基于人工智能的煤矿皮带输送系统设计与实现
2024-05-06王帅
王 帅
(平顶山天安煤业股份有限公司五矿,河南 平顶山 467000)
0 引言
在当今工业化和信息化的快速发展下,煤炭作为基础能源的重要性不言而喻。煤矿皮带输送系统,作为煤炭生产中的核心环节,承担着将煤炭从采矿点有效、安全地输送到指定位置的关键任务。随着科技的进步,特别是人工智能技术的突破,如何利用这些先进技术优化煤矿皮带输送系统,成为电气技术与经济领域的一个研究热点。煤矿皮带输送系统的高效与安全直接关系到煤炭资源的有效利用及工作人员的生命安全,提高其自动化和智能化水平是实现煤矿生产现代化的重要手段。
1 人工智能的煤矿皮带输送系统设计与实现
1.1 硬件结构设计与实现
1.1.1 井下监控分站设计
在技术要素方面,井下监控分站的设计需要综合考虑数据采集、信号处理、通信接口和人工智能算法的实现,图1 为皮带输送机监控分站结构示意图[1]。在硬件结构设计中,人工智能的体现主要在于传感器的集成和高级控制系统的设计。传感器不仅用于监测基本参数,如温度、压力和负载,还用于收集更复杂的数据,如图像和声音,以支持更高级的AI 分析。数据采集模块须精确、可靠,能够捕捉到关键监控参数,如皮带速度、负载量、温度等。信号处理模块应有强大的数据处理能力,能够实时处理大量的传感器数据,确保信息的精确传输。通信接口则要保证与上位机及其他监控分站的高效、稳定连接。同时,人工智能算法的应用需要基于深度学习和模式识别技术,以实现复杂环境下的数据分析和决策支持。在设计原则上,井下监控分站的设计强调了可靠性、安全性和可扩展性。可靠性是指系统能够在恶劣的井下环境中长期稳定运行,对各种干扰有良好的抵抗能力[2]。安全性则涉及系统设计必须符合煤矿安全生产的相关规定,能够在出现危险情况时及时预警和采取措施。可扩展性表明监控分站在未来能够适应新技术的集成和系统升级,以适应不断变化的生产需求。井下监控分站设计中的人工智能应用,主要体现在智能诊断和预测维护方面。根据采集的数据,结合机器学习算法,监控分站能够对皮带运行状态进行实时分析,预测潜在的故障并提前提出维护建议,提高皮带输送系统的运行效率,显著降低意外停机的风险。
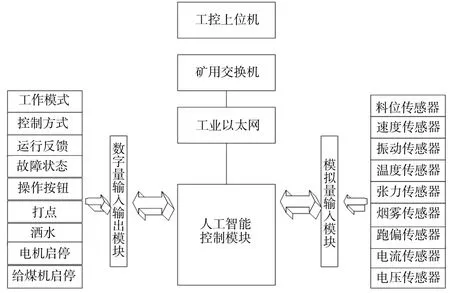
图1 皮带输送机监控分站结构示意图
1.1.2 监测传感器
监测传感器作为数据采集的基本单元,其性能直接影响到整个系统的准确性和可靠性。在这部分内容中,将深入探讨监测传感器的类型、特性、工作原理及其在智能化皮带输送系统中的应用。监测传感器的选择和配置需基于煤矿皮带输送系统的具体要求和环境条件。考虑到煤矿环境的特殊性,如高尘埃、湿度、振动和潜在的可燃气体,传感器需具备高度的防护等级、抗干扰能力和长期稳定性。此外,不同类型的传感器,如温度传感器、压力传感器、速度传感器以及负载传感器,需要根据其监测目标和精度要求进行精心选择和配置。
1.1.3 视频监控
