基于模糊解耦控制的质子交换膜燃料电池阴极控制方法研究
2024-04-23曹菁王心坚倪淮生
曹菁 王心坚 倪淮生


【摘要】为实现质子交换膜燃料电池(PEMFC)空气子系统流量和压力的协调控制,应用模糊控制原理,采用Mamdani模糊推理方法推理了模糊解耦控制规则,配合MAP前馈控制,组合设计了模糊解耦复合控制器,最后,将其与模糊PID控制器进行对比测试并补充环境适应测试,结果表明,变载工况下模糊解耦控制器的流量控制误差小于±3 g/s,压力控制误差小于±10 kPa,具有良好的解耦控制效果,同时具有很好的环境适应性。
关键词:质子交换膜燃料电池 阴极 模糊控制 模糊解耦控制
中图分类号:TM911.4 文献标志码:A DOI: 10.20104/j.cnki.1674-6546.20240024
Research on Cathode Control Method of PEMFC Based on Fuzzy Decoupling Controller
Cao Jing1, Wang Xinjian1, Ni Huaisheng2
(1. Tongji University, Shanghai 201804; 2. Zhejiang Tianneng Hydrogen Energy Technology Co., Ltd., Huzhou 313199)
【Abstract】To realize the coordinated control of the flow pressure of the air subsystem for Proton Exchange Membrane Fuel Cell (PEMFC), this paper applied the fuzzy control principle and the Mamdani inference method to reason the control rules of fuzzy decoupling control, to design the fuzzy decoupling composite controller with MAP feedforward control. Finally, the comparison test with the fuzzy PID controller and the supplementary environment adaptation test were carried out. The results show that the fuzzy decoupling controller can achieve better control effect and has good environmental adaptability with flow control error less than ±3 g/s, and pressure control error less than ±10 kPa.
Key words: Proton Exchange Membrane Fuel Cell (PEMFC), Cathode, Fuzzy control, Fuzzy decoupling control
【引用格式】曹菁, 王心坚, 倪淮生. 基于模糊解耦控制的质子交换膜燃料电池阴极控制方法研究[J]. 汽车工程师, 2024(3): 15-20+27.
CAO J, WANG X J, NI H S. Research on Cathode Control Method of PEMFC Based on Fuzzy Decoupling Controller[J]. Automotive Engineer, 2024(3): 15-20+27.
1 前言
燃料电池系统需要快速响应负载的变化,然而,空气在到达阴极参与反应前,必须经过压缩机和传输管道,存在较长的传输延迟。如何根据负荷变化控制空气压缩机提供的空气流量和压力一直是学者们关注的热点问题。
