舵桨联合操纵微小型潜器运动建模与仿真*
2010-04-12苏玉民郭冰洁
王 波 苏玉民 郭冰洁 梁 霄
(哈尔滨工程大学船舶工程学院 哈尔滨 150001)
0 引 言
随着海洋研究与开发的不断进展,自主式水下潜器(AUV)在民用领域、军事领域和科学研究等方面的应用日益引起广泛的重视.微小型水下潜器因其具有体积小,隐蔽性好,造价低,能耗小,机动灵活,可批量生产,搭载灵活等优势,从而成为AUV发展的一个重要方向[1].本文研究的对象就是某型舵桨联合操纵的微小型水下潜器.AUV空间运动具有耦合性和非线性,建立适合AUV运动数学模型是研究AUV操纵性能和进行控制系统设计的基础.同时,采用理论或试验方法对数学模型中需要的各项力进行分析求解对AUV进行运动仿真模拟对预报AUV的操纵性能,选取控制参数和检验控制效果有重要意义.
基于动量定理和动量矩定理推导了AUV的动力学方程,并结合运动学方程得到AUV空间运动的六自由度数学模型,并采用了模块化的矩阵表达方式,使模型更加简洁明了.针对研究对象,采用试验和理论计算方法获取微小型潜器的流体动力参数,采用S面控制方法[2]对速度控制、艏向控制和深度控制进行仿真模拟,对研究微小型潜器的操纵性能和运动控制提供有意义的参考.
1 微小型潜器运动的非线性数学模型
1.1 坐标系选取及运动参数定义
本文所研究的微小型潜器总长1.5m,重量37kg,单桨推进,采用锂电池作为能源,尾部为一对水平舵和一对垂直舵,4个舵完全相同,设计巡航速度约2kn.
根据国际水池会议(ITTC)推荐的和造船与轮机工程学会(SNAME)术语公报的体系,建立如下2种坐标系:固定坐标系E-ξηζ(又称惯性坐标系)和运动坐标系o-xyz(又称随体坐标系).如图1所示[3]:
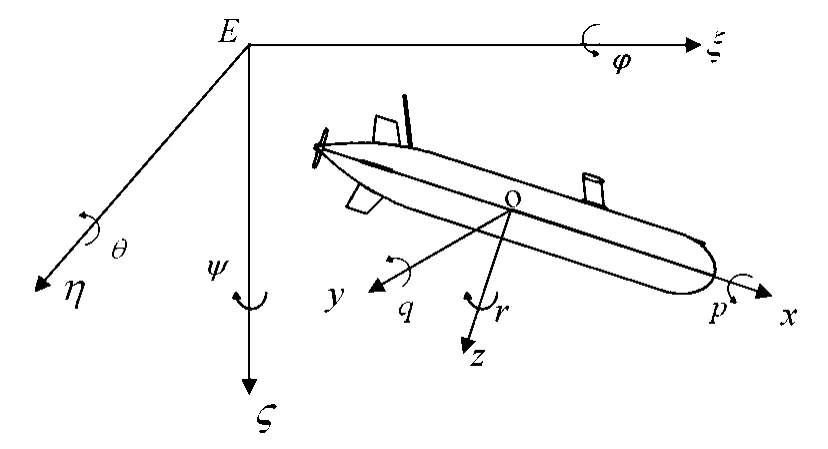
图1 坐标系示意图
记广义方位参数为R,广义速度参数为V,广义力参数为G,则微小型潜水器的运动参数包括:
1)位置和姿态(惯性坐标系下) R=[rT,ΛT]T,r=[ξ,η,ζ]T,Λ=[φθψ]T.
2)速度和角速度(运动坐标系下) V=[UT,ΩT]T,U=[u,v,w]T,Ω=[p,q,r]T.
3)力和力矩参数(运动坐标系下):G=[FT,MT]T,F=[X,Y,Z]T,M=[K,M,N]T.
1.2 运动学方程
AUV在惯性坐标系下的空间位置和姿态与其在运动坐标系下的速度和角速度和速度的动态关系可以由运动学方程来描述
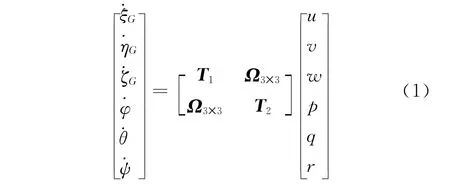
式中:T1,T2为3×3的坐标转换矩阵.

