晶片定位原理与算法
2012-08-08耿博耘李春龙周传月
吕 菲,耿博耘,李春龙,莫 宇,周传月
(中国电子科技集团公司第四十六研究所,天津 300220)
在半导体材料的加工过程中,为了提高生产效率,大部分设备都使用自动传片系统,自动化程度高的设备往往实现片盒到片盒的传输。这类设备的工作过程大致相似,即进片、定位、机械手传递、加工、机械手传递、出片。由此可见定位在加工过程中占据了非常重要的位置,只有能够实现精确定位,才能很好地完成加工过程,保证晶片的加工精度[1]。自动化设备应用较多的工序有倒角、激光打标、光刻等。
目前晶片定位技术主要有两种:电子定位、电子机械定位。在定位过程中,需要找到晶片的主参考面或者定位槽(对6英寸以上晶片)。对于有参考面的晶片,电子机械定位技术应用较多,机械定位配合电传感器,定位精度一般可以达到100 μm范围,这样的精度能够满足光刻工艺预对准要求[2]。如果要同时满足带定位槽和带参考面两种晶片的定位要求,则往往采用电子定位系统,这是本文讨论的重点。
1 晶片轮廓特点以及识别的主要数据
对于带定位槽的晶片(DOTCH),如图 1所示。沿位置8和位置4通过圆心连线,其长度记为L,将晶片直径记为准,定位槽的深度记为H,则H=准-L。我们可以用晶片的直径和槽的深度反映晶片的轮廓特点。
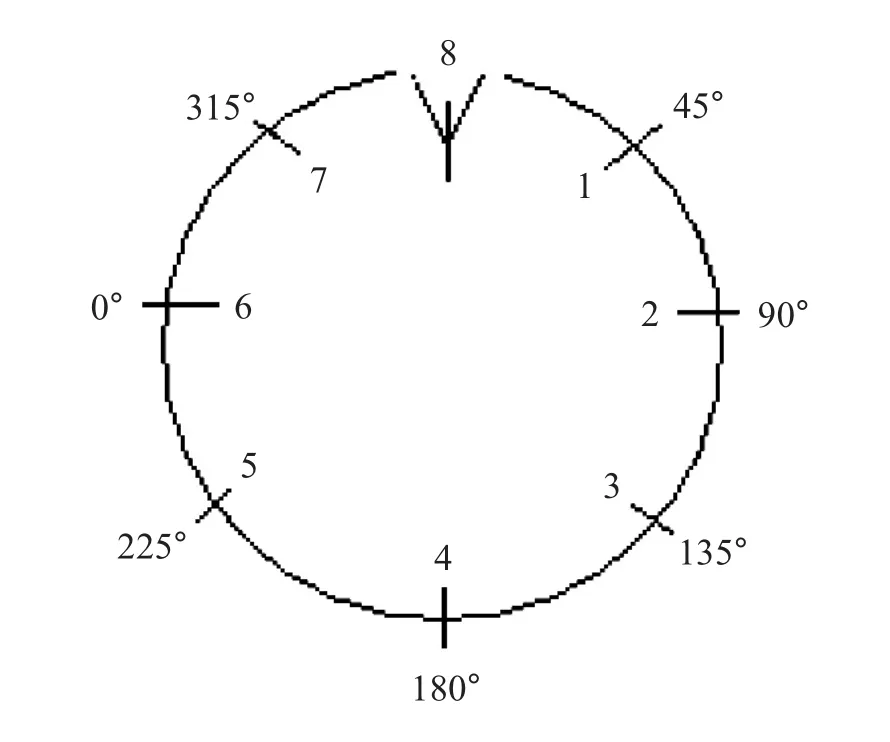
图1 有定位槽的晶片示意图
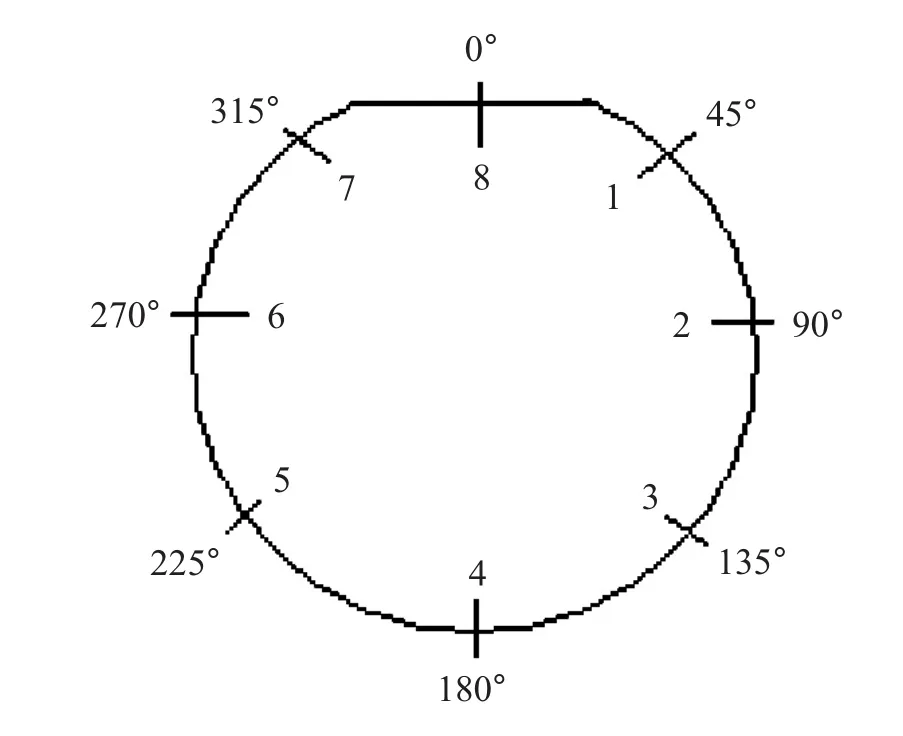
图2 只有主参考面的晶片示意图
对于只有一个参考面的晶片(OF),如图2所示,沿位置8和位置4通过圆心连线,其长度记为B,将晶片直径记为准,可以用B和准反映晶片的轮廓特点。对于有两个参考面的晶片,主参考面和次参考面之间有一定的夹角,可以用B和准以及夹角反映晶片的轮廓特点。
2 数据采集方法及数据特点
我们以单参考面晶片为例说明判断过程与原理。
2.1 数据采集方法
晶片的轮廓特点和特征值在上节已经说明。对晶片的定位就是要得到晶片的位置信息,这些信息需要由大量数据经过处理得到。经过机械手传片后,晶片进入设备坐标系中。如图3所示,其中B点是设备中固定位置,传感器的位置也是固定的,只要得到晶片圆心位置A的信息、参考面EF的信息,就完成了晶片的精确定位。通过机械手将定位后的晶片精确传送到加工工位,即可以进行晶片的精密加工[3-4]。
