基于扩频序列自相关性的导航接收机干扰抑制
2013-04-23廖桂生
相 飞 廖桂生 曾 操
(西安电子科技大学 雷达信号处理国家重点实验室,陕西 西安 710071)
引 言
全球导航卫星系统(Global Navigation Satellite Systems, GNSS)具有全天候的精密全球定位能力,已经广泛应用于军事、工业和民用领域.GNSS卫星运行于空间轨道,信号到达地面时极其微弱[1],不可避免地受到外界有意和无意的干扰,必须对这些干扰信号加以抑制,保证接收机正常工作.
自适应阵列处理是GNSS接收机中抑制干扰的主要方法之一[2-7].在已知信号来波方向时使用传统波束形成算法如最小方差无畸变响应(Minimum Variance Distortionless Response,MVDR)算法等能够充分抑制干扰,但是在GNSS应用背景下,GNSS卫星的精确导向矢量通常难以获得,使得波束主瓣指向产生偏差,损失信号功率.针对这一问题,目前已提出了多种盲自适应波束形成算法,文献[8]提出的功率倒置法不需信号导向矢量,能有效抑制强功率干扰,但不对信号增益约束.文献[9]基于时域循环相关思想,提出了利用全球定位系统(Global Positioning System,GPS)信号同一符号内扩频码序列的重复性实现波束形成的方法.然而,上述波束形成算法主要考虑干扰的抑制性能,没有考虑波束形成后信号的信噪比变化.文献[10]指出使用自适应算法抑制干扰后会造成信号能量损失,造成GNSS接收机定位精度变差.
针对上述问题,本文提出了一种能提高输出信干噪比的波束形成算法.最大信噪比准则[11]给出了最大化输出信噪比的最优权.但是接收机中的GNSS信号是负信噪比信号,其自相关矩阵难以获得.利用GNSS信号中扩频序列的强自相关性得到相关前及相关后的信号协方差矩阵,通过最大输出信干比的等效形式计算自适应权.GNSS信号是调制信号,使用快拍估计其协方差矩阵时,符号翻转会造成信号相消.本文用GNSS信号与参考信号多个相关峰值估计GNSS信号的自相关矩阵,能避免符号翻转的影响.仿真与实测结果说明本算法在不需要GNSS信号导向矢量的前提下,在干扰抑制性能与功率倒置法和SCORE算法相近时能够获得更好的信号增益.由于不需要导向矢量做波束形成,因而对阵列误差不敏感,具有良好的误差稳健性,最后通过仿真和实测结果验证了本文方法的性能.
1 信号模型
GNSS接收机使用N元等距线阵.设接收信号中包含K颗GNSS卫星信号和P个干扰,经过下变频和采样后的接收信号可表示为
(1)

2 基于自相关的波束形成算法
通常情况下,导航信号进入接收机后,由码锁定环和相位锁定环等相关硬件实现对信号的捕获与跟踪,然后进行解算处理.GNSS信号的信噪比对接收机定位性能有很大影响,信噪比过低将导致定位精度严重下降甚至于无法捕获及跟踪.在抑制干扰的过程中应该避免对GNSS信号的信噪比产生损失.我们期望在抑制干扰同时利用阵列增益增加输出GNSS信号的信噪比.
假定GNSS信号与干扰、噪声互不相关,接收信号x(n)的协方差矩阵可写为
(2)

(3)
考虑PRN(Pseudo-random noise code number)1卫星发射的GNSS信号,设其对应的参考信号为
r1(n)=g1(n)cos(w1n).
(4)
式中,g1(n)为PRN1卫星对应的扩频序列.接收信号x(n)与参考信号r1(n)的相关值ci(m)可表示为
(5)
式中:xi(n)为第i个阵元收到的信号,i=1,2,…,N;T为积分长度.构造向量c(m)=[c1(m),c2(m),…,cN(m)]T,协方差矩阵为

(6)

