浅谈自动控制系统校正实验的Simulink仿真研究
2010-10-10周浩淼
马 壮,周浩淼
(唐山学院信息工程系,河北唐山 063000)
浅谈自动控制系统校正实验的Simulink仿真研究
马 壮,周浩淼
(唐山学院信息工程系,河北唐山 063000)
针对自动控制原理中系统校正方法进行简要介绍,并以串联校正为例,对校正装置的设计与实验实现提出了具体的处理方法,对响应进行数据采集并与Simulink仿真结果比较得出结论。
自动控制;被控对象;系统校正
0 引言
自动控制系统的校正是《自动控制原理》最重要的章节之一,掌握校正装置的设计与实验实现可以提高学生的综合分析与设计能力,使学生全面了解系统校正的目的和意义。
本文以清华科教仪器厂的XMN2Ⅱ型自控原理学习机和辅助实验教学软件CAE2PCI3.0数据采集为例,简要介绍校正装置设计的基本原理,并对实验实现提出了具体实验方案和给出真实实验结果,并与Simulink仿真结果进行比较,得出结论。
1 系统校正的基本原理
通常自动控制系统可分为被控对象、控制器、监测环节[1]。被控对象WO(S)是由系统所应完成的具体任务决定的;控制器是人为设计的,用来满足系统控制指标的要求;监测环节是用来检测输入输出量的变化,是系统形成闭环的必要条件。一般情况下,原有系统不能满足实际要求的各项性能指标,为改善系统的动、静态性能而引入附加装置,此附加装置称为校正装置即控制器WC(S)。校正装置的选择及其参数整定的过程,称为系统的校正。
系统校正的方法很多,有串联、并联、反馈、前馈等等,本文以经典串联校正为例,其校正的基本原理如图1所示[2],其中 X(s)为系统输入;Y(s)为系统输出。

图1 系统校正的基本原理

其中,S-传递函数的算子;K-系统增益。其模拟电路如图2所示。

图2 被控对象模拟电路
2 校正前系统分析
经分析,原有系统的动态结构图(数学模型)如图 3所示。

图3 被控对象的数学模型
图3中 T=RC为系统的时间常数;K为局部反馈增益。
原有系统(R=1 MΩ,C=1.0μF,K=0.4)加入单位阶跃信号,系统的阶跃响应曲线如图4所示。未校正系统的超调量σ%=50%,上升时间tr=2.4 s,调节时间ts=16 s。

图4 系统校正前阶跃响应曲线
3 系统的校正
实验要求加入超前校正装置使系统相位裕量不小于500°,增益裕量不小于10 dB,同时保持静态速度误差系数不变。
3.1 校正装置的确定
若原有系统不符合性能指标要求,需采用串联引前校正装置。其传递函数为

式中α=R1/(R1+R2),KC为校正装置的增益。引前校正装置对应的模拟电路如图5所示。

图5 引前校正装置的模拟电路
3.2 校正后系统的特性分析
系统校正后的模拟电路如图6所示。将校正环节串联到运算放大器OP1后面,也就是结构图里面的前向通道上的WC(S)的位置上。
经过计算可知,KC=1.05,校正后系统阶跃响应曲线如图7所示,其性能指标为:σ%=35%,tr=1.5 s,ts=8.5 s。模拟电路校正前后比较:系统性能指标有所改善,但实验结果与要求的性能指标有一定的差距,这是因其模拟电路存在一定的系统误差所致。
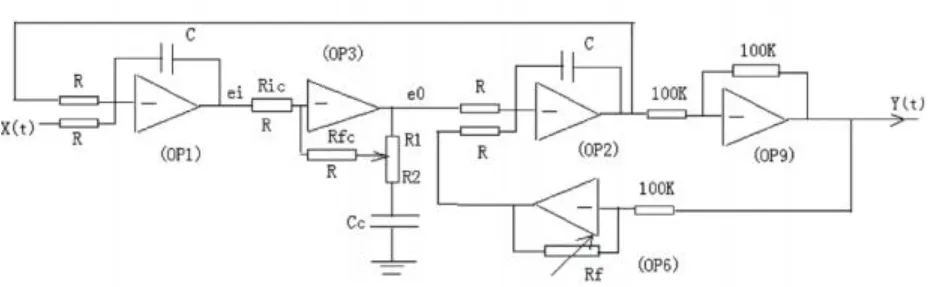
图6 校正后的模拟电路

