无轴传动同步控制系统中SERCOS总线接口设计
2009-01-20王艳平
摘要:本文结合SERCOS接口的特点和无轴传动系统结构,设计了串行无轴传动控制器SERCOS接口卡的硬件系统和软件流程。实践表明,该方案能够完成对大量轴的高精度同步运动控制。
关键词:无轴传动;同步控制;SERCOS总线
1引言
无轴传动技术是一门新兴的、跨学科的综合性技术,它以相互独立的伺服电机驱动系统代替传统的机械长轴传动,并通过网络、程序软件等形成内部虚拟电子轴,各电子轴通过现场总线连接,进行数据的可靠交换和高速通讯,各个伺服电机跟随电子主轴运转,以保证各伺服电机的相位严格同步[1]。由于无轴传动克服了机械长轴传动中的传动构件过多造成的累积误差、过度磨擦,以及设备机械结构复杂、体积庞大、维修困难,安装调试不方便等机械传动技术难题,目前在机器人、印刷机、大型同步轧机、数控机床等要求实现多轴同步传动的领域,无轴传动技术得到了广泛的应用[2]。
在无轴传动系统中,关键装备是无轴传动控制器(Shaftless Drives Controller),它主要完成对多轴的运动控制,并为生产过程控制提供硬件平台。无轴传动控制器控制多轴运行可以采用串行控制方式和并行控制方式。本文针对大量轴控制采用串行控制方式,并就串行总线SERCOS接口卡的软硬件进行了设计。
2SERCOS总线接口特点
SERCOS(Serial Real-time Communication System)由德国工业界于20世纪80年代中期提出,它是一种用于数字伺服和控制器之间的高速串行通信的现场总线接口和数字交换协议,专门针对自动化系统中的多轴运动控制系统而设计,是目前唯一的有关运动控制的国际通讯标准[3][4],我国于2002年也正式颁布了SERCOS协议的国家标准。其接口主要特点为:
(1)控制环模式:在SERCOS接口中,位置环在数字驱动器内闭合,控制器中的闭环数减少到零。控制器不需要位置反馈,控制器与数字智能驱动器之间通过SERCOS传递位置参数等,减少了控制器的运算周期,增加可控轴的数量。
(2)传输介质:SERCOS总线用塑料光缆或玻璃光缆构成一个环型回路,可以有效地排除电磁干扰。
(3)通讯结构:SERCOS采用主从站通讯结构,主站控制该环上的所有通讯,环内交换的信息完全取决于控制器和驱动器间的任务分配,控制器是主控者,驱动器只对控制器的请求作出响应,信息的交换仅仅发生在控制器和驱动器间。从站即负责驱动器和控制器的信息交换,又作为中继器传递数据,解决了高速串行通信环的分段问题,使SERCOS接口可以支持离散设备。
3 SERCOS接口卡硬件设计
3.1 接口卡硬件总体设计
接口卡的总体设计框图如图1所示。
该接口卡的SERCOS总线控制器选用SERCON816。SERCON816资源丰富,功能强大,内有43个16位的控制寄存器、34个内部中断源、2个外部中断引脚、2 kb双口RAM、1个看门狗定时器及DMA控制器。该芯片集成了SERCOS总线的数据链路层,通过设定片内寄存器和读写结构化的双口RAM即可实现总线通讯。这款芯片报文处理的时钟频率最高可达16 M,即可在最短为62.5μs的固定周期内实现一主多从的环形通讯。
接口卡微处理器选用TMS320F2812。TMS320F2812是在TMS320F24X的基础上开发的高性能定点数字信号处理器芯片,其先进的内部和外设结构使得该处理器特别适合电动机及其他运动控制应用。TMS320F2812具有32位定点DSP内核、主频达150 MHz、指令周期6.67 ns,片上有丰富的外设资源, 主要有18 kb的RAM、128 KB的Flash、事件管理器(EV)、16路12 位的A/D转换单元、3 个32 位的CPU 时钟、14 个CPU内核中断、3个外部中断、96个外设中断,以及串口外设包括eCAN 总线、McBSP、SPI 和SCI 接口等。
