拉曼雷达重叠函数的模拟与校准
2024-04-25张鹭冼锦洪夏敏洁周晨
张鹭 冼锦洪 夏敏洁 周晨


摘要 重叠函数的校准对地基激光雷达低空大气探测的准确性至关重要。目前被广泛用于校准拉曼激光雷达重叠函数的双通道实验标定法,需要满足弹性散射通道与氮气拉曼散射通道的重叠函数近似相等的前置条件。但实际仪器光路往往会偏离理想状态,使得该前置条件无法得到满足,导致校准失败。本文使用光线追踪法模拟重叠函数,计算了各种光路失调情况下弹性散射通道与氮气拉曼散射通道的比值,并引入了一种镜头遮蔽实验来评估双通道实验标定法的前置条件是否得到满足。数值模拟结果表明,当雷达接收面的不同象限被遮蔽时,如果弹性散射通道与氮气通道的信号强度比值基本保持不变,则满足前置条件;如果弹性散射通道与氮气通道的信号强度比值有显著差异,则可判定仪器光学系统失调,需要调整直至满足上述前置条件时才能使用双通道实验标定法标定。利用該方法对南京市气象局安装的拉曼激光雷达进行了光路测评和调整,并与CCD(charge-coupled device)侧向成像激光雷达观测信号做对比,结果显示调整后的定标效果更好。
关键词大气探测;Raman激光雷达;数据质量控制;重叠函数
近年来,大气探测激光雷达由于其较高的探测精度、精细的时间分辨率以及较远的垂直探测能力等优势(田晓敏等,2018;王天河等,2020),被广泛地应用于大气污染物监测、气溶胶探测、云参数反演、边界层高度反演等重要领域(Cooney,1968;Winker et al.,1996;Matthias et al.,2004;Xie et al.,2007;Sugimoto et al.,2008;丁辉等,2015;Huang et al.,2015;Zhou and Yang,2015;Turner et al.,2016;Liu et al.,2017;Shen and Cao,2017;Zhang et al.,2018;黄悦等,2021;张培昌等,2021)。目前我国新的地基激光雷达观测网正逐步建设并陆续投入使用,然而该领域仍存在较多问题。激光雷达系统本身结构复杂,且精密仪器经过厂家调试后搬运到观测场地,即使受到轻微振动仍可能出现光路失调等问题。仪器受工作环境、硬件质量等因素影响出现故障也时有发生;不同生产厂家的雷达设计结构存在差异,由于新的探测仪器投入使用的时间尚短,所以目前有关雷达数据质控和校准还没有统一标准。这些情况都会直接导致雷达输出数据异常,使得激光雷达数据质量参差不齐,因此对激光雷达探测数据质量控制开展研究迫在眉睫,而对数据的质量控制是对激光雷达业务组网试验推进和深入研究的根本保障。
激光雷达利用望远镜系统接收大气回波信号,雷达发射系统和望远镜接收系统之间的视场匹配情况通过重叠函数反映。王威等(2014)指出重叠函数的大小直接反映探测盲区的大小,对雷达探测性能有着至关重要的影响。王欣红等(2023)指出近地面的盲区和过渡区是人类生产及活动的主要范围,是大气研究必须关注的区域,需要通过一定的技术获取重叠函数廓线并校正激光雷达回波信号。国内已有研究关注激光雷达重叠函数定标问题(龙强,2012;徐鑫鑫,2021)。激光雷达重叠函数的计算方法主要分为2类,第1类是理论计算法,即使用解析计算或数值模拟方法对重叠函数进行计算(Halldórsson and Langerholc,1978;Ancellet et al.,1986;Velotta et al.,1998;Berezhnyy,2009)。这类方法需要预先给定光学元件的精确参数和位置信息,但由于光学元件的参数常常不够精确,同时光学元件的实际位置总会或多或少地偏离理想状态,这使得实际的重叠函数常常与理论值存在较大差异。第2类是实验法,即通过实验测量结果对重叠函数进行标定(Sasano et al.,1979;Wandinger and Ansmann,2002;Biavati et al.,2011;Wang et al.,2015)。这类方法不受实际光路与理想状态偏差的影响,但往往需要满足额外的前置条件,惟此相应的实验法才适用。目前Wandinger and Ansmann(2002)提出的双通道实验标定法被广泛应用于拉曼激光雷达的数据校准,该方法要求氮气拉曼散射通道(氮气通道)和弹性散射通道(弹性通道)的重叠函数近似相同,对于准直性良好的拉曼雷达系统,该前置条件能够被满足,因此Wandinger and Ansmann(2002)没有给出判定这个前置条件的方法。然而,激光雷达属于精密仪器,在运输、搬运和安装过程中,轻微的振动可能会使激光雷达出现一定程度的光学系统失调。为此,本文引入一种镜头遮蔽实验(telecover test)用于激光雷达系统的准直性检验(Ansmann et al.,1990;Freudenthaler,2008),然而目前并不清楚系统准直性达到什么程度才能使用拉曼雷达重叠函数双通道标定算法,因此有必要对镜头遮蔽实验进行数值模拟。
本研究使用数值模拟方法分析重叠函数的影响因素,并引入一套镜头遮蔽测试方法来判定实验标定法的前置条件是否成立。该方法首先模拟了不同光学系统状态下镜头各点所对应的视场角,然后使用不同的视场角来模拟不同情况下各通道的重叠函数;采用该方法对南京市气象局架设的DSL20201224型拉曼激光雷达进行了评估和校准,通过光路调整和实验标定法有效提高了仪器探测精度,并结合CCD(charge-coupled device)侧向成像激光雷达的观测进行了验证。
1 重叠函数的数值模拟
1.1 重叠函数的定义