目前,空气子系统的主流控制方法有PID控制方法、模糊控制方法、模型预测控制(Model Predictive Control,MPC)算法和神經网络算法等。张新义利用MATLAB/Simulink建立了空气传输系统模型和控制策略,并进行了联合仿真,证明了PID控制方法能够满足燃料电池在不同工况下对空气传输系统的控制需求[1],但未考虑流量和压力的耦合。王昭懿针对质子交换膜燃料电池(Proton Exchange Membrane Fuel Cell,PEMFC)系统空气流量和压力的耦合问题,设计了一种二阶自抗扰控制(Active Disturbance Rejection Control,ADRC)解耦控制策略,并通过仿真验证了该策略具有较好的解耦和控制效果[2]。秦彪等提出了一种基于自适应超螺旋(Adaptive Super-TWisting,ASTW)算法的滑模控制器,仿真对比结果表明,ASTW滑模控制在氢气、氧气过量比调节,阴、阳极压力控制方面比常规PID控制方法效果更好[3]。虽然解耦控制器和滑模控制器的控制效果良好,但空气子系统的传递函数和特征值获取较为复杂,不利于推广。叶玺臣等提出了一套基于PID控制和模糊控制的无解耦阴极气体压力和流量的闭环控制算法,经30 kW燃料电池系统台架验证,具有很好的动态和稳态控制效果[4]。王述彦等基于模糊控制和PID控制各自的优势和局限性,将两者结合构成了模糊PID控制,利用模糊控制进行PID参数的自整定,实现了较好的控制效果[5]。石晨旭等提出了“MAP前馈+PID反馈”的控制算法,并在台架测试中对控制算法进行了标定及性能验证,取得了良好的控制效果[6]。Tian等提出了一种基于MPC和PID控制的混合控制方案,其中MPC采用神经网络和查表方法来减少控制模型与被控系统间的不匹配问题。预测控制多用于线性系统,对于PEMFC一类的非线性模型,模型预测控制需要预先消耗一定的时间来计算模型,从而形成近似线性的模型表达式。此外,模型预测控制器存在参数不确定性,具有脆弱性[7]。Victor等提出了一种考虑系统强非线性的神经网络控制器,并在PEMFC硬件在环仿真模拟器上进行了测试,结果表明,该控制器具有很强的自适应性和鲁棒性[8]。
本文基于前人的研究成果,提出一种模糊解耦复合控制器,基于目标空气流量和空气进堆压力与实际值的变化趋势对空气压缩机和背压阀进行控制,并采用模型在环(Model in the Loop,MIL)仿真测试将其与模糊PID控制算法进行对比分析。
2 控制器设计
2.1 模糊PID控制器设计
典型的PID控制器是一种线性控制器,控制器的时域输出u(t)为:
式中:KP、KI、KD分别为比例系数、积分系数、微分系数,e(t)为系统偏差量。
传统PID控制设计简单、控制效果优异,但控制精度不高,在负载剧烈变化时易产生抖动。据此,许多学者对传统PID控制器进行优化,使其具有更高的精度和鲁棒性,如自适应PID、模糊PID、神经网络PID[9]。
Ying在模糊控制理论中首次严格建立了模糊控制器与传统控制器的分析解关系,尤其是证明了Mamdani模糊PI(或PID)型控制器是具有变增益的非线性PID控制器。基于PID参数的线性优化能够在控制过程中保持更好的稳定性,因此在各类模糊控制器中,本文采用增益调整型模糊PID控制器。
增益调整型模糊PID控制器的一种形式是基于误差驱动的,典型的控制架构如图1所示。其中,e为目标值与实际值的差值,[e]为差值变化率,?、 分别为e、[e]的模糊化隶属度函数,?为模糊控制的推理输出。
本文采用文献[10]归纳制定的模糊控制规则:
a. 启动或者停止时,误差e较大,为加快响应速度,可以取较大的KP;为避免开始时可能出现的微分饱和,KD取中等值;为防止出现较大的超调,产生积分饱和,可去掉积分作用,即KI=0。
b. 被控对象正常运行后,e和[e]都处于中等大小,为了降低超调,KP应取较小的值,KI取中等值,此时主要影响系统响应的是KD,应取中等值。
c. 被控对象稳定运行时,误差e较小,可以增大KP和KI,此时KD将影响系统的抗干扰性能,一般[e]较小时,KD取值大一些,[e]较大时,KD取值小一些。
根据以上分析制定模糊控制规则如表1所示。采用二输入三输出的二维模糊控制器,其中包括3个模糊控制规则,从左至右分别为KP、KI、KD的模糊控制规则。其中,PB、PS、ZE、NS、NB分别为大值、较大值、中等值、较小值、小值。
得到模糊控制规则后利用MATLAB的模糊控制设计工具箱(Fuzzy Logic Designer)搭建二输入、三输出的模糊控制器,如图2所示。
通过凑参数法确定初始的KP、KI、KD取值分别为0.1、0.1、0.001。模糊控制器的输入值域均为-1~1,输出值域均为0~1,通过增益模块对输入、输出参数进行适配。
2.2 模糊解耦复合控制器
模糊解耦复合控制器由MAP前馈控制+模糊解耦控制器组成。基于实际运行工况标定的MAP前馈控制器是工程实际应用中常用的控制器之一,具有快速响应的特点。但标定的参数一般具有局限性,包括温度、压力和零部件自身的性能差异及衰减。因此,在标定的MAP前馈控制的基础上,应用模糊控制器进行补偿,能够大幅提高控制器的适用性。复合控制器架构如图3所示。