另外,本卡采用IS61LV25616AL外部扩展了256K×16的SRAM来满足SERCOS接口中大量IDN数据对内存的需求;显示诊断信息的四位LED数码管则由具有IIC总线的SAA1064来驱动;采用ATMEL公司生产的具有IIC总线接口的4K×16串行EEPROM AT24C16用来存放初始化参数,这些初始化参数根据具体的应用环境来确定,并由PC机通过SERCOS接口卡的RS232接口来对其进行读写。
3.2 SERCON816与微处理器的接口设计
SERCON816与TMS320F2812的接口电路见图2。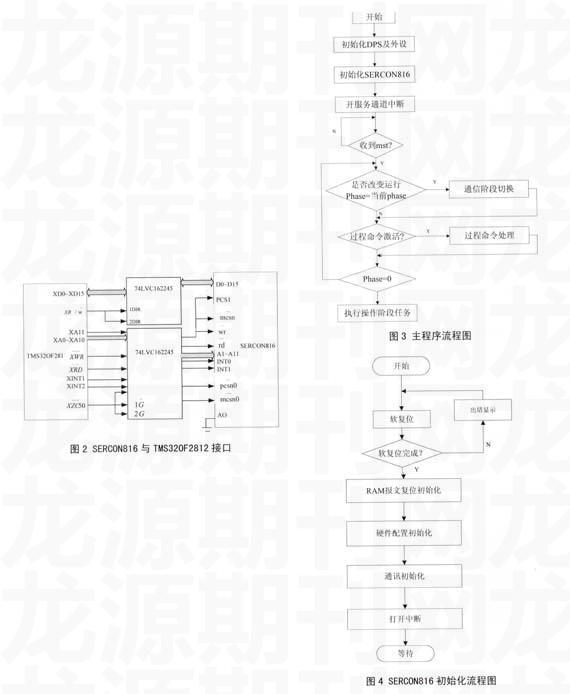
SERCON816采用+5V供电而TMS320F2812外设采用3.3V供电,所以在SERCON816与F2812的总线接口中要增加电平转换电路。在这里采用带方向控制引脚的16位总线缓冲器74LVC162245来实现此功能。
4SERCOS接口卡软件设计
3.1 主程序设计
软件系统在总体上分为主程序和中断服务程序。主程序主要实现系统初始化、SERCON816初始化及任务管理等功能。软件系统的主程序流程见图3所示。
4.2 SERCON816的初始化
SERCON816初始化主要包括RAM报文数据初始化、硬件配置初始化和通讯初始化,其硬件配置初始化和通讯初始化主要是通过设置控制寄存器中的相应位来完成的。流程图如4所示。
4.3 SERTCOS接口的初始化
SERCOS的初始化过程分为5个通信阶段,其流程见图5。
CP0:检查SERCOS环路是否闭合;
CP1:识别环路上的伺服装置,使用非周期性的数据传输。其工作原理是:主站依次向每个伺服装置发送MDTm(m是控制器的站地址)电报,MDTm的地址域中包含的是待识别的伺服装置的地址。如果被识别的伺服装置工作正常,则它应在下一个通信周期发送一个ATm电报作为应答。如果所有的伺服装置都正确作出应答,则可以进入下一个通信阶段CP2;
CP2:为周期性通信阶段CP3和CP4设置通信参数,使用和CP1相同的非周期性的数据传输;
CP3:继续设置相关的伺服参数,数据传输通过为周期性运行的电报实现;
CP4:结束初始化过程,系统进入正常运行阶段。在初始化过程中,如果伺服电源关闭或出现硬件故障,则状态返回到CP0的状态。
5结束语
SERCOS总线具有完全开放的通讯结构、严格的同步机制和极佳的抗干扰能力等优点,文章从SERCOS的特点出发,设计了基于SERCOS总线和DSP的无轴传动分布式同步控制系统接口卡,对SERCOS接口卡硬件部分及软件部分进行了具体的设计与分析。实践证明该方案在恶劣的环境下能够可靠地实现对多轴运动的实时同步控制,适应了当前国际市场与技术的发展。
参考文献
[1] 宋晓亮,康存锋,马春敏等.软PLC和SERCOS技术在无轴印刷控制系统中的应用[J].制造业自动化,2007,08:92-93
[2] 余义,杨建武,崔凯.开放式控制系统中SERCOS总线的接口设计与实现 [J].计算机测量与控制.2005,13(11):1257-1259
[3] RIGOBERT KYNAST.SERCOS interface Technical Overview.1999. http://www.sercos. org/pdf/praes-sercos -overview2.pdf
[4] 陈卫福,杨建武.开放式数控系统及SERCOS接口应用技术[M].机械工业出版社.2003
作者简介
王艳平,研究生,讲师;研究方向:现代控制网络与通信系统。