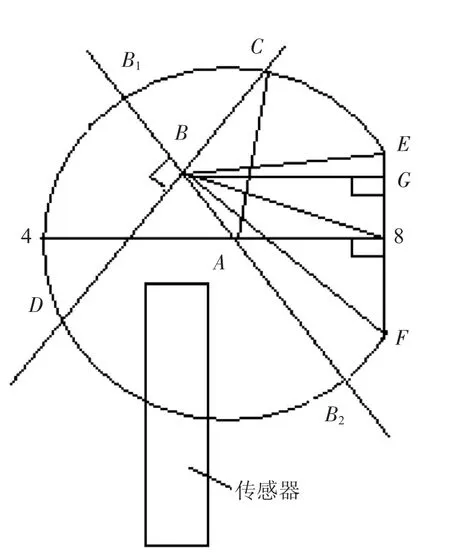
图3 晶片的数据采集系统
在图3所示的数据采集系统中,固定点B是承片台的中心,晶片由真空吸附在承片台上[5],承片台以一定角度旋转,同时由传感器读取晶片边缘的位置信息,完成数据采集。
2.2 数据特点
在晶片定位中,我们需要的是晶片圆心和参考面信息,如图3所示,通过A和B两点做一直线,与圆相交于B1和B2,除参考面外,图形沿AB直线对称,参考面上任意一点与B之间的连线都比线段B B2短。
3 数据分析及处理
数据采集是分步进行,以承片台旋转一定角度获取位置信息,信息量和数据处理精度取决于旋转角度大小。以旋转角为0.0036°,则完成360°采集数据量为100000。处理方法:
轮廓识别软件对数据处理后,得到最大值Lmax=BB2和最小值Lmin=BB1,同时记录得到最大值和最小值旋转角度,进而得到晶片圆心线和偏移值Δ=AB的信息。采集到的数据中,用得到最小(大)值时的旋转角度加或减90°,就得到晶片边缘位置对应的距离,记为:L1=BD=BC,晶片半径为R,,则:
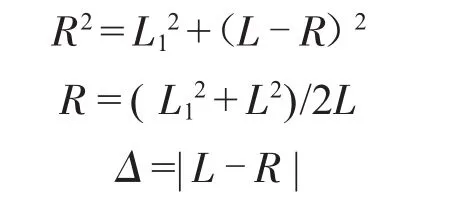
其中:L是Lmax=BB2或最小值Lmin=BB1
同样的数据处理,可以得到BE和BF的长度,及它们之间的夹角α=∠EBF。对三角形△EBF做垂线 BG,β1=∠EBG,β2=∠GBF,则 α=β1+β2,参考面长度 LEF=LBE×sin β1+LBF×sin β2,且 LBE×cos β1=LBF×cosβ2
通过计算可以得到 LEF,以及 β1和 β2,进而得到B值。至此得出晶片定位需要的所有信息:R、B、Δ、∠GBA[6,7]。
同样的处理方法可适用于次参考面。
4 定位系统组成
要完成上述数据采集与数据处理,需要如下部件:计算机系统、承片台步进电机、驱动器、位置传感器等。位置传感器的选择有多种方案,列出以下两种方案供参考:
1)位置传感器使用光电传感器,该传感器由步进电机驱动,在承片台转动一定角度后,步进驱动光电传感器,由传感器状态记录驱动传感器电机的数据,进而得到位置信息。
2)采用专用传感器以及驱动器:KEYENCE LS-7000 MICROMETER以及LS-7030传感器。
5 结 论
定位系统是设备的一部分,在实际使用过程中,选择的定位方法与设备要求的精度有关,还要考虑设备常量以及晶片进入设备坐标系的容差值。对于与数据处理相关的轮廓识别软件,在实际应用中要考虑其响应速度、数据处理速度、软件容错性等多种因素。
[1] 王学军.对硅片自动定位方法及软件控制原理的探讨[J].电子工业专用设备,2004,33(12):63-65.
[2] DECLERCKG.Material,processandapplication research formore moore and more than moore atIMEC[C]..ISTC/CSTIC 2009中国国际半导体技术研讨会.上海,中国,2009:32-41.
[3] SKUNANICHA,YAMARTINOJ,MUID,etal.Process optimizationandcontrolbasedontoo-lleveldata:advanced etch applications[J].SST,2004,47(6):104-112.
[4] GASSER B.The future of process control systems in high performance Si based nanotechnology[C]..AEC/APC Symp.Osaka,Japan,2003.
[5] MUI D,SASANO H,LIU W,et al.Integrated optical metrology controls pos-t etch CDs[J].Semiconductor International,2002,25(6):83-90.
[6] 徐品烈.高速粘片机晶片工作台的电机选型计算与运动控制[J].电子工业专用设备,2007,144(1):66-70.
[7] 张林.DMC运动控制卡在硅片倒角机中的应用[J].电子工业专用设备,2006,137(7):49-51.