基于虚拟窗口的自适应车流量检测应用研究
2012-11-30王佐成薛丽霞
王佐成,贾 佳,薛丽霞
(1.重庆邮电大学 软件学院,重庆400065;2.重庆邮电大学 计算机科学与技术学院,重庆400065)
0 引 言
车流量检测是智能交通系统 (ITS)的一个重要课题,其基础是对车辆的准确检测[1-2]。 传统的车辆检测方法[3-7]由于存在着维护不方便且仅能提供一些简单信息等问题,而使其应用受到限制[8]。近年来,基于视频图像处理的交通信息检测技术与传统技术在机动性、成本、检测范围、安装和维护的方便性等方面有着显著的优点,因而在ITS信息检测中获得越来越广泛的应用。
目前已有很多机构对基于视频的车辆检测算法进行了研究,常用算法主要有:光流法[9]、背景差分法[10]、帧间差分法[11-12]。光流法在多数情况下算法较为复杂、运算量大,不适宜实时处理。背景差分法计算当前输入帧与背景图像的差值以提取目标,但需提供实时可靠的背景。帧间差分法是将序列图像中相邻两帧或三帧进行差分运算,但一般很难获得目标的完整轮廓。文献 [11]使用两帧差分和自适应阈值的方法求取运动目标,其在交通应用中产生“双影”和 “空洞”现象较为明显。文献 [12]使用三帧差分和固定阈值的方法,虽能得到较为合适的目标轮廓,但在光线不断变化等因素影响下,所采用的固定阈值适应性不强、抗噪性弱,降低了目标分割的准确度。
针对以上方法的不足,本文采用三帧差分、背景差分和自适应阈值算法,并与虚拟传感器结合,使整个检测算法只针对有实际计算价值的序列窗口图像信息进行处理,实现了快速有效的车流量统计。
1 虚拟窗口设置
车辆在道路上沿车道行驶,因而可按每个车道进行虚拟检测窗口的设置。针对首帧图像,选取合适大小的与车辆行驶方向相垂直的矩形区域作为车辆检测的处理分析窗口。窗口位置的选取首先要充分考虑摄像机安装高度和倾角的影响,所拍摄的视频是摄像头安装在道路前上方,并把虚拟窗口设置在获取图像靠近底部的位置,此时车辆间的间距比较大,不会存在相互遮挡的情况。窗口所取像素高度一般为5到10个像素,本文选取8个像素高度。此外,可在每条道路上相距合适位置设置多个虚拟检测窗口,以进一步减少误差、提高检测精度。虚拟检测窗口设置如图1所示。

图1 虚拟检测窗口
2 自适应窗口背景更新及车流量检测
2.1 快速窗口背景模型初始化
背景模型的获取有手动给出和基于统计两种方式。手动给出的方法需要人在观察到没有前景时启动相机而获得。这种方法不仅增加了人力和物力的投入,且在多数情况下很难在没有前景车辆的条件下获得背景模型,如高速公路的车辆检测系统。此时,基于统计获得背景模型的方法就显得更为方便、快速。
在实际交通场景中,某个区域存在目标的时间是有限的,序列视频图像中差异大的点一般是由运动目标移动引起的。因而在传统统计平均法模型简单、计算方便的优点之上,在虚拟检测窗口内计算并除去序列视频中差异大的图像然后再求平均,不仅进一步大大缩短了运算时间和计算机资源占用率,同时得到了更好的初始化效果。
窗口背景模型初始化[13]基本思想及步骤如下:
(1)对视频序列中一定数量帧n所对应的虚拟窗口内图像,先对每个像素值Pi(x,y)求平均,均值记为