地基激光雷达通过仪器发射的激光与目标物散射光之间的关系来对特定变量进行反演。为了减少背景噪音和多次散射的影响,大部分激光雷达的观测视场角都较小,只有一部分到达雷达接收镜头的光束最终能够进入内部的传感器。重叠函数可以定义为在特定的距离下,接收系统视场内的回波能量占镜头接收到的总回波能量的比例,除以在较远的距离下(>3 km)视场内的回波能量占总回波能量的比例。近地面视场与激光束的重叠面积会随着距离的增加而变化,因此在计算近地面回波信号的强度时,一般会在激光雷达方程中加入随距离变化的重叠函数来描述回波信号的功率(Halldórsson and Langerholc,1978)。重叠函数在离激光雷达很近的区间接近于0,而在大于一定距离后则趋近于1。
1.2 重叠函数的计算
拉曼激光雷达(DSL20201224)的光学系统如图1所示。以抛物面主反射镜A的中心为原点,可建立一个坐标系,选取主反射镜的对称轴为坐标轴的z轴(向上为正),原点与激光发射管中轴的垂线为x轴(原点指向发射管的方向为正)。激光发射管中心轴的位置是x=80 mm、y=0 mm,发射管口处的激光束半径约为10 mm。望远镜上方任意点光强的分布可用高斯分布(Halldórsson and Langerholc,1978)来描述:
E(θ,z)=E0(z)exp-θ2θ2c 。 (1)
其中:z是空间点离望远镜接收面的高度;θ是发射管口与空间点连线和发射管轴线之间的夹角;E0(z)是特定高度下θ=0处的光强;θc是特定高度下的峰值半宽(在后面的数值模拟中设为0.5 mrad)。
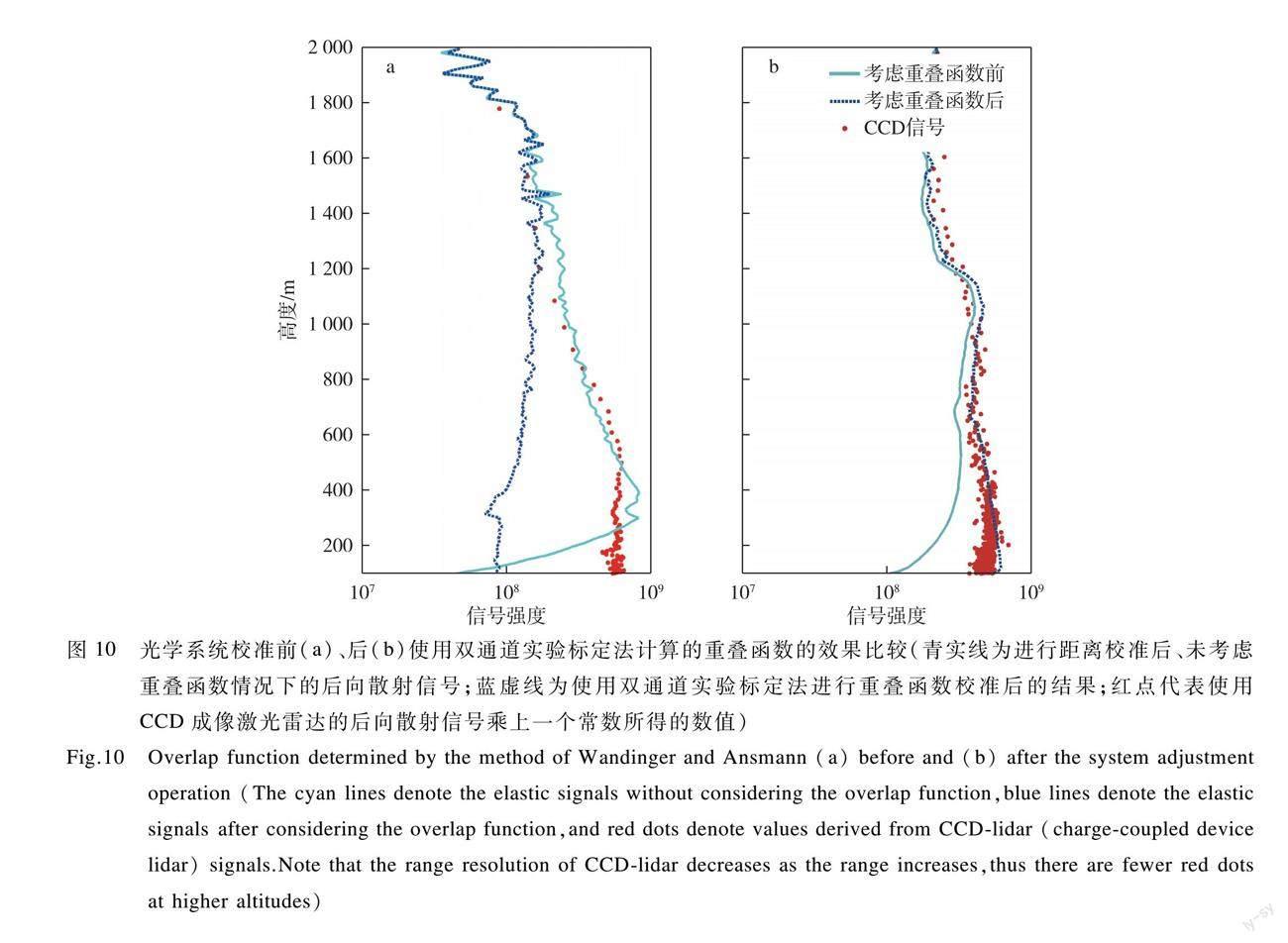
如果该空间点处于接收镜头某区域的视场内,那么射入这个镜头区域的后向散射光将能够被接收器所接收;如果空间点处于望远镜的视场外,其回波将无法被传感器所接收。计算每个高度下镜头上的每一个区域实际接收到的回波强度与射到该镜头区域(这里取-100 当接收系统处于不同状态时,重叠函数有如下3种情形:如果激光的轴线与视场轴线平行,近场的激光大部分不处于接收系统的视场内,而较远区域(>2 km)的激光则大部分处于视场内;因此,重叠函数在近场接近于0,在远场为1,并随距离的增加而单调递增。如果发射管的轴线与观测方向不完全平行,而在激光雷达的上方不远处与观测视场的轴线相交,那么交点附近的激光能量大部分会被接收系统所接收,远场只有部分回波处于视场内,重叠函数会先增加、后減小,并在交点处达到最大。如果发射激光的轴线与观测方向不完全平行,且激光轴线与视场轴线之间的距离随高度的增加而增加,远场只有部分激光处于视场内,则重叠函数会单调递增(Halldórsson and Langerholc,1978;Ancellet et al.,1986;Berezhnyy,2009;黄悦等,2021)。 1.3 望远镜视场角的计算 激光雷达是以脉冲激光器作为发射源,采用一组具有穿孔结构的光学系统向大气中发射高能量、窄脉冲宽度的脉冲激光束,通过望远镜收集大气中的气体、气溶胶微粒和分子产生的后向散射信号,经过光谱分析后将光电信号转换为电信号,得到所需的大气光学参数、水汽混合比等物理参数信息。 望远镜视场角的计算使用光线追踪方法。该方法将光近似分解为无数束宽度无限小的光线,每束光线都沿直线传播。使用理想公式来描述发射激光束的能量分布,同时忽略接收系统中衍射的影响。由于大气粒子的位置是随机的,所以射入激光雷达接收系统的光线之间会产生非相干叠加。以抛物面主反射镜A的中心为原点建立一个坐标系,选取主反射镜的对称轴为坐标轴的z轴(向上为正),原点与激光发射管中轴的垂线为x轴(原点指向发射管的方向为正)。主反射镜抛物面的方程可写为: x2+y2-2p1z=0, (2) 同时, R22≤x2+y2≤R21, (3) (x-xt)2+y2≥R23。 (4) 其中:R1(100 mm)是抛物面反射镜A的半径;R2(27.5 mm)是双曲面反射镜B的半径;R3(13 mm)是发射管外半径;xt是发射管中心离原点的距离;p1是主反射镜的焦距(158 mm)。当光垂直于镜面入射时,只有满足公式(3)和(4)的光线才能进入接收系统。此外,3个辐条都会阻挡光线的射入,进入这些区域的光都无法被探测到。 光线经反射镜A反射后会向抛物面的焦点汇聚,在到达焦点前会被双曲面反射镜B阻挡,双曲面反射镜B与抛物面A的焦点重合,因此光线经双曲面反射后会汇聚到双曲面的另一个焦点上。双曲面的方程可写为: (z-z0)2a2-x2+y2b2=1, (5) x2+y2≤R22,z-z0>0, (6) z0=p12-c。 (7) 其中:a和b都是双曲面的参数;z0是双曲面的对称面对应的高度;c是双曲面反射镜的半焦距(55 mm)。 在双曲面的下焦点上有一个孔径0.5 mm的光阑C,光束经过光阑以后,会被光阑后方的凸透镜D转换为平行光束。如果光学系统状态良好,穿过透镜D的大部分光束都能被接收器所吸收。然而,图1中的轴线DE、二向色片F(分光片)的角度在实际测量中都可能会偏离理想状态,这将会导致一部分光束无法进入接收器。在数值模拟的过程中,将z=0平面上的-100 2 评估光学系统失调产生的影响 2.1 光线追踪法视场模拟 利用光线追踪法分别模拟理想情况下的接收视场和光阑的位置偏离时氮气通道(607 nm)的接收视场,如图2所示。在理想情况下,望远镜上每个区域所对应的视场角除了上方双曲面反射镜和辐条的遮挡外,其他区域的视场角大小基本相同,平均为0.9 mrad左右(图2a)。 考虑光阑的位置沿x轴正方向偏离0.5 mm的情况。在这种状态下,望远镜上每个格点所对应视场的中心轴不再与主反射镜的轴线垂直,入射角的天顶角和方位角分别为π-β、0的光能够照射到正中心,其中β的值通过计算获得。对以(π-β,0)为轴的小范围内的光进行追踪,并计算出望远镜每个区域所对应的视场角。