PWM 驱动系统中的对称功率滤波器设计
2013-04-20曹培培
曹培培, 吴 晔
(上海无线电设备研究所,上海200090)
0 引言
PWM 功率驱动具有调速范围宽、快速性好和效率高的优点,在数字化伺服控制系统中得到了广泛应用。但是其开关噪声的频带宽、幅度大、辐射强,会对控制回路造成严重的干扰,破坏系统稳定性[1]。所以,消除开关噪声尤为重要。
PWM 功率驱动系统中的开关噪声问题得到了国内外学者的重视,美国Glenn研究院的学者提出了一种多级滤波器的设计方案[2],APEX 公司也基于SA03 型功率放大器设计出了一种Power Design软件[3],以上两种方案都是采用分割电感法的多级LCR 滤波器,虽然可以获得一定的抑制效果,但是其结构复杂,功耗偏大,同时也增加了设计难度。
本文以某高精度直接驱动式伺服跟踪平台为研究对象,针对PWM 功率驱动引起的噪声干扰问题,提出了一种新型的对称功率滤波器。根据滤波器的拓扑结构,建立其数学模型,并对其传递特性进行仿真分析。最后,通过实验验证了滤波器对噪声的抑制效果。
1 PWM 功率驱动系统中的噪声分析
直接驱动式伺服系统硬件结构如图1所示,包括了DSP电路、CAN 通信电路、PWM 功率驱动电路和A/D 采样电路。
测试结果表明,未加入滤波网络时,控制回路的地线存在与开关频率(30kHz)相近的高频噪声,影响了A/D 采样结果的精度。此外,电路中的基准电源同样受到辐射干扰,输出波形不稳定。基于以上问题,控制系统的稳定性和精度都无法得到保证。
经过分析,产生干扰的主要原因为:空间辐射和传导耦合。电机功率驱动电路在每次进行PWM 斩波调制时,会产生很大的开关噪声和电磁干扰,它不仅影响PWM 驱动电路,而且还会通过电源和地进入控制回路中,干扰路径如图1所示。