(2)计算总差值

(3)计算平均差值

(4)去除差异大的点

(5)对P′(x,y)再求平均值,记为B0(x,y),该值即可作为初始窗口背景模型的像素值。
2.2 自适应窗口背景更新
改进的自适应窗口背景更新算法的思想为:首先从视频序列中提取出连续三帧图像对应的窗口图像信息,图像预处理[14]后进行连续两帧图像差分和动态阈值分割,将两次差分后的二值图像做相与运算,定位当前帧检测窗口内相对于前一帧发生变化的区域;发生变化的区域内图像信息使用模板背景中相应位置图像信息替换,而窗口内未发生变化的区域图像信息则用当前窗口帧相应位置图像信息进行替换。具体步骤如下:
(1)初始化各参数,令迭代参数i=2;
(2)截取视频序列中第一帧和第二帧窗口图像I1、I2并保存,将获取的初始窗口背景模型B0(x,y)作为I1对应的窗口背景;
(3)截取当前帧窗口图像Ii的下一帧窗口图像Ii+1,对其进行图像预处理;
(4)分别求出连续两帧窗口图像帧间差分的二值图BWi′(x,y)和BWi″(x,y)
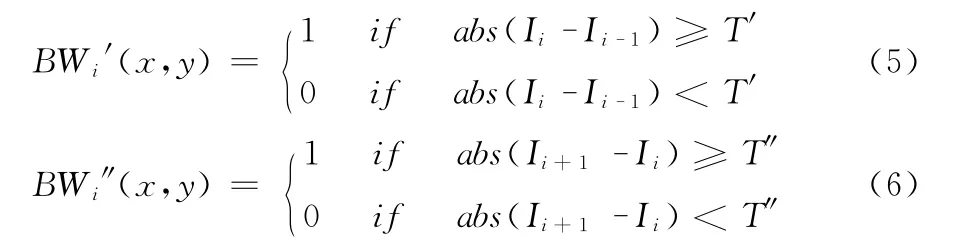
式中:BW′i(x,y)、BW″i(x,y)——第i帧与第i-1帧、第i+1帧与第i帧窗口图像帧间差分的二值图;abs(Ii-Ii-1)——第i帧与第i-1帧图像对应像素点差值的绝对值,abs (Ii+1-Ii)——第i+1帧与第i帧图像对应像素点差值的绝对值;T′、T″——采用大津法阈值分割得到的自适应阈值。
(5)将二值图像BWi′(x,y)和BWi″(x,y)相与并更新当前窗口背景Bi(x,y)

式中:BWi(x,y)——检测窗口二值图像在坐标位置(x,y)处的值,Bi(x,y)——检测窗口背景图像在坐标位置 (x,y)处的值;a——背景更新速度,它的取值对背景更新的效果有很大影响,大量实验结果发现当a取值过大会导致背景更新的频率过快,对图像中的各种变化反应过于敏感而很容易在更新后的背景中引入噪声点,而a取值过小则背景更新的频率低,就不能及时反映出场景瞬时发生的变化。这两种情况下得到的更新后背景都会大大降低车辆检测的准确度,因而a的取值需经过反复实验取最优,经验值为0.05~0.1;
(6)保存第i+1帧窗口图像为第i帧窗口图像、第i帧窗口图像为第i-1帧窗口图像,并使i自增1。如果程序此时没有结束则返回到步骤 (3)继续执行。对于第i帧图像,得到的图像Bi(x,y)即为其更新后的检测窗口背景。
2.3 自适应阈值分割
为了获得较为准确的运动车辆目标,在二值化差分后的图像时,需要选择一个合适的阈值T来分割出较高质量的运动区域。由于在交通场景中,光线和天气状况等环境因素会随时发生快速变化,而固定阈值抗噪性弱,不能及时适应这些变化,将会大大降低目标检测的准确度,因而需采用能够自适应地对环境变化作出及时反应的分割阈值。
本文采用自适应的最大类间方差法,即大津法 (Ostu)阈值分割[15-16]。它是将检测窗口图像对应的直方图在某一阈值处分割成两组R0= {0~T-1}和R1= {T~m-1},(设图像的灰度值为0~m-1级,pi为灰度值i出现的概率),则R0产生的概率为

