ARM7在分散控制系统中的应用
2012-09-17邵继红
邵继红
0 引言
分散控制系统DCS(Distributed Control System),又称为集散控制系统或者分布式控制系统,是相对于集中式控制系统而言的一种新型计算机控制系统,它是在集中式控制系统的基础上发展、演变而来的。它是由过程控制级和过程监控级组成的,以通信网络为纽带的多级计算机系统,综合了计算机、通信、显示和控制等技术,其基本思想是分散控制、集中操作、分级管理、配置灵活以及组态方便。
本文介绍了一种典型的分散控制系统——Simax分散控制系统。Simax系统采用并行总线的通信方式,系统包括数据采集IO单元,分散处理单元DPU,以及上位机显示控制系统。
Simax系统IO单元的CPU采用ARM7。ARM(Advanced RISC Machines),是微处理器行业的一家知名企业,该企业设计了大量廉价、高性能、低功耗的RISC的处理器、相关技术及软件。ARM7是通用的32位微处理器内核,采用冯诺依曼结构,具有高性能低功耗的特性,由于其结构是基于精简指令集计算机的原理而设计的,指令集和相关的译码机制要比复杂指令集计算机简单得多,非常容易实现实时的中断响应。
1 DCS的构成和Simax的结构
从结构上划分,DCS包括过程级、操作级和管理级。过程级主要由过程控制站、IO单元和现场仪表组成,是系统控制功能的主要实施部分。操作级包括:操作员站和工程师站,完成系统的操作和组态。管理级主要是指工厂管理信息系统,作为DCS更高层次的应用,目前国内行业应用到这一层的系统较少。
DCS的控制程序:DCS的控制决策是由过程控制站完成的,所以控制程序是由过程控制站执行的。
过程控制站的组成:
DCS的过程控制站是一个完整的计算机系统,主要由电源、DPU(分散处理单元)、网络接口和IO组成。
