高。激光扫描测距传感器还可用于垄行检测、倾角检测等,若配合机器视觉等传感器可进一步提高智能识别程度[5-6]。
[1] 项志宇.基于激光雷达和移动机器人障碍检测和自定位[D].浙江: 浙江大学,2002.
[2] 陈千颂,杨成伟,潘志文,等.激光飞行时间测距关键技术进展[J]. 激光与红外,2002,32(1):7-10.CHEN Qian-song,YANG Chen-wei,PAN Zhi-wen,et al.A brief introduction on the development of laser time-of-flight distance measurement technology[J].Laser and Infrared, 2002,32(1):7-10.
[3] 陈得宝,赵春霞,张浩峰,等. 基于2维激光测距仪的快速路边检测[J].中国图象图形学报,2007,12(9):1064-1069.CHEN De-bao, ZHAO Chun-xia, ZHANG Hao-feng, et al.Quick road-boundary detection based on 2D laser range finder[J].Journal of Image and Graphics,2007,12(9):1064-1069.
[4] 冯肖维,方明伦,何永义,等.移动机器人自然路标特征提取方法[J]. 机器人,2010,32(4):540-546.FENG Xiao-wei,FANG Ming-lun,HE Yong-yi,et al.Natural landmark extraction method for mobile robot[J].Robot,2010,32(4):540-546.
[5] 张凯良,杨丽,张铁中.草莓采摘位置机器视觉与激光辅助定位方法[J].农业机械学报,2010,41(4):151-156.ZHANG Kai-liang, YANG Li, ZHANG Tie-zhong. Object locating method of laser-assisted machine vision for strawberryharvesting[J].Transactions of the Chinese Society for Agricultural machinery, 2010,41(4):151-156.
[6] 张奇,顾伟康. 基于多传感器数据融合的环境理解及障碍物检测算法[J]. 机器人,1998,20(2):104-110.ZHANG Qi, GU Wei-kang. Algorithms of environment understanding and obstacle detection based on multi-sensor data fusion[J].Robot,1998,20(2):104-110.
[7] 李配配,邓雷, 赵永雷. 配电网混合线路单端行波测距方法的研究[J]. 陕西电力,2013(4):70-73.LI Pei-pei,DENG Lei,ZHAO Yong-lei. Study on single-ended traveling wave fault location in distribution network hybrid lines[J]. Shaanxi Electric Power,2013(4):70-73.