光阑在水平方向上的位置偏差会影响凸透镜D后方的光束传播方向,使得一部分光无法到达凸透镜E,因此激光雷达的接收面右侧区域的视场角接近于0,同时,接收面左侧的大部分区域视场角也小于理想状态(图2b);如果光阑的位置沿z轴向下偏离2 mm,光阑会挡住部分本应进入传感器的光,因此边缘区域视场角显著偏小,而接近圆心区域的视场角则有略微的减小(图2c);如果光阑的位置理想,而光轴DE向x轴偏离1°时,激光雷达的接收面左侧区域的视场角接近于0,而右侧则与理想状态相近(图2d)。 下面计算弹性通道的视场角。如果二向色片F处于理想状态,那么对于接收面上的任意一点,弹性通道的视场角都会与氮气通道完全相同(图3a、d)。如果二向色片F的角度略微偏离理想状态,那么弹性通道和氮气通道的视场角就会存在显著差异(图3b、c)。 2.2 光学系统失调对重叠函数的影响评估 当接收系统处于理想状态时,激光的轴线与视场轴线在3种不同角度状态下的重叠函数如图4所示。在理想状态下,激光的轴线与视场轴线完全平行,重叠函数在近场接近于0,在远场为1(图4中黑线),这与以往的研究结果一致(Ancellet et al.,1986;Berezhnyy,2009;黄悦等,2021)。如果发射管的轴线与观测方向不平行,二者在激光雷达的上方不远处相交,则重叠函数会先增加、后减小,且在交点处达到最大(图4中红线),这与Ancellet et al.(1986)的分析结果一致。如果激光轴线与视场轴线之间的距离随高度的增加而增加,则重叠函数单调递增(图4中蓝线)。 实验标定法要求弹性散射通道与氮气通道的重叠函数近似相等,即比值接近1。在接收视场处于如图3所示的偏离状态下,上述3种光轴状态下2个通道的重叠函数得到计算。当氮气通道视场与弹性散射通道视场相同时,它们的重叠函数相等,其比值近乎为1(图5a、d),满足重叠函数的双通道实验标定法的前置条件。当两个通道的视场不一样时,其重叠函数比值在近地面不再等于1(图5b、c),则无法满足前置条件,这主要是因系统的准直性失调所致。 2.3 镜头象限遮蔽实验 为判断重叠函数实验标定法的前置条件是否能够得到满足,引入镜头象限遮蔽实验,以检验激光雷达光学系统的准直性(Freudenthaler,2008;Rascado et al.,2011);同時,对镜头遮蔽实验进行扰动数值模拟,以量化系统准直性达到何种程度才能够满足拉曼雷达重叠函数双通道标定算法的前置条件。 图6a为DSL拉曼激光雷达接收面照片;图6b为遮蔽实验时象限划分示意图。沿Y=X和Y=-X两条线将接收面分为4个象限,其中激光发射器所在象限记为A象限,与A象限相对的象限记为B象限,Y轴的正轴所在象限记为C象限,Y轴的负轴所在象限记为D象限。镜头遮蔽实验是指对拉曼激光雷达接收面划分的象限进行4次测量,每次测量时遮住其他3个象限,只允许镜头通过剩下的1个象限来接收回波信号,以此对比4个象限接收到的信号强度,并使用数值模拟方法来计算象限遮蔽测试中的重叠函数分布。 当接收系统处于理想状态时,各象限在远场的未归一化重叠函数应是基本相同的,微小的差异主要来源于镜头上辐条和激光发射孔的不对称遮挡。C和D象限基本对称,因此这两个象限的重叠函数在各距离都大致相等;受激光发射器的影响,A象限的信号强度在近场略偏小,B象限的信号强度在近场略偏大(图略)。此时,氮气通道和弹性散射通道的重叠函数仍然一样(图7a)。当接收系统处于非理想状态时,如果氮气通道和弹性散射通道的视场不同,则这两个通道的未归一化重叠函数就会有较大差异,而且其比例在每个象限都会有较大差异(图7b、c);当接收系统处于非理想状态时,如果氮气通道和弹性散射通道的视场相同,则氮气通道和弹性散射通道的重叠函数基本相同(图7d)。 然而,仅通过上述方法并不能清楚系统准直性达到何种程度才能够满足拉曼雷达重叠函数双通道标定算法的前置条件。为了量化氮气通道和弹性散射通道接收信号的能量比例与这两个通道重叠函数比例之间的关系,进行了10 000组扰动数值模拟。在每组扰动实验中,光阑位置、二向色片的角度都会相对理想位置偏离一个随机值,同时激光与视场轴线的夹角也是随机的。在计算完每种情况下的重叠函数后,使用重叠函数比例的均方根偏差来描述两个通道重叠函数的差异: σOr=∑zmaxz=zminO532(z)O607(z)-12/(N-1)。 (8) 其中:zmin是评估时考虑的最小距离(这里取90 m,因为该仪器在90 m内的后脉冲噪音会产生显著误差);zmax是考虑的最大距离(这里取1 500 m,因为1 500 m以上重叠函数趋近于1);N是这个范围内高度层的数量。接下来使用激光雷达方程计算象限测试中均质大气下氮气通道与弹性散射通道的能量比例,并使用均方根误差计算其偏离理想状态的情况: σEr=∑4n=1E532,n/E607,nE532,avg/E607,avg-12/3。 (9) 其中:E532,n是第n个象限遮蔽测试中弹性散射通道在一定距离内(与计算σOr一样,取90~1 500 m)接收到的总能量;E607,n则是第n个象限遮蔽测试中氮气通道接收到的总能量。 扰动实验中σOr与σEr的统计关系如图8所示。易见,当σEr较小时,σOr也较小;当σEr较大时,σOr可能也较大。在象限遮蔽测试中,每两次测量之间的时间间隔很小,可认为大气状态在实验中基本保持不变。因此,如果在各个象限测试中氮气通道和弹性散射通道的信号值比例保持不变,就说明这两个通道的重叠函数基本相同,重叠函数实验标定法的前置条件能够被满足;反之,如果在各个象限测试中氮气通道和弹性散射通道的信号值比例有较大差异,就说明这两个通道的重叠函数会有较大的概率出现较大的差异,此时无法直接使用双通道重叠函数实验标定法。在实际操作中,可结合图8校准精度需求来选定σEr的阈值,并通过调整光路使σEr小于该阈值。 