IO:控制系统需要建立信号的输入和输出通道,这就是IO。DCS中的IO一般是模块化的,一个IO模块上有一个或多个IO通道,用来连接传感器和执行器(调节阀)。
IO单元:通常,一个过程控制站是有几个机架组成,每个机架可以摆放一定数量的模块。DPU所在的机架被称为DPU单元,同一个过程站中只能有一个DPU单元,其他只用来摆放IO模块的机架就是IO单元。
Simax系统包含过程级和操作级,其组成模式如图1。
其中,操作级主要是中央控制计算机,包括组态软件、数据采集软件、监控软件、分析软件等;控制级主要是分散处理单元(DPU)以及它控制的各种IO单元。
Simax系统中,中央控制计算机通过并行网线和以太网交换机与分散处理单元相连接,分散处理单元(DPU)通过并行总线控制它所带动的各个IO单元,IO单元分为模拟IO单元和数字IO单元,每个模拟IO单元由一块CPU卡和一块通道卡组成,可以采集电流、热电偶、热电阻等模拟量信号和输出电流模拟信号;每个数字IO单元由一块逻辑卡和一块通道卡组成,包括数字量输入卡和数字量输出卡,分别输入和输出数字信号。
应用了ARM7的Simax系统具有以下特点:
组网灵活:可根据实际需要选择不同数量的中央控制器(DPU),不同数量的 IO单元,并且可以根据实际需要对IO单元进行不同的组态和配置。
兼容性强:可与不同的的厂家、不同类别的二次仪表兼容。
可靠性高:各个IO单元互不干扰,即使有某些IO单元出错也不会影响其他单元。低功耗,低成本。
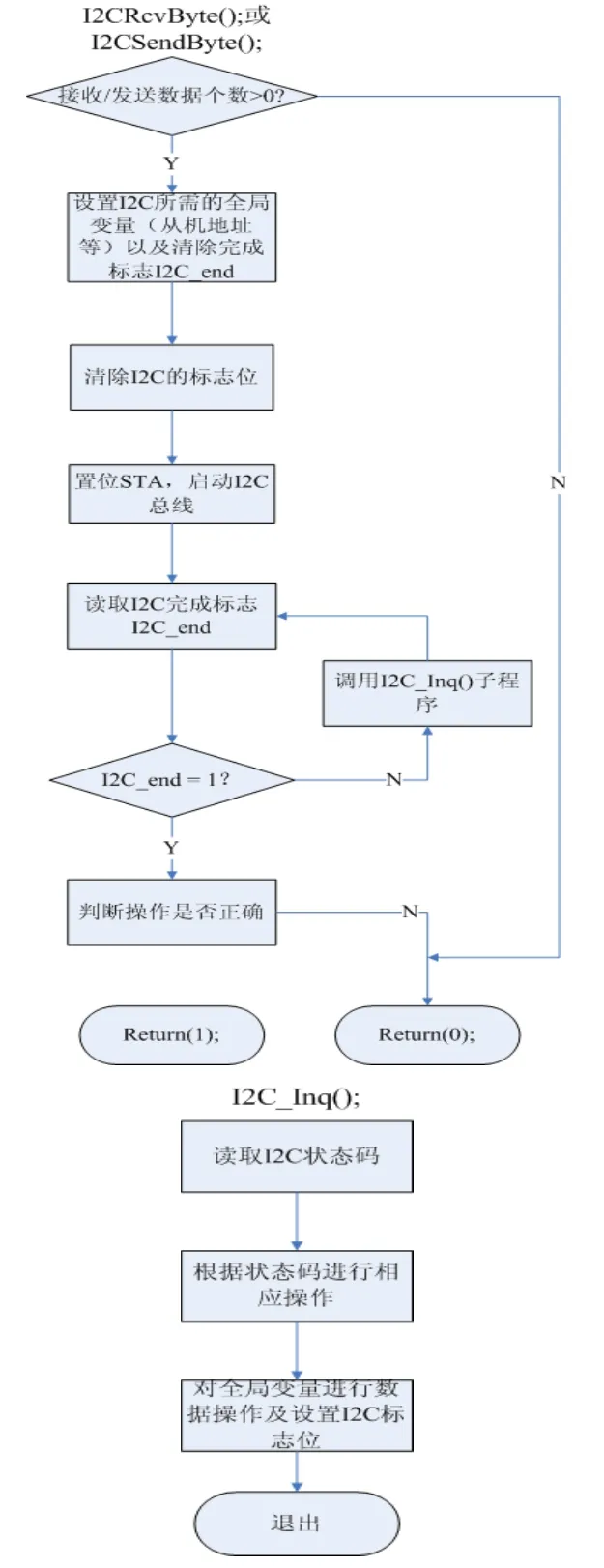
图3 I2C记录K,b流程图
2 ARM7的特性及其在IO单元中的应用