视频监控系统的设计旨在实现对煤矿作业区域的全面视觉监控,以便及时检测并应对可能的安全隐患或效率损失问题。该系统的核心是高分辨率摄像头、先进的图像处理硬件以及与之配套的分析软件。这些摄像头能够捕捉到井下环境的详细视觉信息,包括设备运行状态、作业人员动态和环境条件等。图像处理硬件需具备高速处理能力,以支持来自多个摄像头的视频流的实时分析[3]。此外,配套的分析软件则应用先进的图像识别技术,如深度学习和模式识别算法,以自动检测视频中的异常模式,如设备故障、安全危险或非标准操作程序。视频监控系统的设计还须考虑井下环境的特殊性,包括高湿度、尘埃、震动和潜在的易燃气体环境。因此,摄像头和相关硬件设备应具有防爆、防尘、防水和抗震动的特性。同时,由于井下环境的光照条件可能较差,摄像头需要具备良好的低光性能,甚至红外或热成像功能。
1.2 软件结构设计与实现
1.2.1 控制主程序
控制主程序不仅需要处理来自传感器的数据,还要实时调节系统的运行状态,同时确保系统的最优性和稳定性。为了深入阐述这一点,本段将引入一个基于卡尔曼滤波的实时监测算法,并使用相关公式来展现其在控制主程序中的应用。同时,软件结构的设计重点在于集成人工智能算法,以及建立一个健壮的软件框架,支持复杂数据处理、决策制定和系统控制。
控制主程序的核心是实时数据处理和决策制定。考虑到煤矿皮带输送系统中数据的不确定性和动态变化性,卡尔曼滤波算法是一个理想的选择,借助使用机器学习算法,如深度学习神经网络,用于数据分析和模式识别,实现预测维护算法,通过分析历史数据和实时数据,预测系统可能的故障和维护需求,有效处理含有噪声的数据并提供准确的估计[4]。在实现卡尔曼滤波算法时,首先定义系统状态方程和测量方程,如下:
其中,xk是时间步k的系统状态,A是状态转移矩阵,B是控制输入矩阵,uk-1是控制输入,wk-1是过程噪声,zk是观测值,H是观测矩阵,vk是观测噪声。
接下来,实现卡尔曼滤波的关键步骤包括状态预测和更新。状态预测公式如下:
状态更新公式如下:
其中,Kk是卡尔曼增益,R是观测噪声协方差矩阵,是更新后的状态估计,Pk|k-1是更新后的估计误差协方差。
根据这种方法,控制主程序能够实时地处理和分析从煤矿皮带输送系统的各传感器收集到的数据。卡尔曼滤波算法不仅提供了对系统状态的最佳估计,还能够适应环境中的变化和不确定性,从而使控制主程序能够做出更加准确和有效的决策。控制主程序还需要考虑到数据的安全性和完整性,确保所有操作在规定的安全参数内进行。程序还需具备良好的用户界面,以便操作人员能够轻松地监控系统状态并作出调整。
1.2.2 运行速度控制程序
这一部分将重点介绍一种基于模糊逻辑控制器的算法,该算法用于实时调节皮带运输系统的运行速度,以确保运输效率和安全性。为了深入阐释这一算法,将使用相关公式来展示其在控制程序中的具体应用。
模糊逻辑控制器的设计基于模糊逻辑原理,其核心思想是模拟人类的决策过程,以处理不确定性和模糊性信息。在实现模糊逻辑控制器时,首先定义输入变量和输出变量[5]。假设输入变量为皮带负载量L和运行环境因素E,输出变量为皮带运行速度V。接下来定义模糊集和隶属度函数。例如,对于皮带负载量L,可以定义三个模糊集:“低”“中”“高”,并为它们分别定义隶属度函数。