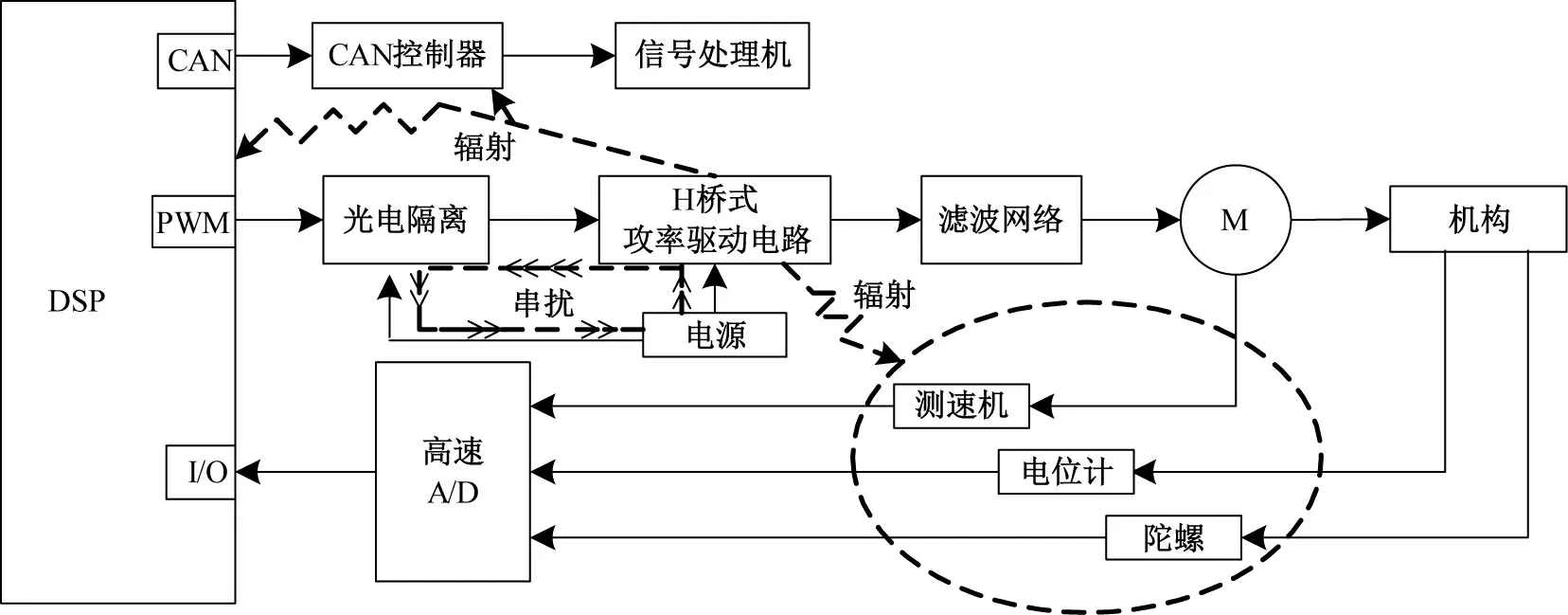
图1 控制系统硬件电路
抑制干扰的方法有很多种,例如电流平波、屏蔽、滤波和信号隔离等[1]。其中,电流平波需要在电机两端串接较大感值的电感,这种措施虽然可以抑制高次谐波,但会增加低频有用信号的衰减。此外,由于空间的限制,难以实现完全屏蔽和隔离。基于以上原因,选取滤波作为主要解决方案。
2 对称式功率滤波器设计
对称式功率滤波器不仅要保证足够的高频衰减,而且要有足够高的电流响应能力,以满足高精度动态伺服跟踪要求[4]。现有的一阶LCR 滤波器不能兼顾带宽和高频衰减要求,所以必须提高滤波阶次。
2.1 对称式滤波器的拓扑结构
PWM 功率驱动系统中,功率放大器输出到电机两端的是一对互补对称的方波,所以滤波网络的拓扑结构也必须对称。综合上述一阶LCR滤波器和多级分割电感式滤波器的优点,提出了一种新型的滤波器拓扑结构,如图2所示。
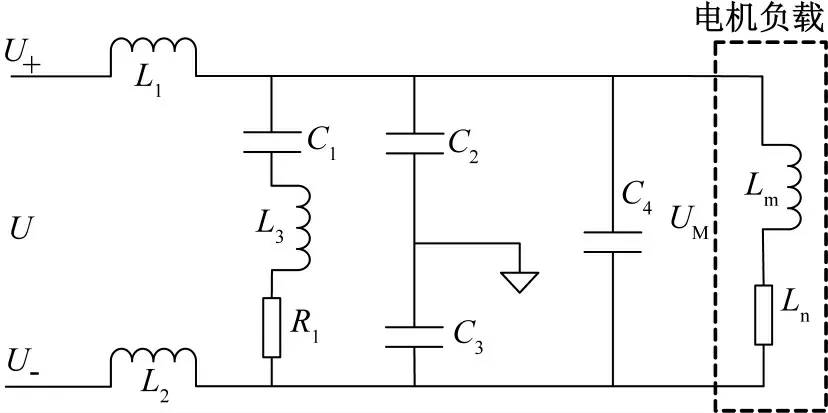
图2 对称式PWM 滤波网络拓扑结构
2.2 对称式功率滤波器频率特性分析
利用阻抗分析原理,将滤波网络分割成两个相同结构的电路,如图3所示。
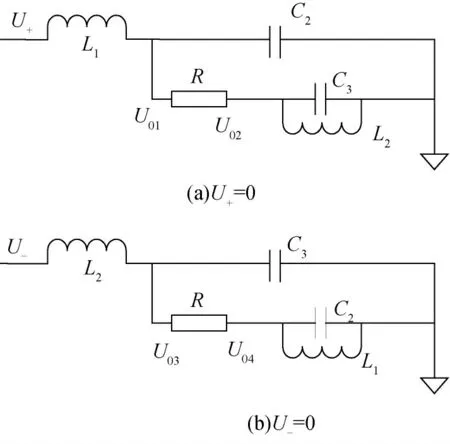
图3 滤波网络分割图
令
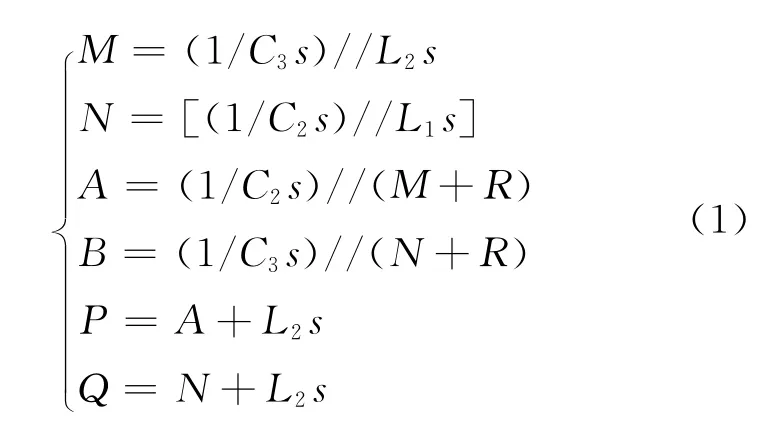
得
由 图3 可 见,R = (1/C1s + L3s +R1)//(1/C4s)//(Lms+Rm)。当U+=0时,R 两端的电压为UO1、UO2,当U+=0时,R 两端的电压则为UO3、UO4。
由于该滤波网络为对称结构,所以
再由式(1)、(2)和(3)得到滤波网络的传递函数为