R1产生的概率为

两组的平均值分别为

和


两组间的方差由式 (14)计算得出

从1~m-1之间改变T值,求上式为最大值时的T,也就是当被分成的两组间方差为最大时,选取该值为最终的分割阈值T。
2.4 车流量检测
所有检测窗口在同一水平线上覆盖所有待检测车道,每辆车同时只能在一个车道内运动,即使出现超车现象,该车也只能通过某个车道检测窗口一次,不存在2辆车并排挤在同一个车道窗口和同一辆车同时经过2个车道窗口的现象,因此每个车道检测窗口共存在下列4种现象:
(1)窗口内从无车到无车,表示没有车通过检测区;
(2)从无车到有车,表示有车驶入检测区;
(3)从有车到有车,表示该辆车还没驶出检测区;
(4)从有车到无车,表示车辆驶出检测区。
在车辆进入或驶出检测区时计数均可,本文采用在车辆驶入检测区时计数的方式。在每一帧图像检测后,标记当前帧是否为有车辆经过的状态,以作为判断以上4种现象并统计过往车辆个数的依据。
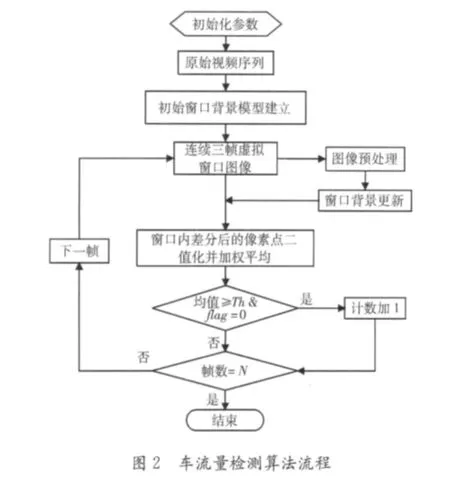
具体检测步骤为:首先初始化参数 (包括设置虚拟检测窗口和检测最大帧数N等);读入交通视频流,提取一定数量的连续帧图像,通过在虚拟窗口内计算并排除差异大图像,然后对剩余图像求均值,快速初始化窗口背景模型;模型建立后从第一帧开始提取连续三帧检测窗口图像并进行去噪、平滑等预处理;使用最大类间方差法定位目标区域并自适应更新背景,得到当前帧窗口图像的参考背景;背景差分后,获得窗口内车辆图像信息,二值化并加权平均各像素值,如果所得均值超过了某阈值Th且前一帧图像有无车辆的状态标记flag=0,则认为该区域从无车状态变为有车状态,计数器就加1并置flag=1,否则置flag=0;当检测帧数达到初始设置最大值N时,算法结束并统计出一定时间内的车流量。车流量检测算法流程如图2所示。
3 实验结果与分析
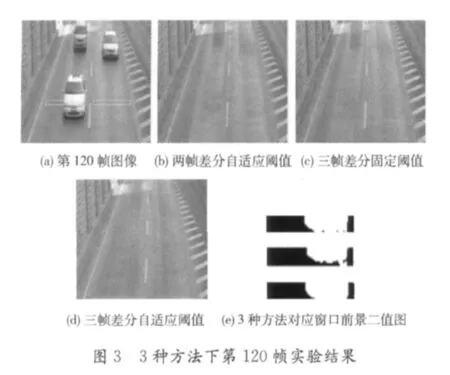
实验采用交通道路旁固定摄像头下帧大小为320×240、帧速率为25帧/s的2分钟RGB视频序列图像,使用VC++6.0和OpenCV[17]进行仿真。为了便于观察背景更新效果,实验以文献 [11]采用的两帧差分自适应阈值法、文献 [12]采用的三帧差分固定阈值法和本文采用的三帧差分自适应阈值法完整更新背景的单向2车道下检测结果及使用此3种方法得到的对应窗口前景二值图做对比;并以两帧差分自适应阈值完整背景车流量检测法、三帧差分自适应阈值完整背景车流量检测法与本文采用的虚拟窗口车流量检测法,在阴天和晴天两种场景下的实时性和准确性方面进行比较。实验中所用到的阈值为采用大津法阈值分割得到的自适应阈值。
图3(e)为依次使用这3种方法得到的第120帧左车道窗口前景二值图。对比可以看出图3(b)方法更新的背景存在重影比较明显,图3(c)方法得到的前景目标分割效果较差,而采用图3(d)方法得到的更新结果和前景二值图均比其他两种方法好。因而本文所采用的三帧差分自适应阈值法能够较为准确地检测交通车流量。
从表1结果可以看出本文检测方法平均准确率可以达到98%以上,能够满足交通车流量检测的准确性要求。表2采用3种方法分别对同一个视频文件进行检测,并统计3种方法的平均运行时间和阴天、晴天两种场景下的车辆检测准确率。实验结果可以看出,本文方法在阴天和晴天两种场景下检测准确率和图3(d)方法相当,且平均运行时间最短,能更好地满足交通车流量检测中对实时性的要求。
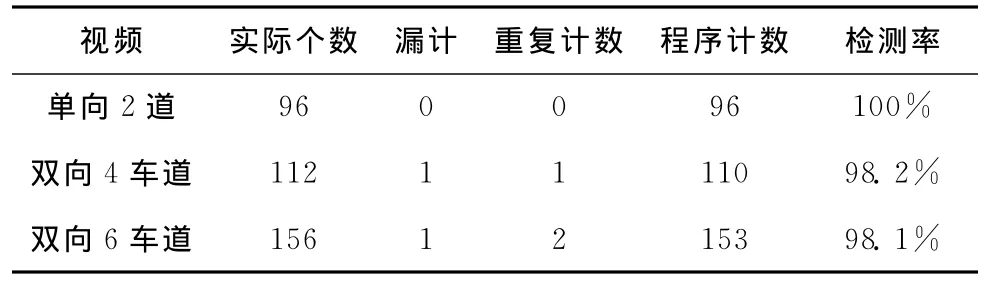
表1 不同车道车辆检测实验结果
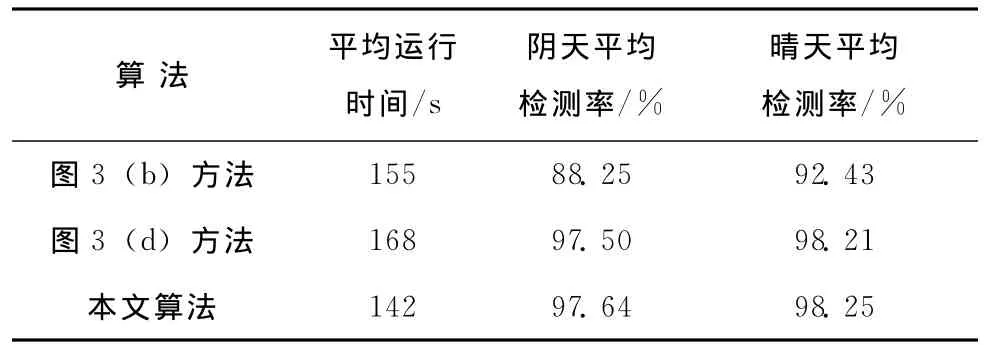
表2 阴天和晴天下实验结果
4 结束语
传统的背景提取法是对整幅图像进行计算以初始化和更新背景,本文则采用只针对帧图像中虚拟检测窗口内信息进行处理的方法,结合改进的背景更新算法快速初始化背景模型并实时更新检测窗口背景,更为有效地检测出一定时间内的车流量。这种针对虚拟窗口的计算方法,减去了对无效图像信息的处理量,加快了求取有实际价值的窗口信息的速度,提高了检测车流量的实时性。因而该方法更快速有效,在ITS中将会有广泛的应用前景。