在解扩过程中,其他卫星信号和干扰受到抑制.考虑到GNSS信号功率微弱,Rc,1中其他卫星信号与PRN1参考信号的相关值可以忽略,则
(7)
由接收信号x(n)求得的协方差矩阵Rx中,由于GNSS信号的功率极低,其自相关矩阵受干扰和噪声的影响而无法估计.而在相关值的协方差矩阵Rc,1中,虽然GNSS信号的自相关矩阵获得扩频增益,但干扰在解扩后依然存在,所以Rx和Rc,1都不能作为GNSS信号相关矩阵的估计.
对Rc,1进行特征值分解得到
(8)
式中:λi为Rc,1的特征值;vi为λi对应的特征矢量.通常,接收信号x(n)中干扰功率明显大于噪声功率,所以Rc,1的特征值满足λ1>λ2>…>λP+1>λP+2=…=λN.由最小特征值估计噪声功率可得
(9)

(10)
考虑优化问题
(11)
w为阵列加权.由式(3)可知wHRxw为干扰加噪声输出功率.由式(10)有
(12)
式中,Ps=wHRs,1w为PRN1信号输出功率.式(11)可以写成
(13)

因此,式(11)中的优化目标和最大化输出信干噪比等价.文献[11]给出式(11)的最优权为矩阵对(C,Rx)的最大广义特征值对应的特征矢量,即
Cwopt=λmaxRxwopt.
(14)
式中:λmax为矩阵对(C,Rx)的最大广义特征值;wopt为λmax对应的特征矢量.
本算法利用了GNSS信号中扩频序列的相关性质,由于参考信号与卫星是一一对应的,因而算法中的wopt只针对所用参考信号期望的卫星.实际中,GNSS接收机有若干个并行的处理通道,在不同的接收机通道中使用不同的参考信号,利用所提方法可以分别实现对多个卫星信号的干扰进行抑制,然后实施定位解算.
3 算法实施及性能分析
3.1 符号翻转对Rc,1估计性能影响
本文所提算法需要估计相关值的协方差矩阵Rc,1.文献[13]指出为使协方差矩阵估计性能损失小于3 dB,用于估计协方差矩阵的独立样本应不小于2倍系统自由度.然而GNSS信号中包含导航电文,式(5)中的相关值中若导航电文符号发生翻转会造成扩频序列相关值严重衰减,导致样本非均匀,进而影响协方差矩阵估计.本文使用相关值峰值估计协方差矩阵,能避免符号翻转对协方差矩阵估计的影响.我们假设GNSS信号已被捕获,由式(5)得到相关峰值处的相关值矢量
(15)
式中T0为相关时间.将式(1)代入式(15)得到

(16)
为了简化形式,以下只考虑GNSS信号PRN1的相关值,而忽略其他信号分量,得到
(17)

θ1)·(g1(n)cos(w1n))*] .
(18)
由于相关值峰值是GNSS信号和参考信号完全匹配的结果,所以,GNSS信号内的符号必然不会发生翻转.忽略载波信号可得
(19)
那么协方差矩阵
(20)
使用相关值峰值估计协方差矩阵能够避免符号翻转对相关值幅度产生影响.使用相关峰值估计Rc,1带来的另一个好处是能够最大化利用扩频增益,增加GNSS信号自相关矩阵估计精度.
3.2 GNSS信号多普勒捕获误差对所提方法影响
由于卫星和接收机之间的相对运动,接收机接收的GNSS信号载波带有多普勒频偏.多普勒频偏对相关值的影响可表示为[1]
(21)
式中:fd为多普勒频率;T为相干积分时间;c(τ)为接收GNSS信号与参考信号相关值.由式(21)可知,当接收信号存在多普勒时,相关值受到sinc函数的调制而严重下降,如图 1所示.