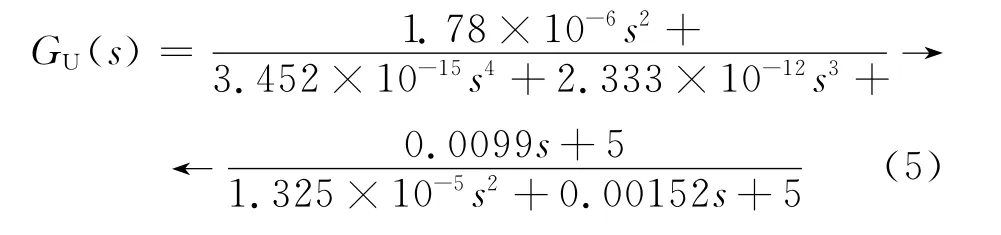
研究对象中伺服电机的内阻Rm=5Ω,电感Lm=5mH,供电电压VM=24V,PWM 载波频率f=30kHz。设计要求纹波峰值应小于100mV,即频率在30kHz处的衰减应大于-48.9dB。根据滤波网络的传递特性,设计得到一组滤波参数为L1=L2=200μH,C1=15μF,C2=C3=1μF,C4=6.8μF,R1=10Ω。将数值代入式(4),得到滤波器传递函数为
滤波器传递特性如图4所示,图中A 点坐标为(1.69kHz,-3dB),B 点坐标为(30kHz,-50.3dB),即滤波器的带宽为1.69kHz,在30 kHz处的衰减为-50.3dB,保证了足够的带宽和高频衰减量。图4中的传递特性曲线上存在谐振峰,它并不影响系统的稳定性,反而可以保证足够的闭环带宽。
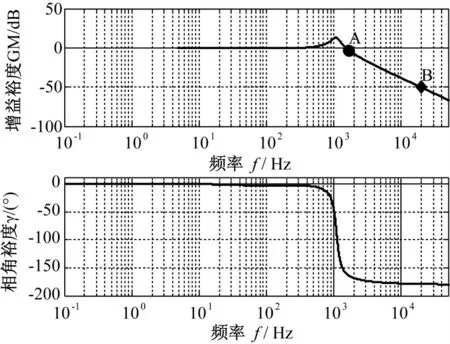
图4 PWM 对称功率滤波器波特图
从滤波网络的拓扑结构和传递特性可以看出,L1、L2和C1值越大,带宽越小,高频衰减越大。C4与R1则主要用于调节系统的谐振和阻尼,其值越大,谐振越小。C2和C3的主要作用消除共模噪声,选取不当会引起较大共模分量。
2.3 滤波器对控制回路的影响
稳定跟踪平台控制回路采用双环路结构,如图5所示,内环由测速机构成速度反馈回路,完成对电机速度的控制,外环由电位计构成位置反馈完成对机构位置的控制[5]。
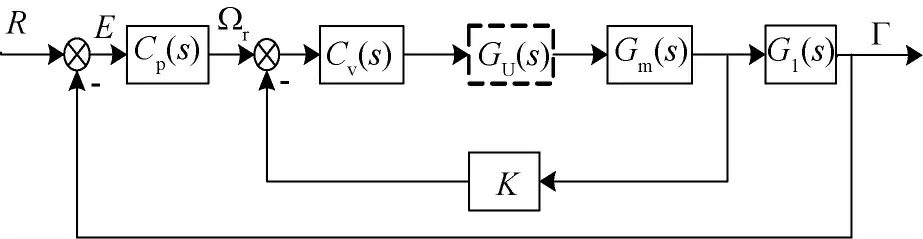
图5 控制回路模型框图
图5中,R 为控制角;E 为角误差;Ωr为参考角速度;U 为驱动电压;Ω 为电机角速度;Γ为天线指向角;Gm(s)为电机传递函数;Gl(s)为机构传递函数;K 为测速机反馈系数;Cv(s)为速度环控制律;Cp(s)为位置环控制律。