1.3 动力学方程
根据动量定理和动量矩定理,可得到潜器的平移动力学方程和旋转动力学方程[4],分别为
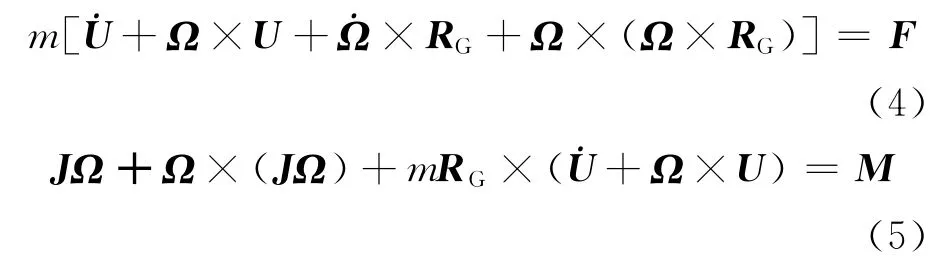
式中:RG=(xG,yG,zG)为潜水器重心在运动坐标系下的位置向量;J为潜水器在运动坐标系中的惯量矩阵.J的矩阵形式为
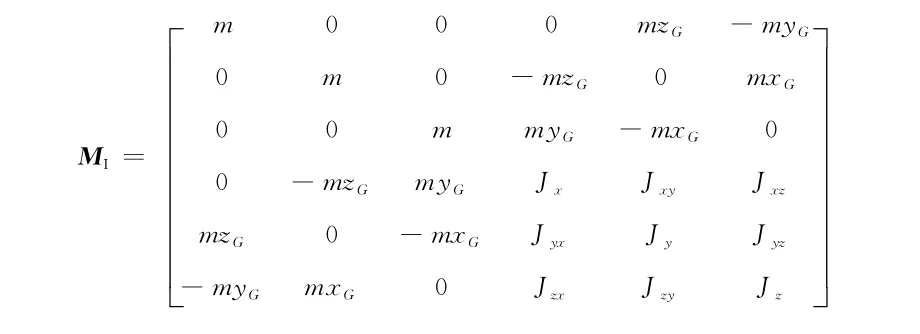
将式(4)、(5)合并后写为如下形式

式中:MI为广义质量矩阵;C(V)为潜器自身的科氏力和向心力矩阵.MI和C(V)的矩阵表达式为

动力学方程右端的广义力G是指潜器所受的外力,包括静力(重力和浮力),艇体流体动力(包括附加质量部分和粘性水动力部分),可控的流体动力(包括舵作用力和螺旋桨作用力).
潜器所受的静力Gp表示为
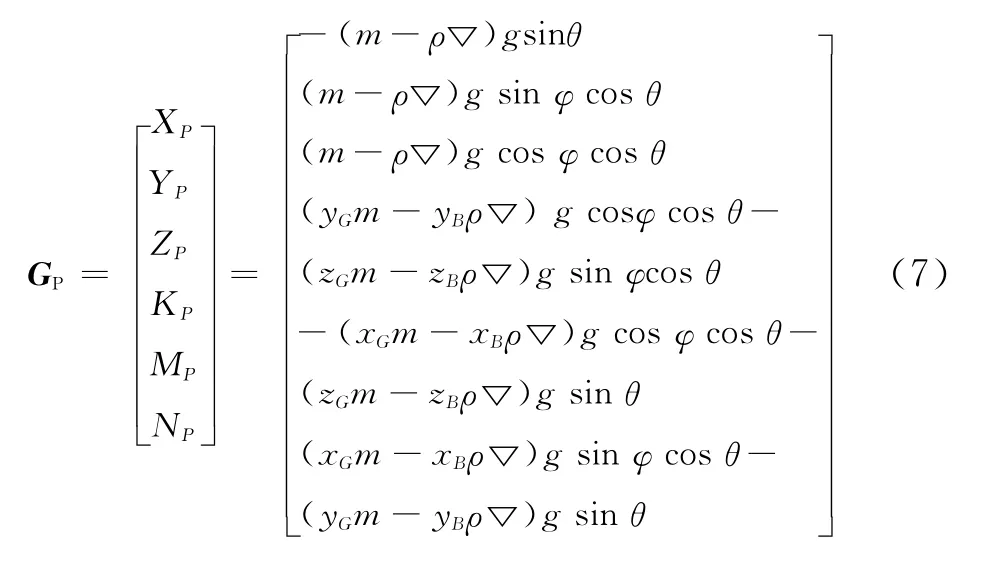
式中:(xB,yB,zB)为潜器浮心坐标位置;m 为潜器质量;▽为潜器的排水体积;ρ为流体密度.
