针对执行器和关联链接失效的一类复杂系统自适应容错控制
2012-01-04金小峥李彦平
金小峥,李彦平
(沈阳大学 装备制造综合自动化重点实验室,辽宁 沈阳 110044)
针对执行器和关联链接失效的一类复杂系统自适应容错控制
金小峥,李彦平
(沈阳大学 装备制造综合自动化重点实验室,辽宁 沈阳 110044)
针对一类执行器和关联链接失效的复杂系统,提出了一个间接自适应方法解决容错控制问题.利用自适应律在线估计执行器和链接通道上的故障因子,并基于自适应策略的信息,构造一类通过其他子系统状态链接的分布式状态反馈控制器自动补偿故障影响.基于李亚普诺夫稳定性定理,所得到的自适应闭环复杂系统执行器和网络传输过程故障下可以保证渐进稳定.此方法的有效性最终由一个仿真例子验证.
复杂系统;容错控制;自适应方法;执行器故障;链接失效
随着科学技术和工程应用的发展,复杂系统的研究越来越受到重视.实际工程复杂系统由大量执行器在空间上分布,并且子系统通过关联链接连接组成,如机械系统的传动轴、齿轮、弹簧和传送带等.这些执行器和关联链接的安全性直接影响了整个系统运行的稳定性和基本性能,而在高强度长时间运行下系统元件容易发生故障,比如失效、中断、卡死、老化、断裂等.因此,复杂系统的稳定性研究有着重要的理论价值和实际意义.
设计控制器保证系统的稳定性是人们普遍采用的设计方法.针对复杂系统,主要有三种控制方式,即集中控制、分散控制和分布式控制.集中控制针对众多子系统只设计一个控制器,这种控制方法虽然能得到很好的控制效果和系统性能,但由于维数高,计算量庞大,较难实现.分散控制则针对每一个子系统分别设计控制器.这种控制方式减少了控制器的计算量,但由于控制器只应用了当前子系统的状态,并不能保证系统有较好的性能.分布式控制策略则吸取了集中控制和分散控制的优点,应用相邻系统的状态信息,针对每一个子系统设计控制器,从而减少了计算量并使得系统有较好的性能.因此,分布式控制系统得到了日益广泛的重视和研究,如今已经提出许多分布式控制器的设计方法[1-3],但这些研究都是在假定系统执行器和关联链接正常工作的情况下进行的,而实际系统中,执行器和链接失效不可避免.
本文设计了线性时不变复杂系统的分布式容错控制器,以保证在执行器和链接失效的情况下系统仍能保持稳定.利用自适应方法,在线估计执行器和链接失效因子,并应用估计值构造分布式控制器,以补偿链接故障.基于李亚普诺夫稳定性定理,可以证明所提出的控制器能保证复杂系统在执行器和链接故障下的稳定性.
1 问题描述
类似文献[1],有N个子系统的线性时不变系统连续时间复杂系统描述为:


在正常情况下,每个子系统的输入和输出可以定义为

假设每个系统的状态在每个时刻都是可测的,则可以给出一个与系统有相同结构的状态反馈控制器:

与文献[4]相同,假设子系统仅仅与它们的状态相关联,则:

本文考虑执行器和关联链接出现失效故障,其故障模型描述如下:

由此,等式(2)可以描述为

则复杂系统(1)可以写成如下形式:

由此,本文的主要目标为构造分布式控制器u i(t)使得闭环系统(12)在链接故障下渐进稳定.
2 主要结果
在给出本文的主要结果前,假设如下矩阵的分解形式:



则得到如下定理,保证闭环系统(12)和误差系统(20)一致有界.

证明 针对闭环复杂系统描述如(12),首先选择李亚普诺夫方程如下:




3 仿真例子
本节给出如下数值例子说明所设计的分布式控制策略的有效性.系统矩阵如下:


在仿真中,考虑如下故障情形:系统在0.5 s前在正常模式下运行,当t=0.5s,发生一些故障描述如下:

图1和图2分别表示第一个系统和第二个系统的状态.图3和图4则描述了失效因子ρi,σji的自适应估计曲线.从图中可以看出,本文提出的自适应分布式控制器能使系统在执行器和链接故障下渐近稳定.

图1 第一个子系统的状态曲线Fig.1 State curve of the first subsystem

图2 第二个子系统的状态曲线Fig.2 State curve of the second subsystem

图3 执行器失效因子的估计曲线Fig.3 Estimated curve of actuator failure factor
4 结 论
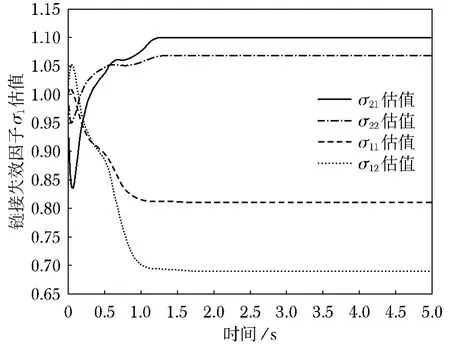
图4 链接失效因子的估计曲线Fig.4 Estimated curve of Link failure factor
本文讨论了复杂系统的分布式自适应容错控制问题.利用自适应方法在线估计执行器和关联链接的失效因子,补偿故障带来的影响.并基于估计值,构造分布式状态反馈控制器,使系统在执行器和关联链接失效时仍能满足渐近稳定.数值例子进一步的验证了所提自适应方法的有效性.
[1] Bamieh B,Paganini F,Dahleh M A.Distributed control of spatially invariant systems[J].IEEE Transactions on Automatic Control,2002,47(7):1091-1107.
[2] D’Andrea R,Dullerud G E.Distributed control design for spatially interconnected systems[J].IEEE Transactions on Automatic Control,2003,48(9):1478-1495.
[3] Langbort C,Chandra R S,D’Andrea R.Distributed control design for systems interconnected over an arbitrary graph[J].IEEE Transactions on Automatic Control,2004,49(9):1502-1519.
[4] Jin X Z,Yang G H.Distributed adaptive fault-tolerant control against actuator faults and lossy interconnection links[J].Control Theory & Applications(控制理论与应用英文版),2009,7(4):105-112.
[5] Ioannou P A,Sun J.,Robust Adaptive Control[M].Englewood Cliffs,NJ:Prentice-Hall,1996.
Adaptive Fault-tolerant Control for a Class of Complex Systems with Actuators and Interconnections Faults
JINXiaozheng,LIYanping
(Key Laboratory of Manufacturing Industrial Integrated Automation,Shenyang University,Shenyang 110044,China)
An indirect adaptive method is presented to solve the fault tolerant control problem against actuator and interconnection faults for a class of complex systems.The adaptation laws are proposed to estimate unknown eventual faults on actuators and interconnection channels on-line.Then a class of distributed state feedback controllers is constructed for automatically compensating the fault effects on systems based on the information from adaptive scheme.On the basis of Lyapunov stability theory,it shows that the resulting adaptive closed-loop complex system can be guaranteed the asymptotic stability even in the cases of faults on actuators and interconnections.The proposed design technique is finally evaluated in the light of a simulation example.
complex systems; fault-tolerant control; adaptive method; actuator faults;interconnection faults
TP 13
A
1008-9225(2012)02-0052-05
2011-12-09
国家自然科学基金资助项目(61104029).
金小峥(1982-),男,浙江金华人,沈阳大学讲师,博士;李彦平(1958-),男,辽宁沈阳人,沈阳大学教授,博士.
李 艳】
