PIND相关标准变更的影响及其应用的讨论
2024-04-01朱文鹏柯琼瑞
朱文鹏,陈 杨,柯琼瑞
(1.西安西谷微电子有限责任公司,陕西 西安 710077;2.广州市科唯仪器有限公司,广东 广州 510000)
粒子碰撞噪声检测 (PIND)应用范围非常广,其有着非常严格的标准。而当相关标准出现变化时,也会对其检测结果带来一定的影响。因此,需要对PIND相关标准变更带来的影响进行明确。而美国在相关领域的研究一直都是处于领先地位,其相关标准可以为国内标准的改善提供借鉴。
1 粒子碰撞噪声检测试验原理和应用
粒子碰撞噪声检测其原理是利用振动台产生一系列指定的机械冲击和振动,通过冲击使被束缚在产品中的颗粒(即多余物)松动,再通过一定频率的振动,使多余物在系统元件内部产生随机的位移,碰撞到元件内腔的腔壁或者底座上,就会产生应力弹性波和声波。声波经封盖传播至PIND传感器耐磨板(试样安装面)并使之产生轻微形变,耐磨板的变形会引起与之紧贴的压电晶体被压缩,压电晶体因而输出电压信号。输出电压信号被定义为位移信号。经前置放大器放大,位移信号由检测装置的主机采集、处理并显示。检测人员可以依据显示的信号波形判定出信号性质,以此得出检测结论。
2 标准变更的比对
2.1 GJB548《微电子器件试验方法和程序》中粒子碰撞噪声检测试验的历史演变及变更
2.1.1 历史版本与美军标对应关系
①GJB548-88方法2020依据美军标MILSTD-883C为蓝本;②GJB548A-96方法2020A依据美军标MIL-STD-883D为蓝本;③GJB548B-2005方法2020.1依据美军标MILSTD-883E为蓝本;④GJB548C-2021方法2020.2依据美军标MIL-STD-883K为蓝本,MIL-STD-883L于2019年09月16日替代MIL-STD-883K。
2.1.2 GJB548C与MIL-STD-883K/L中关于PIND试验的主要区别
①MIL-STD-883K/L明确规定,禁止批量或一次对多只样品进行试验;②GJB548C增加了不允许对超过传感器托盘直径的大型器件进行试验的规定;③GJB548C增加条件B的计算公式和最小频率要求;④GJB548C-2021方法2020.2条件A和条件B,依据MIL-STD- 883K中公式(1)转换而来,公式如下:
条件A:20是此应用中的常数,等于20 g的正弦加速度。
条件B:10是此应用中的常数,等于10 g的正弦加速度。
D=平均内部封装高度(以英寸为单位)。
0.051 1为固定系数(以英寸为单位),转换以毫米为单位,固定系数为0.019 7。
⑤GJB548C腔高为最大自由活动腔高,美军标MIL-STD-883K/L的腔高为内腔的平均高度。通过中美历史军标对比分析,且同国内外元器件生产厂家PIND试验应用分析,同一封装一定数量器件内腔高度存在公差,封装内腔的平均高度描述更为准确。
2.2 GJB128《半导体分立器件试验方法》中粒子碰撞噪声检测试验的历史演变及变更
2.2.1 历史版本与美军标对应关系
①GJB128-86方法2052依据美军标MIL-STD-750C为蓝本;②GJB128A-97方法2052依据美军标MIL-STD-750D为蓝本;③GJB128B-2021方法2052依据美军标MIL-STD-750F为蓝本。
2.2.2 GJB128B与MIL-STD-750E中关于PIND试验的主要区别
①MIL-STD-750E,阈值(20±1)mV更改为(15±1)mV,GJB128B阈值依旧为(20±1) mV;②MIL-STD-750F明确了:腔体高度<0.58 mm的器件,振动频率=130 Hz;腔体高度>6.35 mm的器件,振动频率=40 Hz;③GJB128B-2021规定振动机驱动频率(f)与外壳内腔高度的关系公式(1)限于40Hz~130 Hz频率范围内使用。
2.3 GJB65《有可靠性指标的电磁继电器总规范》附录B《粒子碰撞噪声检测》的历史演变及变更
①GJB65-85附录B依据美军标MIL-PRF-39016C为蓝本;②GJB65A-91附录B依据美军标MIL- PRF -39016D为蓝本;③GJB65B-1999附录B依据美军标MIL- PRF -39016E为蓝本;④GJB65C-2021附录B依据美军标MIL- PRF-39016F后期版本。