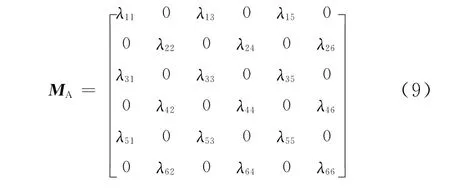
将与附加质量相关的惯性类水动力记为GA,表达为如下形式

式中:MA为广义的附加质量矩阵.
由于潜器一般关于XOZ面对称,所以附加质量矩阵可简化为如下形式
根据所研究潜器的外形特征,将艇体的粘性类水动力记为GV,写成以下形式
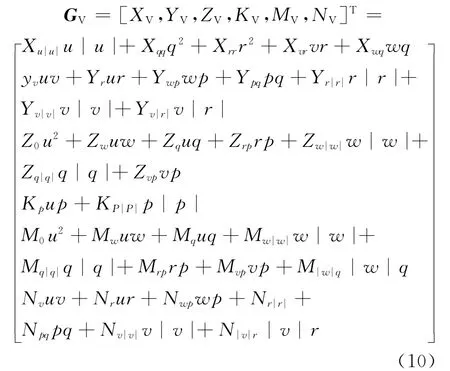
式中:Xu|u|、Yr、Yr|r|、Mw|w|等都是一阶或二阶的水动力系数.
对于舵产生的流体动力,在舵角未达到升力的失速角的情况下,将舵的流体动力记为GR,则
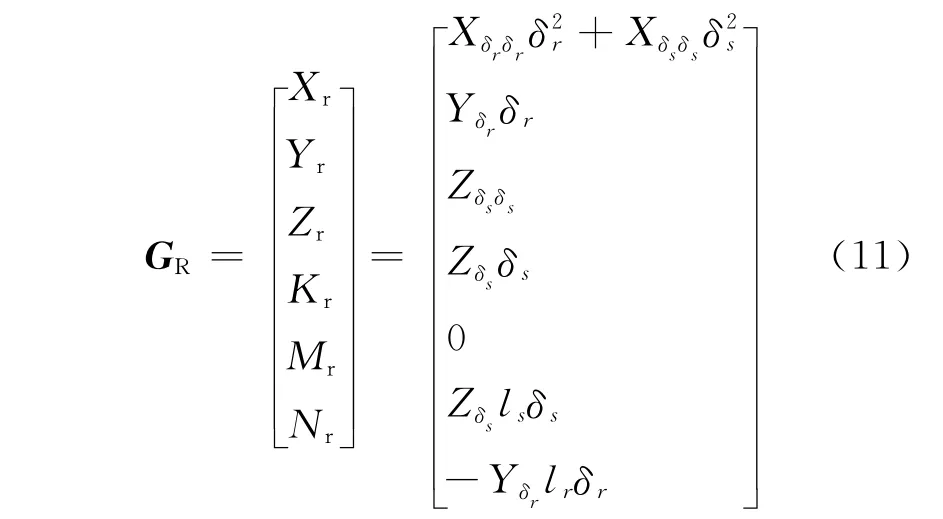
式中:δr为垂直舵舵角;δs为水平舵舵角;Xδδr,Xδsδs,Yδr和Zδs为舵角的力和力矩系数;ls和lr分别为水平舵和垂直舵对应于运动坐标系原点的力臂的大小.
将螺旋桨产生的流体动力表示为Gs,对于单桨推进,则

式中:n为螺旋桨转速;D为螺旋桨直径;kt为推力系数;kq为转矩系数.
基于以上的分析,可将动力学方程式(6)表达为更详细的式(13),此方程也适用于一般的水下航行器.