图7 系统校正后阶跃响应曲线
4 Simulink仿真
4.1 利用Simulink建立仿真文件
MA TLAB是矩阵实验室(Matrix Laborato ry)的简称,是美国Math Works公司开发的商业数学软件,主要用于算法开发、数据可视化、数据分析以及数值计算的高级技术计算语言和交互式环境中。而Simulink是MA TLAB最重要的组件之一,它提供了一个动态系统建模、仿真和综合分析的集成环境[3]。
打开MA TLAB软件,在Command窗口输入Simulink,即可进入仿真环境[4]。在Continuous,Sinks,Sources,Math Operations和Signal Routing模块中找到相关的原件,将其拖动到新建文件中,连接好输入和输出,此程序如图8所示。

图8 Simulink仿真程序图
4.2 系统校正前后响应的仿真结果
在Simulink环境电位器阻值不变的情况下,改变 R1和R2的值可以得到不同性能的响应曲线,从中可选取较好的情形作为选择校正装置的依据。
当 R1=R2=50 kΩ时,σ%=40%,tr=1.3 s,ts=7.5 s;当 R1=20 kΩ,R2=80 kΩ时,σ%=47%,tr=1.7 s,ts=12.5 s;当R1=90 kΩ,R2=10 kΩ时,σ%=27%,tr=1.6 s,ts=6.3 s。图9为校正前系统的 Simulink仿真曲线。若 R1+R2增加为200 kΩ,且α=0.1时,其仿真结果如图10所示,系统的性能指标为σ%=15%,tr=1.5 s,ts=4.2 s。

图9 系统校正前仿真结果

图10 系统校正仿真结果
4.3 校正方法分析
校正前:系统仿真结果与模拟电路实际结果基本一致;校正后:通过模拟电路得到的结果系统性能虽得到改善,但与系统要求有一定差距;而通过Simulink仿真,当参数变化为R1+R2=200 kΩ,α=0.1时,参数性能指标完全符合系统的要求,所以可以通过Simulink仿真来改善模拟电路调节装置的参数,在完成控制要求的前提下可达到良好的控制效果。
5 结束语
本文采用模拟电路实验和Simulink仿真两种方法对二阶系统进行了串联校正实验,结果表明Simulink仿真较模拟电路实验更简单、灵活、易行,与实际模拟电路的实验结果能够达到同样的控制效果。
[1] 龙驹,张广溢.MA TLAB语言在自动控制系统校正装置设计中的应用[J].四川工业学报,2003,22(1):19 -21.
[2] 周昱英.基于Matlab/Simulink控制系统校正器的设计与仿真[J].南京工业职业技术学院学报,2003,3(3): 17-20.
[3] 张红莲.基于MA TLAB的控制系统校正环节的优化设计[J].自动化与仪器仪表,2000(2):22-23.
[4] 张平.MA TLAB基础与应用简明教程[M].北京:北京航空航天大学出版社,2001.
(责任编校:李秀荣)
Discussed shallowly Simulink Research of the Compensation Experimen t for Automatic Con trol System
MA Zhuang,ZHOU Hao-miao
(Department of Info rmation Engineering Tangshan college,Tangshan 063000,China)
This paper introduces the compensation methods of a control system in Automatiac Control Theroy,gives a design and experiment method for composition with the example serial-compensation,and draw s the conclusion by collecting data and comparing them with the results of simulation by Simulink.
automatic control;controlled object;system compensation
TP273;TP217
A
1672-349X(2010)06-0041-03
2010-09-30
马壮(1977-),男,讲师,主要从事自动控制系统与自动化技术的理论和应用研究。