[1]YUE Yonghong.A traffic-flow parameters evaluation approach based on urban road video [J].International Journal of Intelligent Engineering &Systems,2009,2 (1):33-39.
[2]DU Lili,WANG Guoyu.Video-based techniques for vehicle detection and shadow eliminating method [J].Modern Electronic Technique,2009,32 (3):192-194 (in Chinese). [杜丽丽,王国宇.基于视频的车辆检测技术和阴影消除方法[J].现代电子技术,2009,32 (3):192-194.]
[3]LEE S,OH S C,SON B.Heuristic algorithm for traffic condition classification with loop detector data [C].Proceedings of International Conference on Computational Science and Its Applications,2005:816-821.
[4]Whitehouse K,ZHAO F,LIU J.Semantic streams:A framework for composable semantic interpretation of sensor data[C].Proceedings of Third European Workshop on Wireless Sensor Networks,2006:5-20.
[5]TONG F,TSO S K,XU T Z.A high precision ultrasonic docking system used for automatic guided vehicle [J].Sensor and Actuators A,2005,118 (2):183-189.
[6]Coifman B.Freeway detector assessment:Aggregate data from remote traffic microwave sensor [J].Transportation Research Record,2005,19 (17):149-163.
[7]PENG Chunhua,LIU Jianye,LIU Yuefeng,et al.Review of vehicle detection sensors [J].Transducer and Microsystem Technologies,2007,26 (6):4-7 (in Chinese).[彭春华,刘建业,刘岳峰,等.车辆检测传感器综述 [J].传感器与微系统,2007,26 (6):4-7.]
[8]JIANG Dalin,MA Junqiang.Survey on video-based vehicle de-tection and tracking methods [J].Chinese Journal of Scientific Instrument,2008,29 (4):759-762 (in Chinese). [蒋大林,马军强.基于视频的车辆检测与跟踪方法综述 [J].仪器仪表学报,2008,29 (4):759-762.]
[9]CHEN Zhenxue,WANG Guoyou,LIU Chenyun.Statistics of vehicle flows based on computer vision [J].Huazhong University of Science & Technology(Nature Science Edition),2006,34 (5):46-49 (in Chinese). [陈振学,汪国有,刘成云.基于计算机视觉的汽车流量检测统计 [J].华中科技大学学报(自然科学版),2006,34 (5):46-49.]