图1 多普勒对相关值的影响
图1中信号的积分时间T设为1 ms.为了减轻多普勒对相关值的影响,需要预先补偿接收GNSS信号的多普勒频率.一般情况下,接收的GNSS信号多普勒频率范围在-10 ~10 kHz.由图1可知,当多普勒为零时,参考信号与GNSS信号的相关值最大.利用这一特性,通过改变本地信号的载波频率,搜索最大相关峰值能够获得接收GNSS信号的多普勒频率.由于搜索步长的限制,通过搜索得到的载波频率仍然具有剩余的多普勒,设补偿后的剩余多普勒频率为Δf,GNSS信号的相关矩阵为
(22)
多普勒频偏对算法的影响主要在于损耗Rc,1中GNSS信号的自相关值,降低扩频增益.考虑积分时间为1 ms时,为了保证该损耗不大于1 dB, 多普勒剩余频率应保持在500 Hz内,这一捕获精度较容易满足.
4 仿真与实测结果
4.1 仿真结果
使用MATLAB软件作为仿真平台,GPS信号为L1=1 575.42 MHz上的C/A码信号,天线为半波长等间距排列的4元方阵.中频设定为15.345 MHz.其余参数在各仿真情况中具体说明.SCORE方法指文献[9-10]中提出的算法.
仿真1 假设只有一个窄带干扰的情况,干扰信号形式为单频余弦波,频率为15 MHz,信号和干扰的具体参数如表1所示.

表1 窄带干扰仿真参数
由图 2可见三种算法均能够准确对干扰方位形成零陷.由表 2可知各方法干扰抑制性能相近.但是与其余两种算法相比,本文方法能够明显提高输出信干噪比,信号增益接近4阵元阵列增益的上限6 dB.表 2中信号增益通过对各个算法的阵列加权值进行模归一,而后分别统计输入输出信号功率,得到信号增益,下同.

表2 窄带干扰抑制结果

(a) 本文算法

(b) 功率倒置法

(c) SCORE方法图2 窄带干扰抑制结果
仿真2 假设3个干扰的情况:干扰1为单频连续波,频率为15 MHz;干扰2为色噪声,中心频率15 MHz,带宽为2 MHz;干扰3为色噪声,中心频率为16 MHz,带宽为2 MHz,如表3所示.

表3 多干扰情况仿真参数
由图 3可见,各算法对3个干扰方向都形成深零陷,3个干扰得到了很好的抑制.但是在3个干扰的情况下,因为阵列的自由度已经耗尽,所以对信号的增益不理想,但如表4可知,本文方法仍能够提供最高的信号增益.