接下来是模糊规则的制定,将AI 模块与现有的控制系统集成,确保数据和控制流的顺畅。例如,一个简单的规则可以是:“如果负载量L是高的,且环境因素E是不利的,则皮带运行速度V应该是低的。”这些规则反映了运行速度与负载量和环境因素之间的关系
模糊推理过程如下:
模糊化输入:将实际输入值转换为模糊值。例如,对于给定的负载量L,计算其隶属于各模糊集的程度:
应用模糊规则:根据模糊化的输入和模糊规则计算模糊输出。例如,根据上述规则,皮带运行速度的模糊输出V的隶属度可以表示为:
清晰化输出:将模糊输出转换为实际的控制量。这通常根据去模糊化过程实现,例如使用质心法计算实际的运行速度:
根据这种方式,运行速度控制程序能够实时地调整皮带输送系统的速度,以适应不同的运行条件和需求。模糊逻辑控制器提供了一种有效的方法来处理系统中的不确定性和模糊性,从而使控制程序能够在各种复杂环境下做出准确和灵活的决策。
运行速度控制程序还需要考虑数据的安全性和完整性,确保所有操作在规定的安全参数内进行。程序还需具备良好的用户界面,以便操作人员能够轻松地监控系统状态并作出调整。
2 系统功能验证
为了在煤矿皮带输送系统中验证人工智能的应用,本研究的实验计划融合了传统的系统测试方法和先进的人工智能技术。在设备选择时,选择煤矿皮带输送系统模型,配置高性能传感器组件(温度、压力、速度、负载传感器),设置视频监控设备,模拟煤矿环境(温度、湿度、灰尘水平),在系统中集成预先训练的人工智能模型。这些模型可能基于机器学习算法,如神经网络或决策树,用于识别和预测系统的异常行为,确保人工智能模型能处理来自传感器的实时数据,并做出快速响应。针对数据收集与分析,每分钟自动收集温度、压力、速度、负载等数据,人工智能算法分析这些数据,识别异常模式或趋势,通过模拟不同的工作条件(如不同的负载、速度、环境变化)测试系统的响应,用AI 算法分析在不同条件下的系统表现,比如负载变化对速度和压力的影响,对比五组实验数据,分别对温度、压力、速度、负载、准确性等数据进行收集(表1),检验数据准确性和一致性,根据测试结果和AI 分析,调整系统配置或算法参数并优化算法,以提高准确性和响应速度。根据分析数据显示,在不同时间点,这些参数的值有所变化,反映出系统在各种条件下的性能表现,这些数据对于评估系统的整体性能和确定进一步优化的方向至关重要。
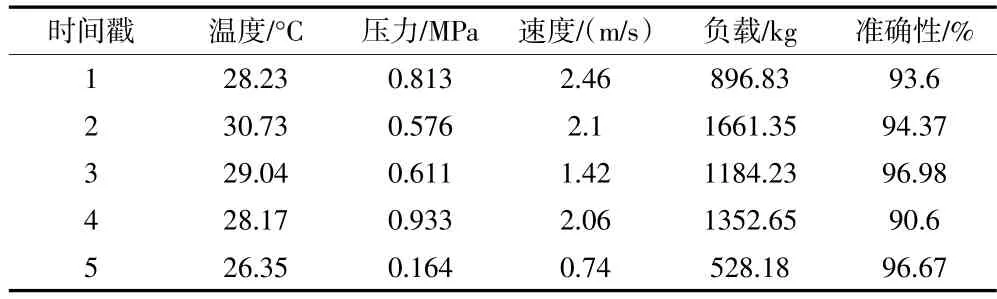
表1 系统功能验证数据
3 结语
煤矿皮带输送系统的设计需要考虑电机驱动、动力分配和电路控制等关键技术。而自动控制领域的知识则为系统的稳定运行和故障诊断提供理论支撑。信息处理技术,特别是人工智能的引入,为系统的数据分析和决策提供了新的思路。根据集成先进的传感器技术和监控系统,可以实现对皮带运行状态的实时监控,及时发现和处理潜在的安全隐患。此外,人工智能算法的应用还能优化系统的能源管理和运行策略,降低能耗,提高经济效益,旨在为煤炭工业的现代化进程提供科学的理论指导和实践方案,对推动煤矿安全生产和节能减排有重要作用。