由于空气子系统的压力和流量间存在较强的耦合性,本文采用文献[11]所提出的模糊解耦控制器。同时,为了更好地进行对比分析,对其进行了一定的优化。根据工程经验,应用Mamdani模糊推理方法,制定基于流量、压力变化的空气压缩机、背压阀的模糊控制规则,如表2所示。
基于以上模糊控制规则搭建二输入、二输出的模糊控制器,如图4所示。其中,ep为压力差,em为流量差,均为目标值与实际值的差,CompSet、BPVSet分别表示空气压缩机的转速设定、背压阀的开度设定。输入、输出的阈值区间均为[-1,1],同样通过增益模块对输入、输出参数进行适配。
基于此模糊控制器在Simulink环境中搭建模糊解耦復合控制器,如图5所示。前馈MAP基于电堆的目标输出电流查表得到空气压缩机目标转速和背压阀目标开度,数据由实际运行标定获取,如表3所示。
3 模型控制仿真与分析
3.1 仿真测试模型
系统的仿真被控对象模型采用dSPACE公司的ASM燃料电池模型库。上位机软件ControlDesk可以随时调用Simulink模型的数据流和参数信息,方便对控制模型或被控对象模型进行调试优化。基于ASM模型库搭建的空气子系统模型如图6所示。
其中主要的建模对象为空气压缩机和背压阀。空气压缩机的物理模型基于MAP构建,MAP使用制造商提供的稳态测量数据进行参数化,在MAP生成过程中,执行校正(或归一化)以考虑各入口的气体条件。测量数据以常见的流体参考条件(参考入口温度或参考总入口压力)为参考。校正变量的方程为:
式中:[m]、[mcorr]分别为空气流量和校正后的空气流量,TIn、pIn分别为空气压缩机的入口温度和入口压力,Tref、pref分别为压缩机的参考入口温度和参考入口压力,nTC、nTC,corr分别为空气压缩机转速和校正后的空气压缩机转速。
背压阀模型用于计算流过背压阀的空气流量,背压阀自身是可变流通截面积的孔,流通截面积取决于阀板的开度[12]。流经阀门的质量流量为:
式中:AThr为阀门的开口横截面积,取决于阀门阀板开启的角度;φ为流量函数;kThr为阀门的绝热指数;p1、p2分别为阀门前、后的压力;RThr为流经阀门气体的气体常数;pThr为阀门处的压力;TThr为阀门处的温度。
此外,参数化软件ModelDesk可以利用实际系统零部件的参数对被控对象模型进行快速的模型参数化,使模型达到接近实际被控对象的外特性表现。本文的空气子系统模型是基于某120 kW燃料电池系统建立的,其主要零部件参数如表4所示,空气压缩机的通用特性曲线(25 ℃,100 kPa)如图8所示。
3.2 仿真测试与分析
首先对模糊PID控制方法进行流量的仿真测试,结果如图9所示。
仿真测试结果表明:稳态工况下,模糊PID控制器的控制效果与单PID控制器基本一致,这是因为PID控制器具有消除稳态误差的特性;动态工况下,模糊PID控制器的最大流量超调量为-3.6%,绝对值明显较单PID控制器的最大超调量(-6%)绝对值小,这是因为在误差较大时,模糊控制器对KP、KI、KD进行了补偿,加快了调节速率。仿真测试结果证明了模糊PID控制器的有效性。
应用同一工况对模糊PID控制器和模糊解耦复合控制器分别进行流量和压力的仿真测试,结果如图10所示。模糊PID控制器与模糊解耦复合控制器的控制效果接近,最大误差均不超过3 g/s,满足燃料电池系统的应用要求,同时也能快速收敛误差。
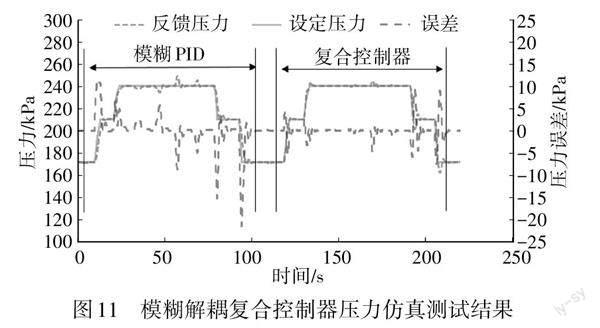
压力仿真测试结果如图11所示,模糊解耦复合控制器的压力控制误差小于±10 kPa,控制效果明显优于模糊PID控制器。这是因为模糊PID控制器未实现流量和压力的解耦,而模糊解耦复合控制器通过模糊解耦控制器的解耦作用,实现了流量和压力的解耦,取得了更好的控制效果。
综合考虑控制器设计难度、控制效果,基于模糊解耦控制的模糊解耦复合控制器略优于模糊PID控制器。
此外,控制器实际应用中还需要考虑环境因素对控制效果的影响。因此,进一步在不同的环境温度和环境压力下对模糊解耦复合控制器进行仿真测试。如图12和图13所示,仿真测试结果表明,在不同的环境温度和环境压力下,模糊解耦复合控制器的控制效果均不受影响,证明了模糊解耦复合控制器具有很好的环境适应性。
4 结束语
本文针对PEMFC空气子系统的控制需求,提出了模糊解耦复合控制器,同时基于前人的研究设计了模糊PID控制器,对两个控制器進行了MIL仿真测试,结果表明,模糊解耦复合控制器的流量控制误差小于±3 g/s,压力控制误差小于±10 kPa,具有良好的解耦控制效果。此外,经过补充测试,证明了模糊解耦复合控制器同样具有良好的环境适应性。
参考文献
[1] 张新义. 基于PID控制方法的燃料电池空气供应系统控制研究[J]. 时代汽车, 2020(6): 40-46.