(a) 本文算法

(b) 功率倒置法

(c) SCORE方法图3 多个干扰的抑制情况

信号增益/dB输出信干噪比/dB所提方法-0.83-21.03功率倒置法-1.12-21.30SCORE方法-1.05-21.12
4.2 实测数据分析
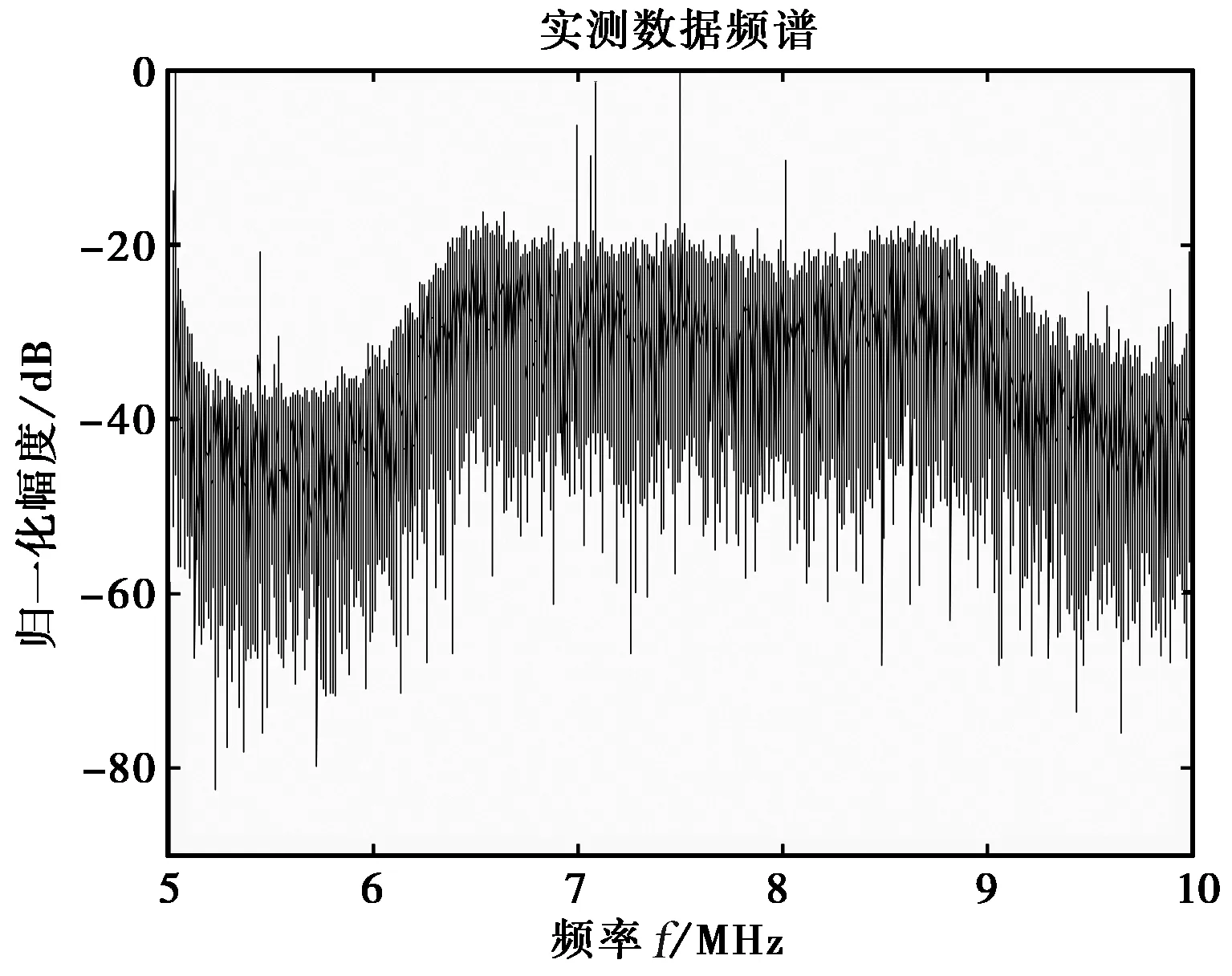
GPS接收天线阵列为半波长排列的4元方阵,相邻阵元间距为半波长.接收L1=1 575.42 MHz上的C/A码GPS信号.中频为7.5 MHz,采样率为10 MHz.实测GPS信号加噪声在中频输出端的功率约为-90 dBm,每个天线单元射频到中频的增益为42 dB;干扰信号功率约-50 dBm,即干信比40 dB.实验中设置的干扰信号形式为单频余弦波,频率为1 575.42 MHz.干扰由Agilent E4438C信号发生器产生后通过一根垂直铁杆架设的圆极化小天线发射.干扰来波方向在图4所示的坐标系下为方位角θ=0°,俯仰角φ=30°.
图 4(a)所示为接收信号的频谱,幅度归一化后取dB.图 4(b)所示为接收信号与卫星6参考信号直接相关的结果.图 4(c)为经过本文方法处理后输出信号与参考信号的相关结果,本文算法在进一步抑制干扰同时提升了GPS信号的能量,得到明显的相关峰.由图 4(d)输出信号频谱可知,输出信号中干扰成分已被抑制.

(a) 接收数据的频谱

(b) 接收数据与参考信号的相关值

(c) 本文方法处理后的相关结果
(d) 本文方法处理后输出信号频谱图4 实测PRN6卫星单频干扰抑制结果
图5和图 6分别为功率倒置方法和SCORE方法处理实测数据后的结果.比较图5(a)与图 4(c)可知本文算法得到的相关结果明显优于功率倒置法.图 6(a)所示SCORE方法得到了较明显的相关峰,但是与图 4(c)对比相关旁瓣可知,图 4(c)中相关峰值较图 6(a)中相关峰值更大.所以本文算法对接收的GPS信号的增益比功率倒置法和SCORE方法更好.图 5(b)和图 6(b)与图 4(d)的比较结果与这一结论吻合.