对于动力学方程中各项力的求取,本文通过3维面元法计算微小型潜水器艇体的附加质量[5](艇体表面网格划分2 057个,如图2所示);粘性类水动力通过在循环水槽利用平面运动机构进行的模型试验以及推算获取;舵和螺旋桨的流体动力也由试验得到.
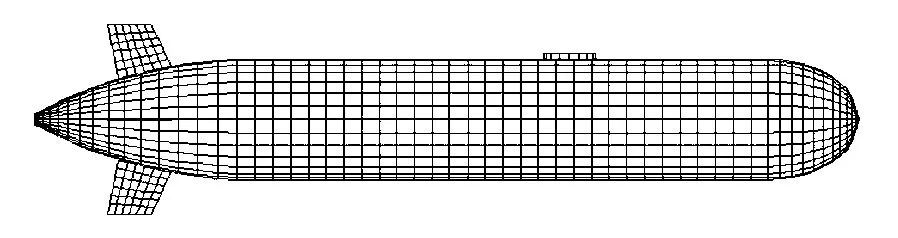
图2 潜水器表面网格划分
2 控制方法及推力分配
2.1 控制方法[6-7]
本文选取S面控制方法控制潜水器的运动来进行仿真模拟,S面控制是将模糊控制的思想与PID控制的结构相结合,既简化了控制器的设计又保证了控制效果,并且在湖试和海试中得到了验证.S面控制的控制模型为

式中:ei和为第i自由度控制的输入信息(偏差和偏差变化率,通过归一化处理);ui为第i自由度的控制输出;ki1和ki2分别为对应第i自由度偏差和偏差变化率的控制参数;fi为该自由度上所需力的大小;Ki为该自由度上执行机构所能提供的最大力或力矩.对于潜器水下受到的一些未知扰动,可以考虑成一段时间内的固定干扰力,这样就可以通过调整S面的偏移来达到消除固定偏差的目的,Δui即为通过自适应方式得到的固定干扰力的大小(归一化).
另外,由于所研究的微小型潜器只有一个桨和两对舵,执行机构较少,因此运动是欠自由度的,不能实现水平横移、垂直横移和横滚运动,潜器的横滚由其自身的恢复力矩恢复稳定.因此后续运动仿真给出定速、定向、定深3种运动的控制结果.
需要特别说明的是:由于此微小型潜器垂向未布置推进器,深度控制通过一对水平舵来实现,所以本文将深度控制通过一定运算转化为纵倾控制,依靠控制潜器纵倾的方法来实现定深航行.
将深度变化Δz表达为纵倾角θ和潜器纵向速度u的函数

取反可得到潜器的目标纵倾角θd

2.2 推力分配
微小型潜器执行机构少,推力分配较简单,只需分配x轴方向的推力Tx和绕y轴的力矩My和绕z轴的力矩Mz,关系如下
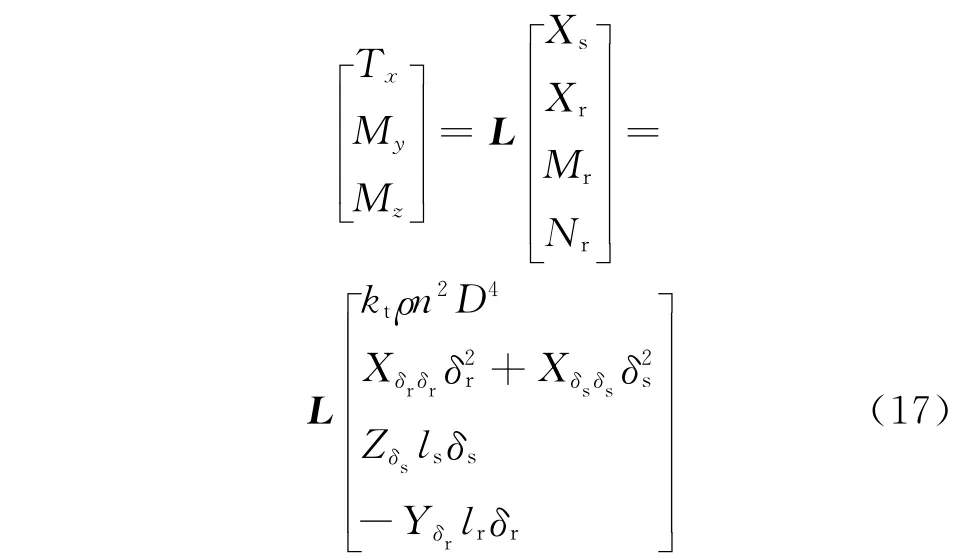
式中:L为推力配置的常量矩阵,写为
其他符号定义可参考式(11)和式(12).