3 南京市拉曼激光雷达校准实验 利用象限遮蔽实验方法,以南京市气象局架设的DSL20201224拉曼激光雷达为例,进行光学系统准直性检验,对重叠函数实验标定法的适用性进行评估。选择晴空的2021年8月28日21时进行了一组象限遮蔽测试。图9是光学系统校准前、后的2次象限遮蔽测试结果。图9a显示,弹性散射通道的A、D象限接收到的信号非常低,而C象限接收到的信号则非常高,且这些信号存在明显的异常。同时,氮气散射通道中A、C象限信号非常强,B、D象限信号非常弱(图9b)。在各个象限测试中,弹性散射通道与氮气通道的比值存在巨大差异(图9c)。此时σEr为0.72,由图8知σOr较大;如果使用双通道实验标定法进行重叠函数的校准,则会产生较大误差。 為了解决这个问题,对仪器的光学系统进行校准,修正了系统的准直性,并于2022年3月5日重新进行了象限遮蔽测试。在这次实验中,弹性散射通道与氮气通道的比值基本保持不变(图9f)。此时,σEr为0.04,σOr的期望值显著小于校准前,基本满足了拉曼雷达重叠函数双通道实验标定法的前置条件。 将拉曼激光雷达的后向散射信号与不需要进行重叠函数校准(Barnes et al.,2003;Tao et al.,2014)的CCD侧向成像激光雷达观测信号进行对比,可验证调整前、后重叠函数的校准效果。利用Tao et al.(2014)提出的方法对近地面的气溶胶散射相函数进行测量,使用CCD相机对竖直向上发射的激光束进行成像,结合气溶胶散射相函数和成像激光雷达方程计算出后向散射信号的强度,便可与拉曼雷达得到的后向散射信号进行对比,从而为拉曼雷达定标(Wang et al.,2015)。选择晴朗的夜间,分别在光路调整前(2021年10月17日)和调整后(2022年3月5日)进行室外CCD(型号QHY90A)测量,结果如图10所示。光路调整前,拉曼雷达后向散射信号(考虑重叠函数)与成像激光雷达信号的偏差非常大(图10a),而光路调整至满足重叠函数标定前置条件后,拉曼雷达后向散射信号(考虑重叠函数)与成像激光雷达信号基本一致(图10b)。因此,验证光学系统准直性是否满足前置条件,是使用双通道实验标定法对重叠函数进行校准的基础,也是校准后数据质量的保障。 4 结论 本文使用理想数值模拟对南京市气象局的拉曼雷达进行了分析,计算了理想状态下激光雷达接收系统的视场,以及光学系统出现失调时的视场和重叠函数的变化。在理想数值模拟的基础上,引入镜头象限遮蔽实验方法,并应用该方法检验雷达光学系统准直性,从而判定拉曼雷达重叠函数实验标定法的前置条件是否得到满足。 以南京市气象局安装的拉曼雷达为例,安装完成后直接使用双通道实验标定法得到的重叠函数存在很大的偏差。利用象限遮蔽实验方法对光学系统的状态进行检验,发现雷达光学系统准直性较差,经过光路调整使得各个象限测试中氮气通道和弹性散射通道的信号比值保持不变后,再使用双通道实验标定法得到的重叠函数与成像激光雷达观测结果相符。实验表明,当氮气通道与弹性散射通道的能量比例均方根误差σEr调整到0.04时,能基本满足拉曼雷达重叠函数双通道实验标定法的前置条件。 虽然Wandinger和Ansmann的双通道实验标定法已被广泛地应用于拉曼雷达的校准,但由于仪器光学系统准直性不满足该方法的前置条件,所以导致计算的重叠函数出现较大偏差,从而严重影响了近地面的反演结果。本文方法能够有效验证双通道实验标定法的适用性,且具有很好的可操作性,有望在其他拉曼雷达上得到应用。相比须选择晴朗的夜间携带多件装备进行室外测量的CCD成像激光雷达观测标定方法,在验证前置条件满足的情况下,双通道实验标定法更具优势。 致谢:感谢南京市气象台姜有山台长对激光雷达调试实验给予大力支持。 参考文献(References) Ancellet G M,Kavaya M J,Menzies R T,et al.,1986.Lidar telescope overlap function and effects of misalignment for unstable resonator transmitter and coherent receiver[J].Appl Opt,25(17):2886-2890. Ansmann A,Riebesell M,Weitkamp C,1990.Measurement of atmospheric aerosol extinction profiles with a Raman lidar[J].Opt Lett,15(13):746-748. Barnes J E,Bronner S,Beck R,et al.,2003.Boundary layer scattering measurements with a charge-coupled device camera lidar[J].Appl Opt,42(15):2647-2652. Berezhnyy I,2009.A combined diffraction and geometrical optics approach for lidar overlap function computation[J].Opt Lasers Eng,47(7/8):855-859.doi:10.1016/j.optlaseng.2009.01.011. Biavati G,Donfrancesco G D,Cairo F,et al.,2011.Correction scheme for close-range lidar returns[J].Appl Opt,50(30):5872-5882.doi:10.1364/ao.50.005872. Cooney J A,1968.Measurements on the Raman component of laser atmospheric backscatter[J].Appl Phys Lett,12(2):40-42.doi:10.1063/1.1651884. 