图6为滤波网路加入控制回路前后的波特图对比,从系统开环波特图中可以看出,未加入滤波网络之前系统的带宽为47.5 Hz,相角裕度为59.7°,加入滤波网络之后系统的带宽保持不变,谐振峰以及较大的相位滞后都出现在带宽以外,这说明滤波网络并不会改变系统传递特性。

图6 滤波前后控制回路的频域仿真
3 仿真和实验结果分析
3.1 Multisim 环境下时域仿真和实验结果对比
按照上述滤波器选定的器件参数,在Multisim 环境下建模,并进行时域仿真。由图7 可以看出,滤波器输出的峰峰值为±85mV,实测滤波器输出结果的峰峰值为±88.5mV。实测结果相比仿真结果存在±3.5 mV 的偏差。经过分析,产生偏差的主要原因为:滤波器元器件参数不一致,PCB布线也不完全对称。此外,在方波信号的上升沿和下降沿会产生30kHz毛刺,但是从实际滤波结果可以看出,该毛刺被抑制在±100mV以内,不会造成很强的辐射干扰。
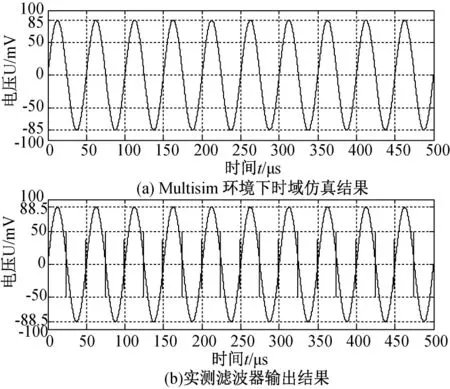
图7 滤波器输出的时域仿真结果和实测结果
3.2 滤波前后传感器信号采样对比
在控制回路未加入滤波网络时,陀螺电压和电位计电压采样结果毛刺很大。从图8可以看出,将滤波网络加入控制回路后,滤波器可以将陀螺电压和电位计电压的毛刺压制在±100mV 范围内,噪声辐射强度很弱,不会影响控制回路性能。
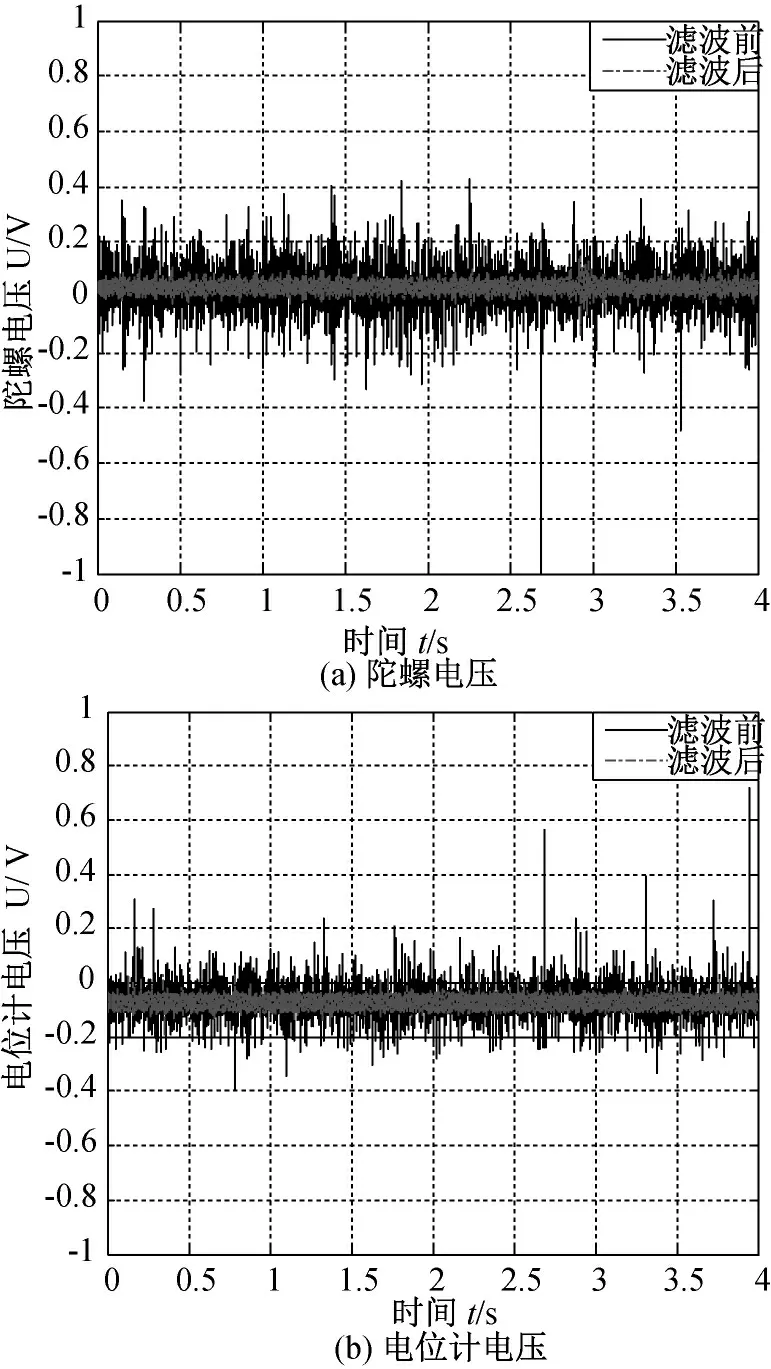
图8 滤波前后模拟信号电压采样结果
4 结论
