基于Zigbee的无线传感网在海底观测设备实时监测中的应用
2012-09-17徐燕
徐 燕
0 引言
无线传感器网络(Wireless Sensor Networks-WSN)[1],是由部署在监测区域内大量的廉价微型传感器节点组成的,通过无线通信方式形成的一个多跳自组织网络,能够实时监测和采集网络分布区域内的各种检测对象的信息,并将这些信息发送到网关节点,是一种全新的信息获取平台。具有快速展开、抗毁性,并具有低功耗、低成本、分布式和自组织的特点。近年来,无线通信技术和低功耗嵌入式技术的飞速发展,带来了信息感知的一场变革,为无线传感器网络赋予了广阔的应用前景。目前,已经广泛地应用于环境保护与检测、医疗护理、军事与安全救灾、现代交通和现代农业等领域[2]。本文使用了在传感器网络技术中比较热门的技术之一——ZigBee技术,实现了海底观测设备姿态信息的实时监测。
1 Zigbee
1.1 Zigbee技术概述[3]
无线传感器网络一般都是要求实时性的传输数据,设备通常采用电池供电,因此根据实时性、低功耗、低成本等特点和要求,2002年由美国摩托罗拉公司、日本三菱电气公司、荷兰飞利浦公司等企业共同组成ZigBee技术联盟,着手开发ZigBee技术,如今该联盟的成员已扩大为100多家企业,并在不断的壮大。
ZigBee技术特点,主要涵盖以下几个方面[8]:
功耗低:在低耗电待机模式下,两节普通5号干电池可支持一个节点使用6~24个月不等,相较于蓝牙的工作数周、WiFi工作数小时而言,这也是zigbee在通信市场占有一席之地的独特优势。
数据传输速率低:ZigBee工作速率有10Kb/s~250Kb/s,已满足低速率传输数据的应用要求。
成本低:与蓝牙相比ZigBee协议的大幅简化并且免专利费,这都大大降低了成本。
网络容量大:ZigBee设备具有强大的组网能力,每个ZigBee网络支持可达 65000个节点。一个区域内可同时存在100个ZigBee网络。
时延短:ZigBee响应速度快,其通信时延和从睡眠状态激活的时延非常短,一般从睡眠激活只需 15ms,节点入网只需 30ms,进一步节省了能耗;而蓝牙需要 3~10s、WiFi需要3s。
安全可靠:在安全性方面,ZigBee提供了基于循环冗余校验的数据包完整性检查和鉴权认证功能,采用AES-128加密算法,应用中可灵活确定网络安全属性;在可靠性方面,使用有时隙的载波监听多址接入-冲突避免(CSMA-CA)策略,同时需要固定带宽的通信业务预留专用时隙,避开了大量数据的突发性、同时性发送引起的竞争和冲突。MAC层采用完全确认的数据测传输模式,每次发送都必须等待接收方的确认信息,以此判断是否出现传输问题,是否需要进行重发。
通信范围小:根据实际发射功率的大小和应用场合的不同,ZigBee的通信有效覆盖范围平均在10~75米之间,基本能够覆盖普通的住宅或办公室环境,通过ZigBee的组网功能,传输信号覆盖面积可以扩展到整个楼宇甚至整个社区。
工作频段灵活:ZigBee采用直接序列扩频技术的2.4GHz免执照频道,并具有16个扩频通信新到,根据实际需求灵活配置。
1.2 Zigbee网络拓扑结构
ZigBee[4]网络支持星型网(Star Network),树簇型网(Cluster tree Network)和网状网(Mesh Network)三种网络拓扑结构,如图1所示:
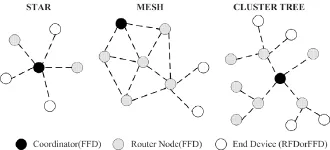
图1 ZigBee网络拓扑结构