丁辉,牛生杰,张泽娇,2015.利用微脉冲激光雷达探测大气混合层高度和气溶胶垂直结构的初步研究[J].大气科学学报,38(1):85-92. Ding H,Niu S J,Zhang Z J,2015.Measurements of mixed layer height and aerosol vertical profiles using a micro pulse lidar[J].Trans Atmos Sci,38(1):85-92.doi:10.13878/j.cnki.dqkxxb.20120112001.(in Chinese). Freudenthaler V,2008.The telecover test:a quality assurance tool for the optical part of a lidar system[C]//24th International Laser Radar Conference.June Boulder,Colorado:23-27. Halldórsson T,Langerholc J,1978.Geometrical form factors for the lidar function[J].Appl Opt,17(2):240-244. Huang J P,Liu J J,Chen B,et al.,2015.Detection of anthropogenic dust using CALIPSO lidar measurements[J].Atmos Chem Phys,15(20):11653-11665.doi:10.5194/acp-15-11653-2015. 黄悦,陈斌,董莉,等,2021.利用星载和地基激光雷达分析2019年5月东亚沙尘天气过程[J].大气科学,45(3):524-538. Huang Y,Chen B,Dong L,et al.,2021.Analysis of a dust weather process over East Asia in May 2019 based on satellite and ground-based lidar[J].Chin J Atmos Sci,45(3):524-538.(in Chinese). Liu D,Liu Q,Bai J A,et al.,2017.Data processing algorithms of the space-borne lidar CALIOP:a review[J].Infrared Laser Eng,46(12):1202001.doi:10.3788/irla201746.1202001. 龙强,2012.基于激光雷达的低层大气光学特性探测研究[D].南京:南京信息工程大学. Long Q,2012.Optical properties of lower atmosphere derived from lidar measurement[D].Nanjing:Nanjing University of Information Science and Technology.(in Chinese). Matthias V,Balis D,Bsenberg J,et al.,2004.Vertical aerosol distribution over Europe:statistical analysis of Raman lidar data from 10 European Aerosol Research Lidar Network (EARLINET) stations[J].J Geophys Res:Atmospheres,109(D18):D18201.doi:10.1029/2004jd004638. Rascado J L,Guzmn F,Díaz J,et al.,2011.Quality assurance at the EARLINET Granada station:characterization of the optical subsystem for a multichannel Raman lidar[J].Optica Puray Aplicada,44:19-23. Sasano Y,Shimizu H,Takeuchi N,et al.,1979.Geometrical form factor in the laser radar equation:an experimental determination[J].Appl Opt,18(23):3908-3910. Shen J,Cao N W,2017.Inversion of tropospheric aerosol extinction coefficient profile by Mie-Raman scattering lidar[J].Chin J Lasers,44(6):304-313.doi:10.3788/cjl201744.0610003. Sugimoto N,Matsui I,Shimizu A,et al.,2008.Lidar network observations of tropospheric aerosols[C]//Proc SPIE 7153,Lidar Remote Sensing for Environmental Monitoring IX:43-55.doi:10.1117/12.806540. Tao Z M,Liu D,Wang Z Z,et al.,2014.Measurements of aerosol phase function and vertical backscattering coefficient using a charge-coupled device side-scatter lidar[J].Opt Express,22(1):1127-1134.doi:10.1364/oe.22.001127. 