注:美军标MIL- PRF -39016F将“3.27”微粒碰撞噪声检测试验全部内容删去,同时将“附录B”的内容也删除。且后期版本无PIND试验的说明。MIL-PRF-6106P电磁继电器通用规范,也无PIND试验的说明。但没有其他试验可替代PIND试验。美国三大继电器制造商,依旧依据美军标MIL- PRF -39016E或根据产品特性,自定义PIND的试验条件和方法。
2.3.1 GJB65C相比较GJB65B增加项
(1)明确失效模式。①存在粒子;表示器件内部存在粒子;②机械噪声过大;表示同步机械波过大,可能掩盖粒子波形。
(2)自动化检测系统的要求。自动化检测系统的要求,采样频率至少达到500 kHz;同步采集两路信号,采集数据时间不少于30 s。自动检测分析软件包含:试验条件设定、试验数据存储、试验数据自动分析判断、试验波形回放、试验数据管理等,自动分析软件可自动给出PIND检测结果。
(3)失效判据增加自动检测系统,“动态波形”代替“示波器”监测。增加动态波形图。
2.3.2 GJB65C试验条件A/B程序顺序说明
GJB65-85,GJB65A-91,GJB65B-1999,GJB65C-2021对应的美军标MIL-R-39016C/D/E/F/H/J系列,美军标MIL-R-39016C/D/E/F/H/J系列编写参考美国BW公司和美国SD公司设备,BW公司与SD公司PIND设备有一定的不同点,区别是BW公司设备含有预冲击功能装置,而SD公司无预冲击功能装置。(国产PIND设备,多以仿制SD公司设备为主)。故GJB65C试验条件A/B程序顺序不能依据字面描述,需了解军标的出处和设备的原理,GJB65-85,GJB65A-91,GJB65B-1999, GJB65C-2021都有关于预冲击的说明,以GJB65C-2021为例,GJB65C-2021-3.5-c)如果在附加冲击试验前或其后5s之内无粒子指示,该继电器应接受。当采用预冲击代替附加冲击试验时,在10 s的振动过程中,不应该有粒子显示。
正确的GJB65C试验条件A/B程序顺序如下:(限SD公司、哈工大、成都频德PIND设备,BW公司PIND设备不适用)。

3 行业内关于条件B的异议
美军标MIL-STD-750,MIL-STD-883均未明确说明条件B,关于平均腔高和频率的对应关系。GJB128B和GJB548C试验条件B都面临同样的问题。行业内有两种不同的观点。
3.1 关于条件B的两种不同观点
观点一:早期观点,不确定器件腔体高度的情况下,使用固定频率,对应条件B,(10 g,60 Hz)。例如:QJ2863-96《航天用电子元器件颗粒碰撞噪声检测要求和方法》-方法100-3.3.1试验条件。
观点二:条件B关于平均腔高和频率的对应关系,应依据试验条件A平均腔高和频率的对应关系,只是振动加速度为调整10 g。
3.2 支持观点二的两点依据
(1)粒子输出噪声电压(Vout)与试验频率呈负相关,试验频率越大,输出电压越小,且质量越大的粒子,其噪声电压随试验频率的增加而减小的幅度就越快。如下图1。

图1 粒子输出噪声电压 ( Vout) 与试验频率关系
(2)器件中心位置与传感器中心位置越远,位移信号的传输出路径就越长,信号传递率就降低。国内外PIND设备见表1。
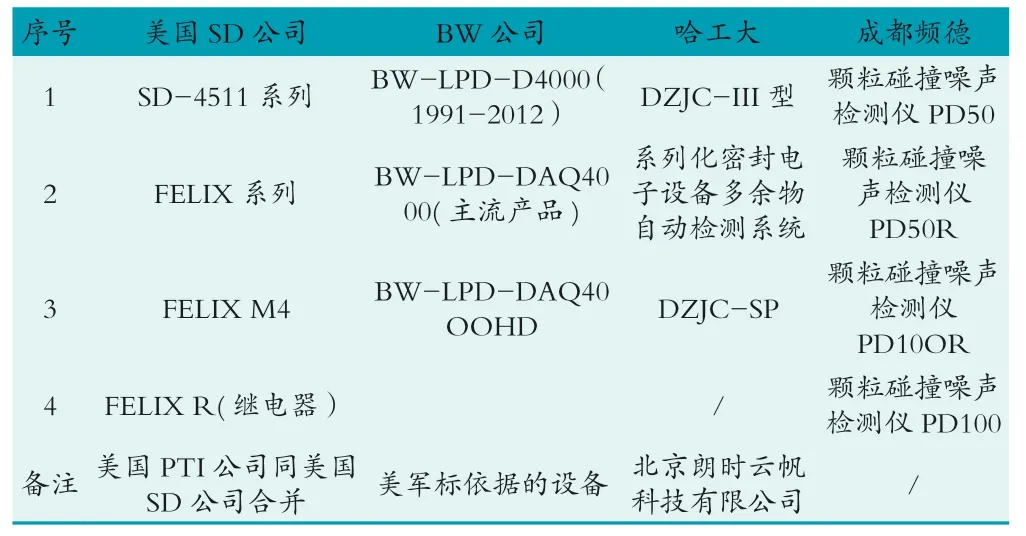
表1 国内外PIND设备
4 结论
GJB548A/B/C、GJB128A/B所有同条件A公式推导出腔高和频率的关系,都是假设所有的粒子都精确地沿着振动筛选预定轴向运动方向运动,通过将频率与内腔位移相匹配,理论上从传感器获得最大位移信号。但事实上,大多数粒子在空腔中是沿着对角线运动,从而延长了运动路径,故条件A这个公式基本上是基于理论,有一定程度的漏判比例。而条件B在美军标中有所说明,是由德州仪器公司(TI)发起的增加项,基于数百万次试验的试验总结,能最大限度判定不同封装的足够质量的内部微粒的碰撞噪声存在。现没有任何研究表明,试验条件A与B在准确度上的优劣性。国际上最新的理念,是基于全新的数字化系统,创建一个更新的、更复杂的运动,包含随机冲击和正弦振动,把所有类型的运动模糊混在一起,利用PIND设备,为每个封装的元器件编写适合自己或者专属程序,最大化筛查出多余物。