星型网络是3种网络中最简单的一种拓扑结构,在该网络中协调器位于网络的中心并与其他子节点通信,其覆盖范围比较小,通常用于节点数量要求少,且分布较密集的场合中,如果家庭自动化、个人消费电子产品等;树簇型网络可看做星型网络的扩展和延伸,它比星型网络的覆盖范围更大,但信息传输时延也随之增大,并且在传输数据时,一旦一条路径有问题,那么在这条路径中所有的节点都不能通信;网状网络是在树簇型网络基础上实现的,它可以理解是由若干个全功能节点连接在一起组成的骨干网,这些节点之间可以对等通信,与树状网络不同的是,它是由路由器中的路由表配合来实现数据的网状路由的,因此它建立的网络可靠性高、时延小且具有自愈能力并为数据的传输提供多条路径,一条路径出现故障,节点则可以选择其他路径进行通信,但由于节点之间存在多条路径,所需存储空间开销更多。
2 海底观测设备无线监测系统的可行性研究
2.1 海底观测仪器实时姿态监测
随着世界各国海洋开发和海洋军事领域的飞速发展,对水下传感网络[5]、水下观测监视系统[6]、海底探测、环境监测、灾害防治、辅助导航、水雷探测等的需求越来越迫切。
在观测设备在水下工作时,为了标示其位置并方便取回设备,一般用浮筒加锚链,再辅以人工看护的方式来守护仪器并保证其正常工作。但在实践中,在某些恶劣风浪条件或者船舶撞断锚链时,浮筒就会飘走,这样水下仪器或设备就无法找到并取回。此外当监测设备和仪器在水下工作时,如果仪器的姿态、位置在外力作用发生了变化,可能就会有所影响,需要及时调整,而浮筒加锚链的方式也无法知道仪器的实时姿态。据此,海底观测监测中,急需引入无线通信技术或者搭建水下无线网络来保障海底设备与水上监控的信息交互。
水下无线网络技术与常规的无线技术采用的传输介质不同[7][8],由于激光极易在水中产生散射,而采用声波通信的话,水声信道的传输条件十分恶劣,特别是浅海水声信道,信道的带宽有限,取决于距离和频率,在这种有限的带宽内,声信号受强环境噪声,时变多径的影响,可能会导致严重的码间干扰(ISI)、大的多普勒频移扩展及长的传输时延。如果采用无线电波来进行水下通信,由于水下无线通信的环境复杂多变、干扰以及电磁波衰减极为严重,要在海底进行传输只能在很低频率下进行传输。水下无线射频识别技术就是采用低频段的RFID标签。
2.2 海底设备的三维姿态
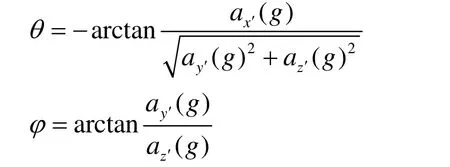
在地理坐标系中,物体在三维空间的姿态可以用航向角、俯仰角和倾斜角来表征。如果俯仰角和倾斜角都为00,那么物体被认为处于水平状态。
通过测量物体在物体坐标系中的重力加速度的分量ax′(g )、 ay′(g)、az′( g ),可求得俯仰角θ和倾斜角φ如下:
2.3 确定系统设计方案
通过以上对观测设备运行状态的分析,本文提出的采用测量重力加速度在各个坐标轴分量的方法,可以监测设备是否处于水平状态。通过无线传感器节点,可将观测设备姿态通过无线方式最终发送到协调器,协调器通过串口与PC机通信,最终实现海底观测设备的实时监测。
3 海底观察设备无线监测系统的总体方案设计
将无线传感网络应用于海底观测设备进行状态无线监测,是通过部属在设备的传感器节点来采集和处理有关特征信息,监测观测设备的姿态。通过分析,确定系统由上位机和下位机两部分组成,系统结构,如图2所示:
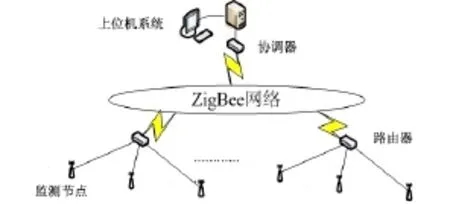
图2 系统结构图