田曉敏,刘东,徐继伟,等,2018.大气探测激光雷达技术综述[J].大气与环境光学学报,13(5):321-341. Tian X M,Liu D,Xu J W,et al.,2018.Review of lidar technology for atmosphere monitoring[J].J Atmos Environ Opt,13(5):321-341.(in Chinese). Turner D D,Goldsmith J E M,Ferrare R A,2016.Development and applications of the ARM Raman lidar[J].Meteorol Monogr,57:18.1-18.15.doi:10.1175/amsmonographs-d-15-0026.1. Velotta R,Bartoli B,Capobianco R,et al.,1998.Analysis of the receiver response in lidar measurements[J].Appl Opt,37(30):6999-7007. Wandinger U,Ansmann A,2002.Experimental determination of the lidar overlap profile with Raman lidar[J].Appl Opt,41(3):511-514. 王天河,孙梦仙,黄建平,2020.中国利用星载激光雷达开展沙尘和污染研究的综述[J].大气科学学报,43(1):144-158. Wang T H,Sun M X,Huang J P,2020.Research review on dust and pollution using spaceborne lidar in China[J].Trans Atmos Sci,43(1):144-158.doi:10.13878/j.cnki.dqkxxb.20191120007.(in Chinese). 王威,毛飞跃,龚威,等,2014.基于激光强度分布的激光雷达重叠因子计算及其敏感性分析[J].光学学报,34(2):285-291. Wang W,Mao F Y,Gong W,et al.,2014.Overlap factor calculation method based on laser intensity distribution and its sensitivity analysis[J].Acta Opt Sin,34(2):285-291.doi:10.3788/AOS201434.0228005.(in Chinese). 王欣红,狄慧鸽,王娅娅,等,2023.基于气溶胶光学参数的拉曼激光雷达重叠因子校正方法[J].光学学报,43(6):91-101. Wang X H,Di H G,Wang Y Y,et al.,2023.Correction method of Raman lidar overlap factor based on aerosol optical parameters[J].Acta Opt Sin,43(6):91-101.doi:10.3788/AOS221295.(in Chinese). Wang Z Z,Tao Z M,Liu D,et al.,2015.New experimental method for lidar overlap factor using a CCD side-scatter technique[J].Opt Lett,40(8):1749-1752. Winker D M,Couch R H,McCormick M P,1996.An overview of LITE:NASAs lidar in-space technology experiment[J].Proc IEEE,84(2):164-180.doi:10.1109/5.482227. Xie C B,Zhou J,Yue G M,et al.,2007.New mobile Raman lidar for measurement of tropospheric water vapor[J].Front Electr Electron Eng China,2(3):338-344.doi:10.1007/s11460-007-0064-1. 徐鑫鑫,2021.激光雷達几何重叠因子自校正技术研究[D].西安:西安理工大学. Xu X X,2021.Research on automatic correction technique of geometric overlap factor of lidar system[D].Xian:Xian University of Technology.(in Chinese). Zhang J R,Chen Y B,Bu L B,2018.Analysis of a dust process in Beijing based on aerosol and atmospheric wind field lidar[J].Laser Optoelectron Prog,55(8):117-123.doi:10.3788/lop55.080102. 