3 运动仿真及分析
基于以上潜器的数学模型和控制策略,用VC在计算机上建立了仿真平台,同时结合潜器的设计航速,给出微小型潜器从初始状态(初始速度、角速度、初始位置和姿态都为0)到纵向速度u稳定在1m/s的定速控制仿真曲线,在速度u=1m/s时进行艏向控制,使艏向偏转30°,45°和90°的仿真曲线和进行深度控制时定深3m的仿真曲线,同时给出了水池试验的一些数据进行对比,验证仿真模型的正确性[8].
图3给出速度控制曲线.从图中可以看出,微小型潜器速度在17s左右趋于稳定,达到1m/s,控制上升时间较短,基本没有超调和稳态误差.
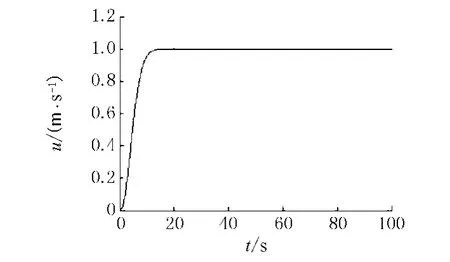
图3 定速控制的速度变化曲线
图4给出微小型潜器艏向控制的仿真曲线,从图中可以看出,在3个偏转角度下,微小型潜器都能较快的进入稳定,基本无超调,显示了潜器良好的水平面回转性能,同时艏向角改变越大,相应的摇艏角速度的变化也越大.图5给出了水池试验中艏向控制曲线,试验时初始艏向角约-130°,目标艏向为-110°,从图中也可以看出,实际艏向控制效果是令人满意的.另外由于水池宽度所限,无法实现与仿真试验中3个偏转角度下的曲线对比,但是从图5的曲线也可以看出控制方法的可行性以及仿真的可信性.
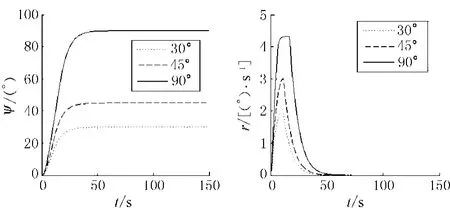
图4 定向控制艏向角和摇艏角速度变化曲线
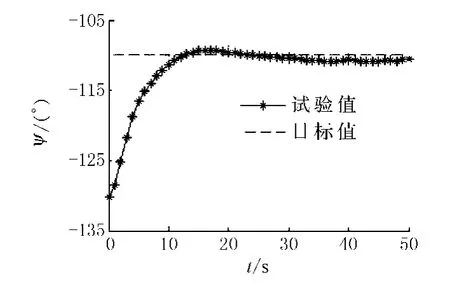
图5 水池试验的艏向控制曲线
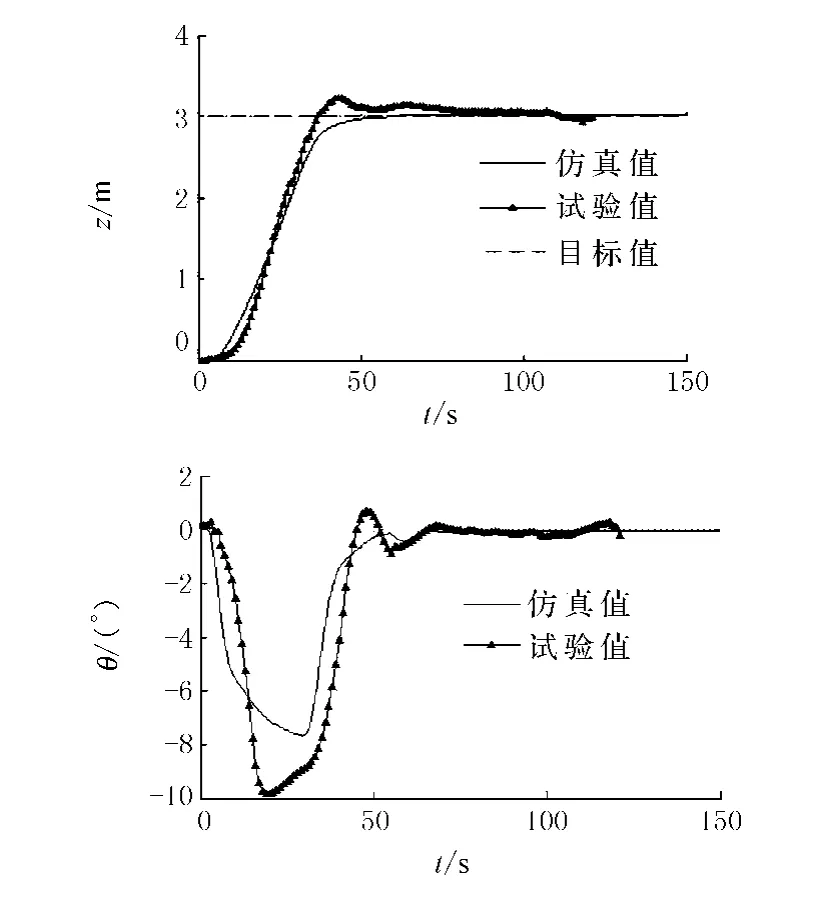
图6 深控制深度和纵倾角变化曲线
图6给出了采用纵倾控制调节深度时的深度随时间的变化曲线和相应的纵倾角变化曲线,同时给出了仿真结果与试验值的对比.从图中可以看出潜器在纵倾控制下深度变化连续平稳,稳态误差较小,在深度偏差较大时,纵倾角 逐渐增大到最大值,随着偏差减小,也随之减小,最终稳定在0°左右.从试验结果与仿真的对比来看,两者之间存在一定的偏差,试验值深度控制有一定的超调,纵倾角相对于仿真值来说偏大,最大相差约2°,这是因为试验时微小型潜器尾部带有一根光缆,对潜器的下潜会产生一定的影响,另外还有舵翼实际安装位置的偏差产生的影响,重心位置偏差引起的回复力矩与仿真时的不同所产生的影响等.但总的来说,结果还是比较令人满意的,试验值和仿真结果吻合的还是较好的,最终的深度能够稳定在目标值附近,这说明所建立的运动模型和仿真结果是真实可信的.也证明了本文采用的依靠调节纵倾来控制深度的方法是可行的.