下位机是由监测节点(ZigBee终端节点)、路由器和协调器组成的分布式无线监护网络。利用ZigBee技术自组无线通信网络,监测节点实现观测设备的实时监测,并把监测的姿态信息发送至监测中心,路由器实现无线通信数据的中转,协调器建立并维护这个通信网络且接收监护节点、路由器发送来的监测信息最后通过串口和 PC机进行数据交换。上位机是海底观测设备姿态监测系统,该部分是由协调器通过RS232与PC机中海底观测设备监测信息管理系统建立通信。该信息管理系统显示海底各个设备的姿态信息,工作人员通过此软件可以方便的观察海底设备实时姿态信息。
4 海底观测设备无线检测系统的实现
设计和实现基于ZigBee技术的海底设备检测系统,需要完成以下4个关键部分技术:姿态监测的设计与实现;节点射频模块及扩展电路设计;节点软件开发;系统上位机软件功能开发。
4.1 硬件设计
(1)加速度传感器选型及其设计
本系统选用ST公司的LIS3LV02DQ。LIS3LV02DQ是一个三轴数字输出的线性加速度计,每一个轴的数据输出频率可在640Hz以上。同时,它的测量范围为2g或者6g,也满足本设计的要求。其串行通信方式为SPI或者I2C,如图3所示:
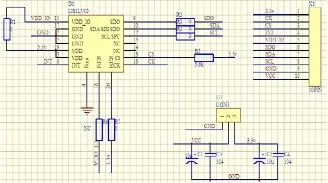
图3 LIS3LV02DQ电路图
(2)节点微处理器的选择及其设计
符合 ZigBee协议规范的射频芯片有:TI Chipcon的CC2420/30和CC2520/30、飞思卡尔(FreeScale)的MCl3192和MCl3193、美国赫立讯(Helicomm)的IP-1inkl270以及英国Jennie的JN5121等。本系统选择了TI公司的CC2530,cc2530包含增强型8051内核,可作为处理器计算物体的姿态,如图4所示:
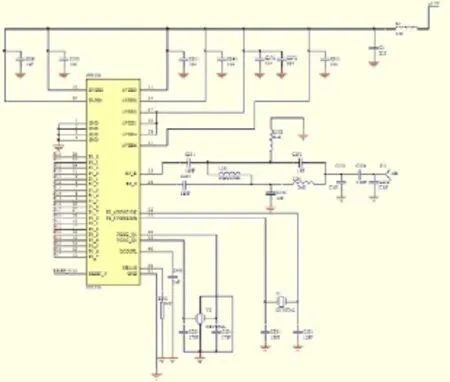
图4 CC2530的外围电路
(3)Zigbee节点结构框图
在ZigBee网络中,存在3种类型的节点,它们各司其职,协调有序地工作。根据这3种节点在本系统中的具体功能,给出具体的ZigBee节点硬件结构框图。
1)监测节点:它由微处理器(CC2530)、RF收发模块、加速度测量模块、电源管理模块组成。监测节点主要功能是监测设备的姿态信息,它将采集到的数据进行处理,计算姿态等信息,再通过RF模块发送给路由器或协调器。结构示意图,如图5所示:
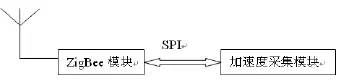
图5 监测节点结构示意图
2)路由器:由微处理器(CC2530)、RF收发模块、电源管理模块组成。其主要功能是选择最佳传输路径并分组中继转发数据,此外还有自愈ZigBee网络的功能。在网络中其数量不固定,根据应用环境和应用规模来决定。结构示意图,如图6所示:
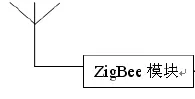
图6 路由器结构示意图
3)网络协调器:由微处理器(CC2530)、RF收发模块、电源以及通信模块接口等部分组成。在ZigBee网络中仅有一个协调器,主要负责建立网络、管理网络节点、对消息传输进行路由选择等功能。它通过RS232接口连接到PC,就可以将监测节点发送的数据传输至PC机中的海底观测设备监测信息管理系统进行解析,最后把相应的提示显示到界面上,更方便工作人员的查看。结构示意图,如图7所示:
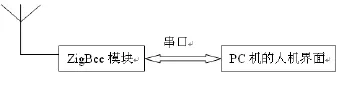
图7 网络协调器结构示意图
4.2 系统软件设计
系统软件设计主要包括终端节点软件设计、路由器节点协调器软件设计以及PC机监测中心四部分。终端节点软件部分负责设备加速度数据的采集、处理和通信功能,协调器负责整个网络的设备的数据收集和发送到PC机,PC机监测中心就可以通过收集到的数据,显示海底观测设备的姿态信息。