[10]WANG Jing,BAO Wenxing.A video supported moving object detection technique based on difference algorithm [J].Computer Applications and Software,2009,26 (12):68-70(in Chinese).[王静,保文星.一种基于差分算法的视频运动目标检测技术 [J].计算机应用与软件,2009,26 (12):68-70.]
[11]XU Fangming,LU Guanming.Moving object detection based on ameliorative surendra background update arithmetic [J].Shanxi Electronic Technology,2009,39 (5):39-40 (in Chinese).[徐方明,卢官明.基于改进surendra背景更新算法的运动目标检测算法 [J].山西电子技术,2009,39 (5):39-40.]
[12]MO Lin,LIAO Peng,LIU Xun.A motion detection algo
rithm based on background subtraction and three frame differencing [J].Control & Automation,2009,25 (4):274-276(in Chinese).[莫林,廖鹏,刘勋.一种基于背景减除与三帧差分的运动目标检测算法 [J].微计算机信息,2009,25 (4):274-276.]
[13]WU Zhongshan,LEI Yunqi,WU Lvfang,et al.An algorithm for extraction and update of background [J].Journal of Xiamen University (Natural Science),2008,47 (3):348-352(in Chinese).[吴众山,雷蕴奇,吴绿芳,等.一种实用的背景提取与更新算法 [J].厦门大学学报 (自然科学版),2008,47 (3):348-352.]
[14]Rafael C Gonzalez.Digital image processing [M].RUAN Qiuqi,RUAN Yuzhi,transl.2nd ed.Beijing:Electronics Industry Press,2009 (in Chinese).[冈萨雷斯.数字图像处理 [M].阮秋琦,阮宇智,译.2版.北京:电子工业出版社,2009.]
[15]XIE Fengying,ZHAO Danpei.Digital image processing by Visual C+ + [M].Beijing:Electronics Industry Press,2008(in Chinese).[谢凤英,赵丹培.Visual C++数字图像处理 [M].北京:电子工业出版社,2008.]
[16]XU Xinzheng,DING Shifei,SHI Zhongzhi,et al.New theories and methods of image segmentation [J].Acta Electronica Sinica,2010,38 (2A):76-82 (in Chinese). [许新征,丁世飞,史忠植,等.图像分割的新理论和新方法 [J].电子学报,2010,38 (2A):76-82.]
[17]Gary Bradski,Adrian Kaehler.Learning OpenCV [M].YU Shiqi,LIU Ruizhen,transl.Beijing:Tsinghua University Press,2009 (in Chinese). [布 拉 德 斯 基, 克 勒. 学 习OpenCV[M].于仕琪,刘瑞祯,译.北京:清华大学出版社,2009.]