张培昌,顾松山,王振会,等,2021.气象万千探本索源:南京信息工程大学“大气探测学科”发展历程回顾与展望[J].大气科学学报,44(2):165-177. Zhang P C,Gu S S,Wang Z H,et al.,2021.Review and prospect of Atmospheric Sounding in Nanjing University of Information Science & Technology[J].Trans Atmos Sci,44(2):165-177.doi:10.13878/j.cnki.dqkxxb.20201004001.(in Chinese). Zhou C,Yang P,2015.Backscattering peak of ice cloud particles[J].Opt Express,23(9):11995-12003.doi:10.1364/oe.23.011995. ·ARTICLE· Simulation and calibration of Raman lidar overlap function ZHANG Lu1,XIAN Jinhong2,XIA Minjie1,ZHOU Chen3 1Nanjing Meteorological Bureau,Nanjing 210019,China; 2Shenzhen National Climate Observatory,Shenzhen Meteorological Bureau,Shenzhen 518040,China; 3School of Atmospheric Sciences,Nanjing University,Nanjing 210023,China Abstract Atmospheric detection lidar has been widely used in air pollutant monitoring,aerosol detection,cloud parameter retrieval,boundary layer height inversion and other important fields due to its high detection accuracy,fine time resolution and far vertical detection ability.In recent years,many new ground-based lidars have been applied to observation networks in China,providing many continuous vertical-profiling observations.However,the quality of ground-based lidar data is inconsistent,thus the quality control of lidar detection data is important.Specifically,unrealistic near-surface aerosol profiles can be found in some lidar products,indicating that the calibration of overlap function is crucial to improving the data quality of ground lidars.The experimental method proposed by Wandinger and Ansmann (2002),based on observations from two channels,is widely used to determine the overlap function of Raman lidars when external calibration instruments are unavailable.This method assumes that the overlap function in the elastic channel is approximately equal to that in the nitrogen channel.This assumption is valid when the lidar system is well aligned,thus Wandinger and Ansmann (2002) did not create a method to determine it.However,misalignments often occur in practice.After a lidar is initially calibrated after production,slight vibrations in the process of transportation,handling and installation may lead to misalignments,which may result in the precondition for the overlap function calibration method being invalid.It is unclear whether the method proposed by Wandinger and Ansmann (2002) can be used to calibrate the overlap