(a) 与参考信号的相关结果

(b) 输出信号的频谱图5 功率倒置方法处理结果

(a) 与参考信号的相关结果

(b) 输出信号的频谱图6 SCORE方法结果
仿真及实测数据结果表明,本文方法在多种干扰场景下均能够稳定地提供良好的处理性能,与功率倒置法和SCORE方法相比,所提方法能够在抑制干扰的同时保证输出中的GNSS信号信干噪比最大化.同时,因为计算波束形成的权值不依赖阵列流型,因此对阵列误差有很强的稳健性.
5 结 论
本文提出了一种抑制导航信号中干扰的波束形成算法,保证抑制干扰的同时能够使GNSS信号增益最大.本方法不需要预先知道GNSS信号来波方向的先验信息,同时对阵列误差稳健.与现有方法相比,在干扰抑制的同时能够保证最大的信干噪比输出,从而提高GNSS接收机后续处理性能.后续将研究其快速算法,使之应用于导航信号实时抗干扰.
[1] MISRA P, ENGE P. Global Positioning System: Signals, Measurements and Performance[M]. 2nd ed. Lincoln: Ganga-Jamuna Press, 2006.
[2] 冯 起, 朱 畅, 袁乃昌. 卫星导航接收机自适应阵仿真测试评估[J]. 电波科学学报, 2008,23(5):847-850.
FENG Qi,ZHU Chang,YUAN Naichang. Evaluation of adaptive array for satellite navigation receivers[J]. 2008,23(5): 847-850.(in Chinese)
[3] LI M, DEMPSTER A G, BALAEI A T, et al. Switchable beam steering/null steering algorithm for CW interference mitigation in GPS C/A code receivers[J]. IEEE Transactions on Aerospace and Electronic Systems, 2011,47(3):1564-1579.
[4] WANG R, YAO M, CHENG Z, et al. Interference cancellation in GPS receiver using noise subspace tracking algorithm[J]. Signal Processing, 2011,91(2):338-343.
[5] GONG Wenfei, SUN Xin. An improved reduced-rank STAP interference suppression method in design of GNSS receivers[J]. Science China Information Sciences, 2012(10):2329-2342.
[6] 黄国胜, 易争荣, 帅 涛, 等. 多点约束空时抗干扰算法的研究[J]. 通信学报, 2012,33(6):157-163.
HUANG Guosheng,YI Zhengrong,SHUAI Tao,et al. Study on a multi-satellite constrained space-time anti-jam algorithm[J]. Journal on Communications, 2012,33(6): 157-163.(in Chinese)
[7] 赵宏伟, 廉保旺, 冯 娟. GNSS抗干扰接收机的自适应波束形成算法[J]. 系统工程与电子技术, 2012,34(7): 1312-1317.
ZHAO Hongwei,LIAN Baowang,FENG Juan. Adaptive beamforming algorithm for space-time interference suppression in GNSS receiver[J]. Systems Engineering, and Electronic, 2012,34(7): 1312-1317.(in Chinese)
[8] COMPTON R T. The power-inversion adaptive array: concept and performance[J]. IEEE Transactions on Aerospace and Electronic Systems, 1979,15(6):803-814.
[9] WEI S, AMIN M G. A self-coherence anti-jamming GPS receiver[J]. IEEE Transactions on Signal Processing, 2005,53(10):3910-3915.
[10] O'BRIEN A J, GUPTA I J. Comparison of output SINR and receiver C/N0for GNSS adaptive antennas[J]. IEEE Transactions on Aerospace and Electronic Systems, 2009,45(4):1630-1640.
[11] VAN TREES H L. Optimum Array Processing, Part IV of Detection, Estimation, and Modulation Theory[M]. New York: John Wiley & Sons, 2002.
[12] NAGUIB A F. Adaptive Antennas for CDMA Wireless Networks[D]. Stanford: Stanford University, 1996.
[13] REED I S, MALLETT J D, BRENNAN L E. Rapid convergence rate in adaptive arrays[J]. IEEE Transactions on Aerospace and Electronic Systems, 1974,10(6):853-863.