本文分析了PWM 驱动系统中存在的开关噪声问题,比较了分割电感式和一阶LCR 功率滤波器的优缺点,提出了一种新型的对称式滤波器,并对滤波网络的传递特性进行了频域和时域仿真分析。实验结果表明,该滤波器将模拟信号的噪声幅度抑制在±100 mV 以内,将开关噪声的辐射干扰抑制在允许范围内。若滤波器中的元器件能够经过严格筛选,功放输出布线能够严格对称,滤波效果将会得到进一步改善。
[1] 党永华.某PWM 驱动系统中干扰问题的分析[J].火控雷达技术,2005,34:82-84.
[2] Barbara H.Kenny,Walter Santiago.Filtering and Control of High Speed Motor Current in a Flywheel Energy Storage System [C].International Energy Conversion Engineering Conference,2004.
[3] Barbara H.Kenny,Walter Santiago.Filtering and Control of High Speed Motor Current in a Flywheel Energy Storage System [C].International Energy Conversion Engineering Conference,2004.
[4] 李海霞,韩丰田.高精度惯导平台低噪声PWM 功率驱动装置设计[J].清华大学学报,2009,49(5):668-672.
[5] Apex Microtechnology Corp.Low Pass Filtering[Z].2001.
[6] 张艳,刘杨,陈峻山.导引头伺服系统控制回路Anti-Windup设计[J].制导与引信,2011.32(3):5-8.