Simax系统中应用的ARM7是NXP公司的LPC2136,其具有如下特性:小型封装的32位ARM7TDMI-S微控制器;通过片内倍频和分频可达到最大为60MHz的CPU操作频率;具有32K片内静态RAM和256K的片上Flash程序存储器;支持系统编程(ISP)和应用编程(IAP),具有高速的flash编程速度和操作频率;支持实时调试和高速跟踪执行代码;具有2个32位定时器、PWM单元和看门狗;低功耗;具有多个串行接口,包括2个标准的UART接口,2个高速IIC接口和SPI接口;带有向量中断控制器,并且可配置优先级和向量地址等。
LPC2136主要运用于Simax系统的IO单元的CPU板上,其作用主要是完成对通道板的控制以及与分散处理单元(DPU)的通信。
Simax系统中的微处理器LPC2136采用11.0592MHz的外部晶振,通过片内倍频,CPU的操作频率为44MHz
以下对微处理器LPC2136在Simax系统的应用进行详细的分析。
3 数据采集
LPC2136通过SPI串行总线对IO进行配置、控制和采集数据,具体包括初始化IO单元上的AD转换器,选通IO通道,采集数据,在采集失败的时候返回错误类型等。
数据采集模块的流程图,如图1所示:
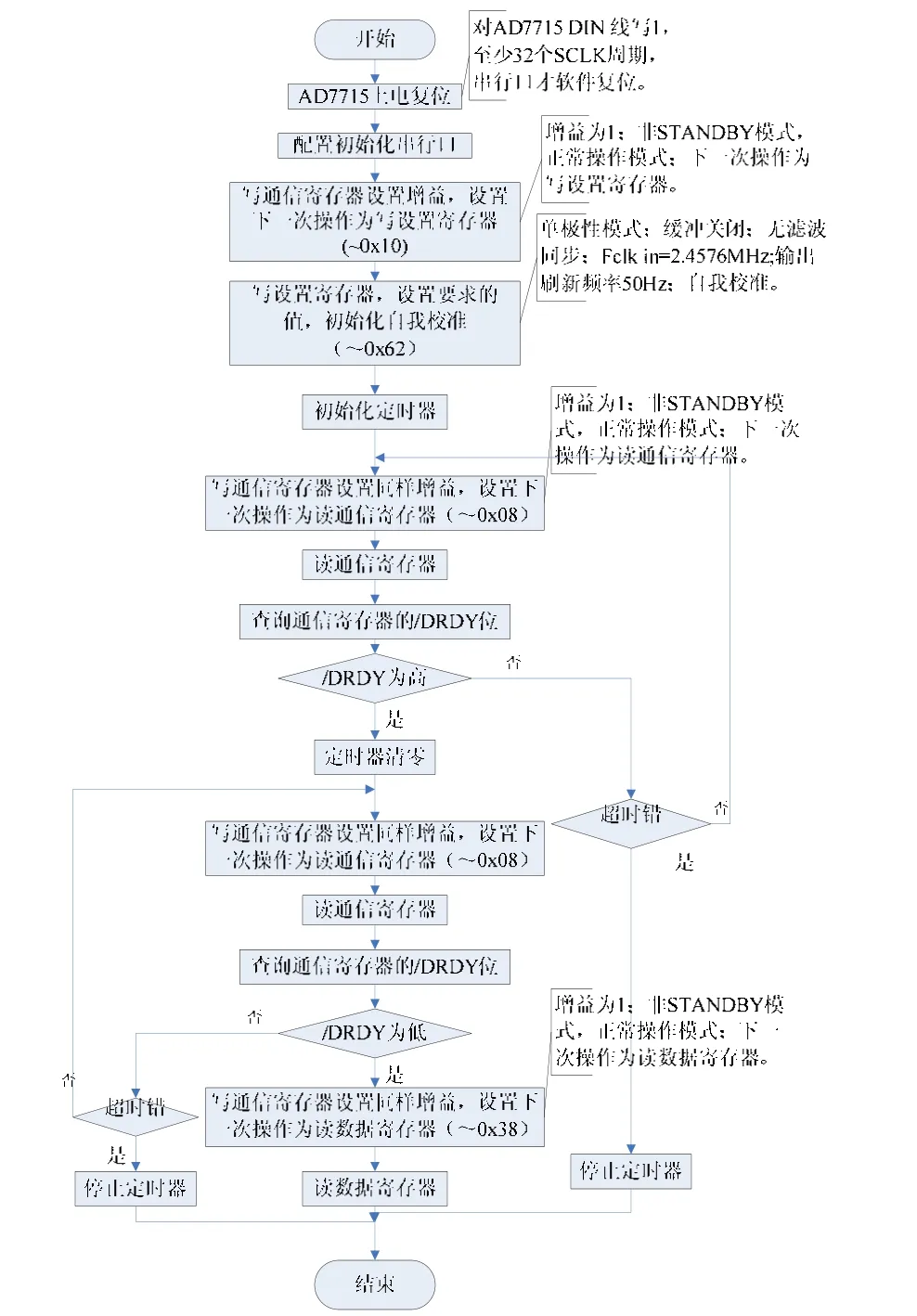
图1 数据采集流程图
数据采集流程:
(1)对系统进行初始化,配置时钟周期,中断,以及LPC2136的GPIO口状态等;
(2)初始化SPI,并初始化AD转换器,配置AD转换器的各种参数。
(3)AD转换器以固定周期采集数据并滤波。
(4)选通相应的通道(在Simax系统中,各种IO单元带有不同数量的通道),通过SPI总线周期性的将实时数据传送到LPC2136。
数据采集模块是整个程序的重点部分和核心部分,涉及到SPI总线通信、A/D转换、滤波、定时器、中断处理等,同时对时钟周期、实时性和数据精度要求比较高,LPC2136本身的功能特性很好的满足了这些操作的要求。