4 结 束 语
本文建立了微小型潜器空间运动的非线性数学模型,分析了动力学方程中各项力并分别表达为矩阵形式.在此基础上,采用S面控制方法对潜器的定速、定向和定深控制进行了数值仿真.仿真结果较为真实的反映了在舵桨联合操纵下潜器的运动特性和操纵性能,与试验结果的对比也验证了仿真的合理性和正确性.同时本文建立的动力学模型也适用于一般的水下航行器.另外由于微小型潜器体积较小,对外界干扰抵抗力低,所以今后需要进一步研究复杂海洋环境对它的影响,从而更好的模拟潜器在海洋环境中实际运动.
[1]苏玉民,万 磊,李 晔,等.舵桨联合操纵水下机器人的开发[J].机器人,2007,29(2):151-154.
[2]刘学敏,徐玉如.水下机器人运动的S面控制方法[J].海洋工程,2001,19(3):91-84.
[3]Li Ye,Liu Jiancheng,Shen Mingxue.Dynamics model of underwater robot motion control in 6degrees of freedom [J].Journal of Harbin Institute of Technology,2005,12(4):456-459.
[4]李殿璞.船舶运动与建模[M].哈尔滨:哈尔滨工程大学出版社,1999.
[5]戴遗山.舰船在波浪中运动的频域与时域势流理论[M].北京:国防工业出版社,1998.
[6]孔祥军,邹早建,牟军敏.一种操纵性水动力导数的实用估算方法[J].武汉理工大学学报:交通科学与工程版,2004,28(1):30-32.
[7]Song Feijun,An P E,Folleco A.Modeling and simulation of autonomous underwater vehicles:design and implementation[J].IEEE Journal of Oceanic Engineering,2003,28(2):283-296.
[8]杜晓旭,潘 光.远程AUV微速操纵性仿真研究[J].系统仿真学报,2007,19(3):470-473.