function in reality,thus this paper introduces a telecover test to evaluate the validity of precondition for the calibration method.A ray tracing method is applied to the Raman lidar at the Nanjing Meteorological Bureau,and simulations are conducted to determine the overlap functions of both the elastic and nitrogen channels under various alignment conditions and during different telecover tests.The simulation results reveal that the precondition of the method proposed by Wandinger and Ansmann (2002) is valid when the ratio of elastic signals to nitrogen signals remains consistent across different quadrants of the telescope aperture.However,the precondition can be invalid when the ratio of elastic signals to nitrogen signals differs during different telecover tests.Using this method,the Raman lidar of Nanjing Meteorological Bureau was evaluated and adjusted.After the Raman lidar was initially installed,the results from telecover tests show that the signal strength of elastic scattering channel differs greatly from that of nitrogen channel.A test using the CCD-lidar (charge-coupled device lidar) system was applied to verify the overlap function determined by the dual-channel experimental method,and the results suggest that the error is high due to the invalidity of the precondition.To solve this problem,we adjusted the lidar optical system to improve its collimation.After this,we performed the telecover test again,and the signal strength of elastic scattering channel was basically the same as that of nitrogen channel.Our numerical simulations suggest that the preconditions of Raman radar overlapping function calibration method can be basically satisfied after the adjustment.The CCD-lidar test was performed again,and this time the overlap function determined by the dual-channel experimental calibration method was constant with CCD-lidar.The method proposed in this paper can effectively verify the applicability of the dual-channel experimental calibration method,and has good operability,thus this method could be applied to other Raman lidars in the future.Compared with the CCD-lidar observation calibration method which requires outdoor operations at clear-sky nighttime,the dual-channel experimental calibration method has greater advantages when the preconditions are met. Keywords atmospheric sounding;Raman lidar;data quality control;overlap function doi:10.13878/j.cnki.dqkxxb.20230512003 (責任编辑:倪东鸿)