4 卡件标定
原始的IO单元由于各种原因,会存在实际采集到的数值和理论数值相比存在偏差,所以在使用之前需要对其进行校准和标定。
对卡件的标定是通过上位机标定程序进行的,上位机通过串口与LPC2136的UART口通信,预写初始的增益和偏移量,然后读取通道板采集到的数据,然后通过跟理论值对比和计算,获得相应的实际增益和偏移量,并通过串口发送给LPC2136,然后LPC2136通过I2C总线,将这个实际的增益和偏移量记录在IO单元件的E2ROM里面,这样在实际运行时,通道板采集到的数据经过矫正计算就能更准确的表达现场的各种信息。
LPC2136通过UART口与上位机标定程序通信进行标定的流程图,如图2所示:
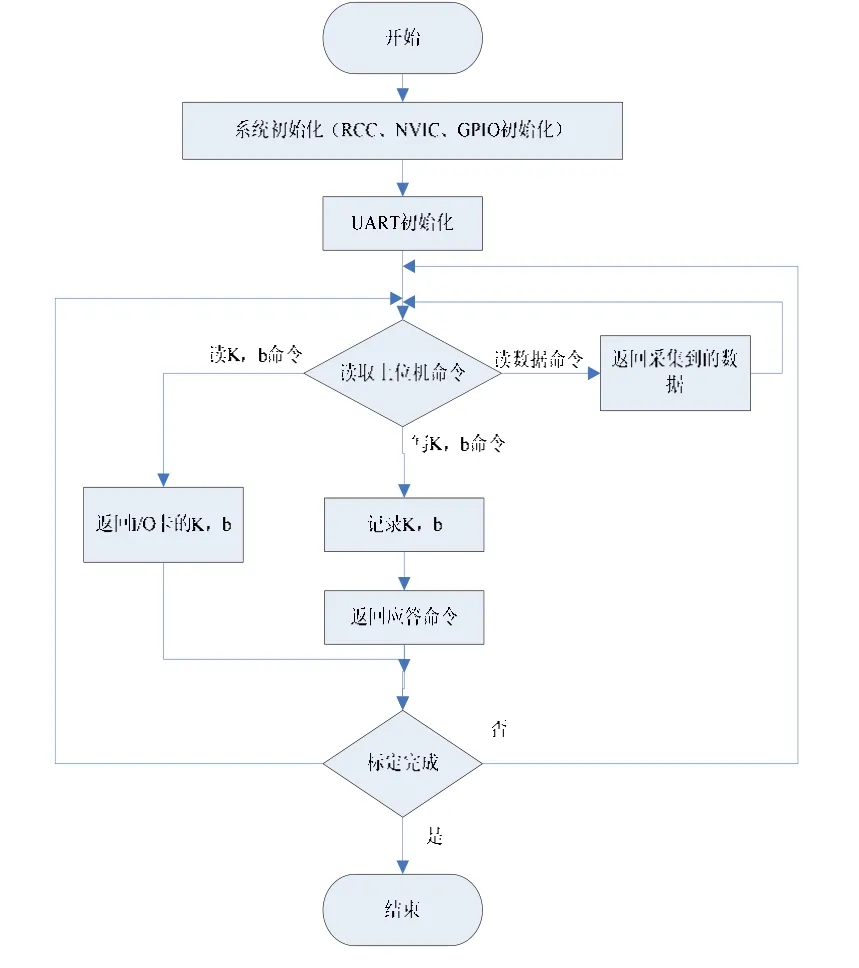
图2 LPC2136与标定程序通信流程图
LPC2136通过 I2C总线记录增益和偏移量的流程图如图3所示:
卡件标定流程:
(1)对系统进行初始化,配置时钟周期,中断,以及CPU的IO口状态等;
(2)初始化I2C,UART,配置I2C、UART的各个参数
(3)上位机首先会读取IO单元上铁电记录的增益K和偏移量b,如果为空,则写入初始值,增益为1,偏移量为0;
(4)上位机读取CPU采样数据,如果满足精度要求,则保持原有的K,b;若不满足要求,则写入初始K,b,并根据相应的IO单元件信息量程的95%和5%处的理论数据和采样得到的实际数据进行计算,计算出合适的K和b
(5)上位机通过串口将计算得出的K,b发送到CPU,CPU通过I2C总线将K,b记录到IO单元件上面的铁电相应的地址。
标定模块关系到采集到的数据的精度,关系到采集到的信息的可信度和信息的准确度。
5 并行总线通信