(1)终端节点软件设计
当节点上电开机后,开始各个硬件的初始化,初始化完毕后,节点搜索协调器建立的 Zigbee网络,并选择合适的信道加入。加入ZigBee网络的监测节点,自动上报自身的设备ID、网络地址等信息至监测中心,以便远程pc机可显示与之对应的设备的姿态信息。
监测节点的软件设计在应用层定义了加速度检测事件,系统采用中断的方式对加速度进行采集,当定时中断到来时,处理器进行数据采集,再经软件处理后计算出设备的姿态角度,最后把计算出的结果发送至监测中心由界面显示。其主程序流程图,如图8所示:
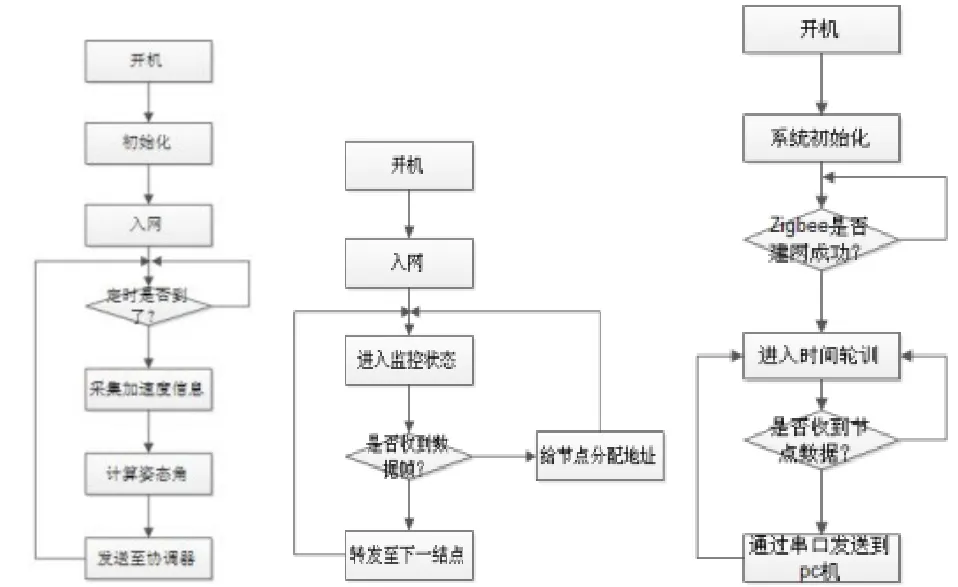
图8 主程序流程图
(2)路由节点软件设计
由于节点分布的区域较大,而ZigBee数据传输的距离有限,因此系统在布置节点时需要在合适的位置放置路由器。路由器在数据传输中起到“接力棒”的作用,可以为接收到的数据帧寻找一条最佳的传输路径,这不但可以使数据帧能够安全高效的传送到目的节点同时也大大地扩展了ZigBee网络范围。其主程序流程图如图所示。
(3)协调器软件设计
在本系统中,协调器在ZigBee网络中主要负责建网和管理,并且可以通过串行接口经RS232总线连接至PC上,很方便的处理和解析接收到的各种数据。协调器建立网络必须先满足两个条件,一是这个节点必须是FFD节点,具有协调器的功能;二是一个ZigBee网络仅且只有一个协调器;确定满足这个两个条件后,协调器将检索出一个可用的干净的信道并在此基础上建立ZigBee网络,然后选择一个唯一的PANID,协调器建网成功后,其他节点可凭借PNAID加入协调器建立的ZigBee网络中,进而实现节点之间的数据通信。
(4)上位机软件设计
海底观测设备姿态监测系统使用 Visual C++语言设计出了监测中心管理软件。该软件使用数据库技术和串口通信技术将设备姿态信息由界面显示。
该界面中每个设备号与ZigBee监测节点自定义的设备ID绑定,这样可使工作人员就可实时了解各个设备的姿态信息。
5 总结
本文详细提出并实现了基于 Zigbee的无线传感网在海底观测设备实时监测中的应用问题。该系统利用低频无线传感网技术,把海底观测监测设备的实时姿态信息传递给用户,能让用户及时了解仪器工作状态和故障信息,从而能有效地探测仪器设备的运行异常情况,减少和消除因仪器姿态异常引起的无效观测数据,提高了海底观测系统地工作效率和可信度。本技术同样适用于其它水下设备姿态和相关信息的监测,有较大的推广价值。
[1]朱仲英.传感网与物联网的进展与趋势[J].微型电脑应用.2010,(1).
[2]孙利民等编著.无线传感器网络[M].清华大学出版社.2005.5.
[3]无线龙. 物联网应用技术系列教材:ZigBee无线网络原理[M]. 北京,冶金工业出版社. 2011.9
[4]胡必武,蔡海滨.基于无线传感器网络的目标检测与跟踪系统研究[M].计算机工程与设计. 2008,第29卷,第5期.
[5]郭忠文 罗汉江. 水下无线传感器网络的研究进展[J].计算机研究与发展. 2010年3期.
[6]顾相平,金鹰. 水下无线传感器网络信道研究[J]. 计算机与现代化. 2011年10期.
[7]周启明. 水下无线传感器网络定位算法分析与研究[J].湖南工程学院学报:自然科学版. 2011年2期.
[8]周伟 来鸿飞. 水下无线传感器网络的节点精确定位[J]. 指挥控制与仿真. 2007年1期.