ZHANG X Y. Research on the Control of Fuel Cell Air Supply System Based on PID Control Method[J]. Auto Time, 2020(6): 40-46.
[2] 王昭懿. 车用质子交换膜燃料电池空气供给系统建模及控制策略研究[D]. 长春: 吉林大学, 2022.
WANG Z Y. Research on Modeling and Control Strategy for Air Supply System of Vehicle Proton Exchange Membrane Fuel Cell[D]. Changchun: Jilin University, 2022.
[3] 秦彪, 王新立, 王雷, 等. 燃料电池供气系统的自适应滑模控制[J]. 控制理论与应用, 40(11): 2049-2058.
QIN B, WANG X L, WANG L, et al. Adaptive Slide Mode Control of Gas Feeding of PEM Fuel Cell System[J]. Control Theory & Applications, 40(11): 2049-2058.
[4] 叶玺臣, 章桐, 刘毅. 燃料电池系统阴极气体压力及流量闭环控制[J]. 汽车技术, 2022(6): 14-19.
YE X C, ZHANG T, LIU Y. Cathode Gas Pressure and Mass Flow Rate Closed-Loop Control in Fuel Cell System[J]. Automobile Technology, 2022(6): 14-19.
[5] 王述彦, 师宇, 冯忠绪. 基于模糊PID控制器的控制方法研究[J]. 机械科学与技术, 2011, 30(1): 166-172.
WANG S Y, SHI Y, FENG Z X. A Method for Controlling a Loading System Based on a Fuzzy PID Controller[J]. Mechanical Science and Technology for Aerospace Engineering, 2011, 30(1): 166-172.
[6] 石晨旭, 杜常清, 王超, 等. 车用大功率燃料电池发动机进气系统控制[J]. 汽车工程, 2023, 45(11): 2148-2156.
SHI C X, DU C Q, WANG C, et al. Control of Gas Supply System of High Power Fuel Cell Engine for Vehicle[J]. Automotive Engineering, 2023, 45(11): 2148-2156.
[7] TIAN Y, ZOU Q, LIU J Q, et al. Novel Hybrid Control Scheme of a Proton Exchange Membrane Fuel Cell Air Supply System[J]. Energy Technology, 2022, 10(2).
[8] SANCHEZ V M, BARBOSA R, ARRIAGA L G, et al. Real Time Control of Air Feed System in a PEM Fuel Cell by Means of an Adaptive Neural-Network[J]. International Journal of Hydrogen Energy, 2014, 39(29): 16750-16762.
[9] WANG Y J, YANG X L, SUN Z D, et al. A Systematic
(下转第27页)
(上接第20页)
Review of System Modeling and Control Strategy of Proton Exchange Membrane Fuel Cell[J]. Energy Reviews, 2024, 3(1).
[10] 胡包钢, 应浩. 模糊PID控制技术研究发展回顾及其面临的若干重要问题[J]. 自动化学报, 2001(4): 567-584.
HU B G, YING H. A Review of the Research and Development of Fuzzy PID Control Technology and Some Important Problems It Faces[J]. Acta Automatica Sinica, 2001(4): 567-584.
[11] 郭昂, 王福, 鄧召文. 燃料电池空气子系统模糊解耦控制仿真与试验[J]. 拖拉机与农用运输车, 2022, 49(6): 27-32.
GUO A, WANG F, DENG Z W. Decoupling Control Simulation and Experiment for PEMFC Air Supply System[J]. Tractor & Farm Transporter, 2022, 49(6): 27-32.
[12] PUKRUSHPAN J T. Modeling and Control of Fuel Cell Systems and Fuel Processors[D]. Ann Arbor, Michigan, USA: University of Michigan, 2003.
(责任编辑 斛 畔)
修改稿收到日期为2024年1月27日。