IO单元通过并行总线与分散处理单元(DPU)通信,并行总线传递分散处理单元(DPU)对IO单元下发的命令和组态,以及IO单元对分散处理单元(DPU)命令的响应和采集到的数据。
具体通信过程如下:DPU通过并行总线将命令下发到IO单元的FPGA,FPGA将命令发送到LPC2136的IO口,CPU通过IO口的状态并通过串转并得到相应的命令;CPU向DPU发送数据和响应是上述过程的反过程。
CPU并行总线通信的流程图,如图4所示:
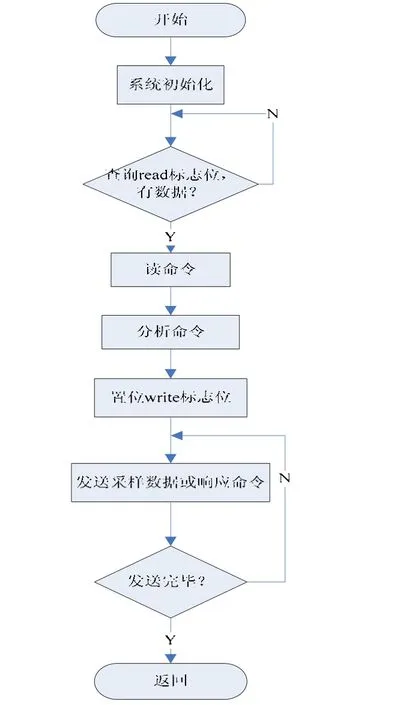
图4 CPU并行总线通信流程图
DPU和CPU通信包括各种控制命令和数据,具体有状态查询、组态、数据读写、出错处理等。具体过程是:上位机查询IO单元的工作状态,包括工作或备用、是否已组态等,IO单元的CPU向上位机返回IO单元的当前状态;上位机对IO单元进行组态,IO单元的CPU向上位机返回IO单元的当前组态;上位机读取IO单元采集到的数据或向IO单元输出信号,IO单元的CPU向上位机返回IO单元采集到的数据或者返回收到的信号。在IO单元与DPU通信过程中,如果IO单元出错,则向上位机返回相应的出错信息。
6 结论
ARM7的应用使DCS的实时性更好,准确度更高。由于ARM7集成了各种功能模块,使DCS的兼容性更好,同时ARM7的应用还降低了DCS的功耗和成本。
[1]王常力,罗安.分布式控制系统(DCS)设计与应用实列 [M]. 电子工业出版社 2010
[2]周立功. ARM 嵌入式系统基础教程 [M]. 北京航空航天大学出版社 2006
[3]周立功,张华. 深入浅出ARM7—LPC213X/214X [M].北京航天航空大学出版社 2006
[4]徐爱均. IAR EWARM嵌入式系统编程与实践 [M]. 北京航空航天大学出版社 2006
