遥操作工程机器人运动觉提示平台的设计与实现
2013-03-21袁佳洁李笑
袁佳洁,李笑
(广东工业大学机电工程学院,广东广州510006)
具有临场感技术的遥操作工程机器人在一些人类难以接近的场合,如地震、冰灾等一些自然灾害搜救现场,具有广泛的应用前景。临场感技术以人为中心,通过各种传感器将远地机器人与环境的交互信息(包括视觉、力觉、触觉、听觉、运动觉等)实时地反馈到本地操作者(人)处,生成和远地环境一致的虚拟环境,使操作者产生身临其境的感受,从而实现对机器人带感觉的控制,完成作业任务[1]。运动觉是临场感的重要组成部分,具有运动觉提示的遥操作工程机器人能使操作者更逼真地沉浸入机器人环境当中,更有效地控制和操作机器人。
国内外学者对遥操作工程机器人的运动觉提示进行了大量研究[2-4]。文献[4]提出了一种遥操作工程机器人六自由度运动觉反馈方法,该方法采用6个液压缸驱动平台,通过位移传感器检测出缸的位移,构成闭环控制系统,实现了对工程机器人的六自由度运动觉反馈,但结构较为复杂。而机器人在一般工程作业现场,很少有六自由度的复杂运动,多为俯仰、翻滚和升降的复合运动,三自由度运动觉反馈基本可以满足要求。因此,作者设计了一种三自由度运动觉提示平台,该平台结构简单,实现了机器人的三自由度运动提示。
1 平台系统设计
1.1 平台结构设计
图1为遥操作工程机器人运动觉提示系统。该系统主要由工程机器人、运动觉提示平台和计算机组成。操作者坐在平台座椅上通过手柄操纵工程机器人作业,机器人运动信号通过安装在机器人端的加速度传感器检测,并送入计算机。计算机输出平台控制信号,控制平台跟随工程机器人运动,对操作者进行运动觉提示。
作者设计的运动觉提示平台主要由底板、3个液压缸、连杆机构、支承板、座椅、手柄等组成,可使平台产生俯仰 (± 17°)、翻滚 (± 17°)和升降(±100 mm)三自由度运动。

图1 遥操作工程机器人运动觉提示系统
1.2 平台液压系统设计
平台液压系统的原理如图2所示,油源压力由溢流阀4 调定,由蓄能器8 稳压。改变各电液比例方向阀输入电压信号可分别控制各液压缸的位移,液压缸的位移通过内置的位移传感器检测。

图2 平台液压系统原理图
1.3 平台测控系统设计
平台测控系统原理如图3所示,主要参数如表1所示。
安装在远端工程机器人的传感器3个轴的加速度信号和3个液压缸的位移信号经数据采集卡采集,完成A/D转换,输入到计算机进行控制运算,得到控制信号,经模拟量输出卡完成D/A转换,输出给3个比例方向阀。

图3 测控系统原理图

表1 系统主要参数
2 三自由度运动觉提示方法
图4为平台三自由度运动觉提示流程图。加速度传感器检测工程机器人运动的俯仰角θr、翻滚角φr和升降位移wr,输出沿其敏感轴x、y 和z的加速度ax、ay和az。通过信号转换运算得到机器人的俯仰角θ、翻滚角φ 和升降位移w 三自由度运动信息。通过运动学逆解,得到3个液压缸的位移设定信号S1、S2和S3。位移传感器将液压缸位移信号S'1、S'2和S'3反馈给控制器,构成闭环控制系统。对平台进行运动学正解后,得到平台运动的俯仰角θ'、翻滚角φ'和升降位移w'。将其分别与测得的机器人运动的俯仰角θ、翻滚角φ 和升降位移w 进行比较,可分析平台的跟随特性。

图4 运动觉提示流程图
2.1 运动信号的检测
加速度传感器的敏感轴的坐标系如图5所示,定义x轴与水平面的夹角为俯仰角θ,y轴与水平面的夹角为翻滚角φ。

图5 加速度传感器敏感轴坐标系
当传感器放置在水平面时,俯仰角θ为0,在其各轴方向上的加速度分别为:

式中:g为重力加速度。
当加速度传感器x轴与水平面产生俯仰角θ时,如图6所示,在其各轴方向上的加速度分别为[5]:

由式(2)可得俯仰角为:

同理,可得到翻滚角为:

如图7所示,当加速度传感器发生三自由度运动时,z轴会产生与竖直方向的一个坡角γ,此时z轴输出加速度az为:

式中:aH为竖直方向的加速度,即升降加速度。
由式(5)得:

坡角为:

升降位移w可通过竖直方向的加速度aH两次积分得到。

图7 z 方向的加速度测量
2.2 运动学逆解
平台支承板的坐标系如图8所示。

图8 平台支承板的坐标系
由机器人运动学相关知识可以得知[6]:

式中:(Pix,Piy,Piz)为支撑板各支点的初始坐标;(P'ix,P'iy,P'iz)为支承板经俯仰、翻滚和升降运动后的坐标;i=1,2,3。
由图8所示,各支点初始坐标为:

式中:R为过平台三支点圆的半径。
平台连杆结构示意图如图9所示。
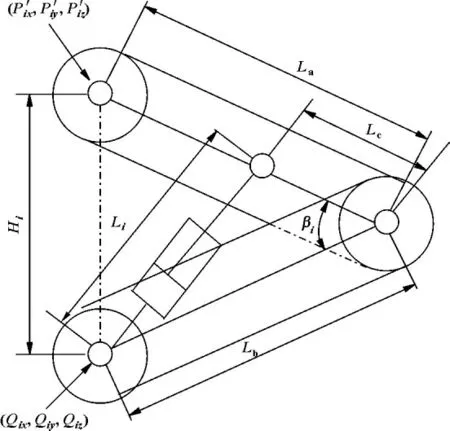
图9 平台连杆结构示意图
由图9所示的几何关系得:


式中:(Qix,Qiy,Qiz)为底板各支点的坐标;Si为各缸的实时位移;Si0为各缸的初始位移。
底板各支点的坐标为:

式中:H0为平台初始化的高度。
由式(8)— (18)可求得各缸的实时位移Si与俯仰角θ、翻滚角φ 和升降位移w的关系。将解算出的各个缸位移设定信号S1、S2和S3与传感器检测到的位移S'1、S'2和S'3之间的偏差作为控制器输入信号。
2.3 运动学正解
根据平台结构,得:

由式(12)、式(13)和式(19)可得到:

由平台几何关系,可知:

支承板经俯仰、翻滚和升降三自由度运动后,点P1、P2和P3主要是z坐标变化,x 和y坐标变化很小,可以忽略不计,此时新的三支点坐标组成的矩阵为:

式中:Pix、Piy为支承板各支点初始状态的坐标值。
如图10所示,如果沿x轴和y轴方向,坡角分别为-θ'和-φ'的梯度向量分别为P 和Q,设坐标系各坐标轴的单位向量分别为i,j,k,则向量P 和Q分别为:

支承板的法向量R为:

由图10可知:

这里:

由式(27)— (31)可求得:


图10 变换后支承板示意图
2.4 程序设计
图11为主程序流程图,实现的主要功能如下:数据采集、倾角和位移计算、运动学逆解、PID控制和运动学正解。

图11 主程序流程图
3 实验研究
为了验证所提出的运动觉提示方法的有效性,进行了平台运动跟随性实验研究。实验时,使传感器产生俯仰、翻滚和竖直3个自由度的运动。图12、图13 和图14分别为平台实测俯仰角、翻滚角和升降位移与加速度传感器的俯仰角、翻滚角和升降的对比曲线。可以看出,平台能较好地跟随加速度传感器的运动。

图12 俯仰角对比曲线

图13 翻滚角对比曲线
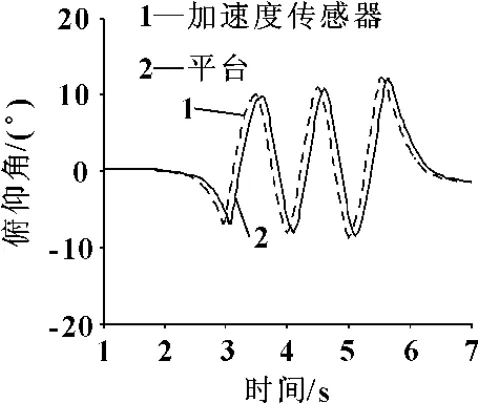
图14 升降位移对比曲线
4 结论
以获得遥操作工程机器人的临场运动感觉为目的,设计了一种三自由度运动觉提示平台。实验证明了该平台能实现对远端工程机器人运动信息的反馈。该平台结构简单,运动觉提示方法可行,对设计工程应用型远程操作机器人有参考作用。
【1】刘寒冰,赵丁选.临场感遥操作机器人综述[J].机器人技术与应用,2004(1):42-45.
【2】YAMADA H,MUKOTA S,ZHAO D,et al.Construction Tele-robot System with Virtual Reality(Development of a bilateral construction robot)[C]//4th International Conference on Virtual Systems and Multimedia,Gifu,Japan,1998:152-157.
【3】YAMADA Hironao,MUTO Takayoshi.Development of a Hydraulic Tele-operated Construction Robot Using Virtual Reality(New Master-slave Control Method and an Evaluation ofa Visual Feedback System)[J].International Journal of Fluid Power,2003(2):35-42.
【4】赵丁选,黄海东,宫文赋,等.遥操作工程机器人系统临场感技术研究:6自由度临场运动感觉反馈技术的研究进展[J].工程设计学报,2002(8):127-130.
【5】蒋瑞挺.基于加速度传感器的倾角测量[J].电子制作,2010(10):37-39.
【6】蔡自兴.机器人学[M].北京:清华大学出版社,2009.
